
智能驾驶整车仿真模型搭建方法研究
2022-05-27 14:54张峻荧苏芮琦王士焜黄波
汽车科技 2022年3期
张峻荧 苏芮琦 王士焜 黄波








张峻荧
毕业于湖南大学车辆工程专业,本科学历。现就职于襄阳达安汽车检测中心有限公司,任智能网联系统部件仿真试验技术主管工程师,主要研究方向是智能网联系统及部件仿真技术。
摘 要:本文提出了一种用于智能驾驶系统或部件仿真验证的整车仿真模型搭建方法,基于系统级建模思维对整车进行模块化分析确定建模思路,从实车试验数据获取关键技术参数,再结合基本的车辆结构参数建立实车各子系统等效仿真模型。本文基于veDYNA和Simulink联合仿真软件搭建了某款纯电动车辆的整车模型用于自动驾驶控制器仿真测试,验证数据表明模型满足仿真验证需求。
关键词:车辆模型;仿真测试;veDYNA;系统级建模
中图分类号:U467.1 文献标识码:A 文章编号:1005-2550(2022)03-0039-05
Research on Building Method of Intelligent Driving Vehicle Simulation Model
ZHANG Jun-ying, SU Rui-qi, WANG Shi-kun, HUANG Bo
( Xiangyang Da An Automobile Test Center CO., LTD, Xiangyang 441004, China)
Abstract: This paper proposes a vehicle simulation model building method for intelligent driving system or component simulation verification. Based on system-level modeling thinking, the vehicle is modularized to determine the modeling ideas. The key technical parameters are obtained from actual vehicle test datas, which are combined with the basic vehicle structure parameters to establish an equivalent simulation model of each vehicle subsystem. Based on the Co-simulation software of veDYNA and Simulink, this paper builds a full-vehicle model of a pure electric vehicle for the simulation test of an automatic driving controller. The verification data shows that the model meets the requirements of simulation verification.
Key Words: vehicle model; simulation test; veDYNA; system-level modeling
1 引言
隨着智能驾驶技术水平的提高,相关产品智能化和自动化水平不断提升,由系统执行动态驾驶任务的场景范围、持续时长扩展快速。在智能驾驶产品快速进入市场的同时,自动驾驶车辆事故数量和频次也在增加,其可靠性越来越受大众关注和质疑。为了保证智能驾驶产品的安全性,特别是应对复杂场景、极端场景的能力,行业内基本达成共识:仿真测试、封闭场地测试、公开道路测试相结合是智能驾驶产品验证性价比最高、最可靠的手段。
在智能驾驶仿真测试中,通过车辆动力学仿真软件模拟实车来满足感知、规划决策、控制闭环测试需求是关键技术之一。为了保证良好的仿真精度和准确性以更客观地评测待测系统,一是需要成熟、专业的车辆仿真软件,二是需要依据实车参数进行精准建模。目前行业内普及较广的专业车辆动力学软件有PanoSim、 CarMaker/TruckMaker、veDYNA、CarSim/TruckSim等,本文是在veDYNA中进行整车建模的,veDYNA支持模型参数化配置、各种车辆类型配置、线控接口采用Simulink建模接口易于扩展自定义功能。在整车仿真模型搭建方面,目前主要有两种路径:一种是从车辆物理结构角度,通过配置非常详细的车辆结构特性参数来进行仿真模拟,这种方式需要车辆上每个部件的参数均非常详尽,比较适合车辆机械性能方面的仿真;另一种是从汽车动力学理论角度,基于实车行车不同工况的动力学特性将整车分解到子系统级而不是部件级进行建模,这种方式比较简单且需要的参数相比前一种方式少很多,比较适合智能汽车仿真测试,所以本文采用的是第二种方式,根据子系统件各部件间的相对运动关系定义相应的拓扑结构并对其进行“整合”,将相对间没有明确运动关系的部件当作一个整体来建模。
2 车辆模型分析
本文以满足某款自动驾驶控制器HIL仿真测试的需求来探讨和分析整车模型搭建的方法。仿真测试平台的逻辑结构如图1所示,其中车辆动力学模型中包含了车体、悬挂系统、动力系统、传动系统、制动系统、转向系统等的参数化模块以及线控I/O接口,当车辆动力学模型接收到待测控制器的加速、制动、转向等控制指令后,依据复杂的运动学和动力学实时计算得到新的车辆位姿、状态信息,并将更新的数据发送给其它模块来模拟真实车辆的运动行为。
汽车是一个复杂的系统,可以抽象成单轨模型、双轨模型或者各多自由度的非线性模型。构建高精度、多自由度的车辆模型需要参数类型和数量较多,待测控制器装配的实车是一辆低速运行的纯电动车辆,能够获取的实车参数无法满足高精度复杂的车辆动力学模型构建需求,因此构建高效、简单的车辆动力学模型但能较精确反映各种行驶工况下的车辆动力学和运动状态是客观评测待测自动驾驶控制器的关键。
对应自动驾驶控制器加速、制动、转向三个关键动作指令,构建车辆模型时从分析实车在不同工况下响应三个指令的行为数据入手,重点聚焦在基于仿真软件已有基础模型、实车可获取参数搭建对应的驱动单元、制动单元和转向单元模块使其在不同仿真工况下的整车行为与实车数据规律高度一致。
2.1 驱动系统
待测控制器发送给实车动力系统的加速指令是油门踏板开度,待模拟的实车是纯电驱车辆,前轮驱动、无变速箱,除基本的轮胎尺寸参数外可获取的参数只有电机输出驱动力和油门开度指令关系。veDYNA软件自带的动力模块中只有传统燃油车模型,其动力系统&传动系统不能直接用于模拟该实车的驱动系统,需要依据关系进行等效动力学转换。假设不考虑各驱动轮差异和离合影响,两者简化的等效关系如式(1)所示,其中TEngOut是发动机输出扭矩,i1、i2、i3分别表示变速箱、主减速器、轮边减速器减速比,TMorMax是电机输出的最大力矩,AccPed是自动驾驶控制器油门开度指令。
TEngOut×i1×i2×i3=TMorMax×AccPed (1)
为了简化模型搭建过程,设置i3=1,i2为常值,这样可以通过实时调节变速箱的变速比来进行等效转换。
2.2 制动系统
待测控制器在自动驾驶模式时发送给实车制动系统的制动指令是目标减速度,可获取的待模拟实车动力学参数只有制动力分配系数,无制动器制动力、轮胎力学参数、制动力传递时间、制动效率等相关参数,而veDYNA是通过控制制动踏板开度实时调节制动力矩的。因此对于制动系统的仿真模型搭建,将实车整体作为分析对象的方法会比较适用:同步采集实际道路工况中目标减速度和实际减速度数据,对不同工况的数据进行统计、分析、构建关系模型。相应地在veDYNA中以整车减速度响应与实车数据一致为目的进行建模:依据实车类型从veDYNA模型库中选择一个基础制动模型作为模板,再通过位置式比例积分PI控制器进行建模和调参来调节制动踏板开度以搭建减速度控制模块,其中BrkPed(n)是n时刻输出给veDYNA制动踏板开度,TrgtDec为待测控制器的目标减速度,ActDec为当前veDYNA实际减速度。
BrkPed(n)=Kp×en+Ki×∑j=1ej (2)
其中en和ej计算如下,并且需要对积分部分进行限幅处理。
en=(TrgtDec(n-k)-ActDec(n-k))
ej=(TrgtDec( j)-ActDec( j))
2.3 转向系统
待测控制器在自动驾驶模式时发送给实车转向系统的转向指令是方向盘目标角度,待模拟实车可获取车辆转向系统参数有轴距、轮距、理论/设计转向比,无更多转向响应环节中的关键特性参数。本文将转向单元简化成单轨模型,通过采集实车数据分析转向系统常值和非线性参数,包括:转向系统机械間隙,实际转向比,不同方向盘角度输入下的转向响应延迟环节特性参数、滞回环节特性参数、转向角速度等。
采用单轨模型忽略转向内外轮转向差,转向主销距用转向轴轮距进行近似,基于这样的假设,对应转弯半径模型近似为式(3),其中Rs为转弯半径,L为前后轴轴距,θw为方向盘转角,is为转向比即方向盘角度和转向轮角度的比值。
(3)
采集实车运动轨迹离散坐标点,采用最小二乘法将该运动轨迹拟合成二阶曲线y=f (x),相应地,运动轨迹的曲率半径计算模型为:
(4)
在实车数据采集或者从实车数据中提取用于模型分析的工况数据时,设计或者选取较稳定的转向角度输入能提高模型计算精度,考虑减少计算量和算法适用性,本文选择PT1滤波器对转向角度进行平滑处理,平滑后的转向角输入用于依据式(3)和式(4)求解实车实际转向比、机械间隙、响应延迟等特性参数的计算。
3 车辆建模
在前述建模思路的基础上,车辆建模的主要工作包括:搜集实车参数和试验数据,分析实车试验数据以验证或获取主要技术参数,根据实车车型、驱动方式、转向方式在veDYNA选择基础模型作为建模模板,在veDYNA中配置车辆基本参数,结合已配置参数与建模目标差异在Simulink中搭建策略模块和调参以实现等效转换。
3.1 参数获取
从实车测试数据中同步提取用于分析和建模的参数主要包括车辆运动轨迹参数、自动驾驶控制模式下的车辆状态参数和自动控制器相关的指令参数。
(1)定位数据:全局坐标X、全局坐标Y、全局坐标Z、航向角。
(2)车辆数据:各执行模块实际工作模式、实际车速、实际加/减速度、实际转向角度、实际档位。
(3)自动驾驶控制器数据:各执行模块的控制模式、目标减速度、油门踏板开度、方向盘目标转向角度、目标档位、目标速度。
3.2 参数分析
根据实车与仿真建模等效转换需求分析,需要从实车测试数据中分析得到的参数主要包括转向响应时间、转向系统转向比、转向角度-转向角速度关系、制动响应时间、目标减速度-实际减速度关系、(空载)驱动响应时间、(空载)目标油门踏板开度-实际加速度关系。统计自动驾驶模式下、典型行车场景、实车状态较稳定时的数据。
分析统计的数据确认子系统动态响应特性,在分析结果上建立对应的关系模型:转向角度-角速度关系模型采用最邻近模型,目标油门踏板开度-实际加速度和目标减速度-实际减速度关系模型采用线性插值查表模型。
3.3 仿真建模
实车为前驱、前轴转向,相应地在veDYNA通用车辆参数、前轴参数、动力传输三个界面完成车辆主要参数的配置。
为了构建与实车纯电驱动系统等效的动力模型,在veDYNA中配置了一个7档自动变速箱,对应各档位的变速比依据实车目标油门踏板开度-实际加速度关系模型调参得到。
在Simulink中分别搭建驱动、制动、转向等效模型的转换策略模块:
(1)待测控制器目标油门踏板开度指令-veDYNA油门踏板开度关系模型如图2所示,通过搭建合适的veDYNA换档策略适配veDYNA发动机模型,以满足待测控制器油门踏板开度指令对应实车目标驱动力矩需求。
(2)待测控制器目标减速度指令-veDYNA制动踏板关系模型如图3所示,通过构建位置式PI控制器较精准生成映射关系,从调参分析判断分段PI更合适。
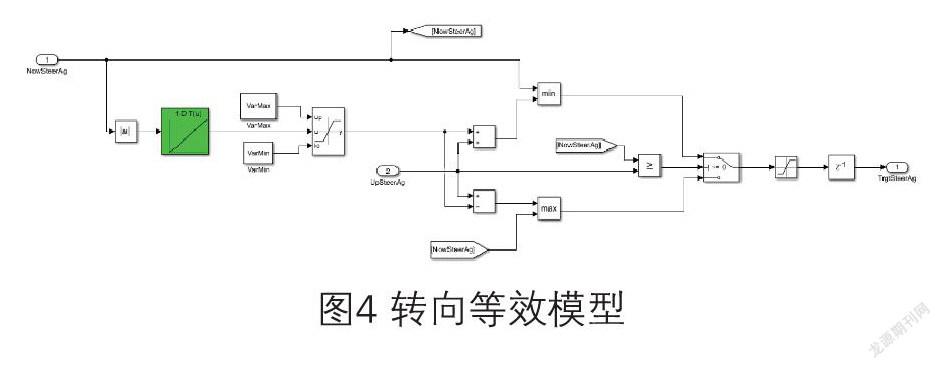
(3)待测控制器目标转向角度指令-veDYNA方向盘角度输入关系模型如图4所示,通过约束信号变化率生成实车转向角速度特性。
4 模型验证
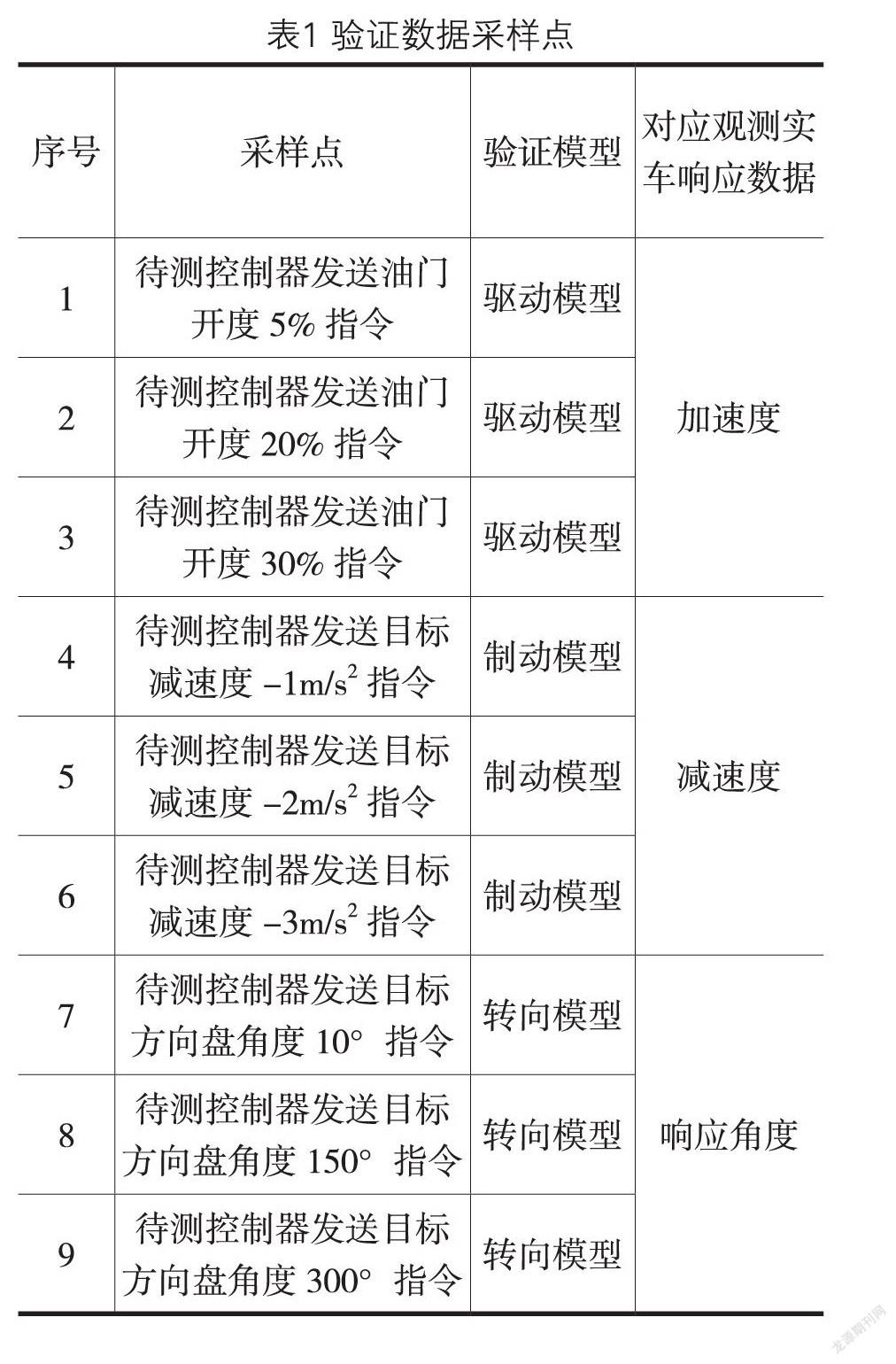
因控制器在环的HIL仿真测试中仿真车辆相关动作指令均由待测控制器内部策略确定,无法根据验证需要进行自定义。为了验证模型,通过设计同时包含直道和弯道的目标轨迹保证仿真车辆在该轨迹上行驶时待测控制器会发出驱动、制动、转向指令。设计的目标轨迹如图5所示:
在待测控制器控制仿真车辆沿着目标轨迹行驶的过程中,采集典型的控制指令及其对应的仿真车辆响应数据来验证搭建的车辆模型。
通过对比实车数据和仿真测试采样工况点数据,对搭建的仿真模型进行校核,仿真数据如图6所示。从对比数据可以看出,表1所列的典型采样工况点附近,仿真模型响应的加速度、减速度、转向角度与等效模型目标值即实车值高度一致,从而验证了整车模型。
5 结语
本文提出一种高效、简单且能较精确反映各种行驶工况下的车辆动力学和运动状态的车辆动力学模型构建方法,不需要详尽的车辆结构特性参数,主要基于系统级特性的建模思维,利用实车测试数据建立各子系统等效仿真模型。该方法建模效率高、模型精简且能满足控制器仿真测试需求,特别适用于实时仿真。因现有实车數据限制,各子系统模块精细度尚待深度优化,后续在条件具备的情况下计划采集更多工况的实车数据对映射关系模型进行进一步细化和扩展以提高整车仿真模型的准确度。
参考文献:
[1]赵祥模,承靖钧,徐志刚,王文威,王润民,王冠群,朱宇,汪贵平,周豫,陈南峰.基于整车在环仿真的自动驾驶汽车室内快速测试平台[J].中国公路学报,2019(6):124-136.
[2]邵建,郭建军,周伟,路中达.车辆系统级特性建模和整车动力学仿真[C].中国汽车工程学会年会论文集,2014:1075-1078.
[3]裴学杰.基于Carsim的整车模型的建立和仿真分析[J].轻工科技,2016(8):59-60.
[4]何焜.特种车辆整车建模与动力学仿真[D].南京理工大学,2005.
[5]李刚.车辆模型转向盘角阶跃输入运动的仿真研究[D].大连理工大学,2004.
