
电气传动设备低频-前馈复合控制技术
2022-05-26 02:47王浩
机械与电子 2022年5期
王 浩
(国网江苏综合能源服务有限公司,江苏 南京 210019)
0 引言
各个行业都离不开电气能源供给。目前,综合能源已作为主流能源接入电气传动设备,推动电气设备的运转和所需能量转换。但能源接入对电气传动设备造成能量冲击的同时,也会产生相应的干扰,不利于生产工作效率,也对周边居民的生活环境产生影响,因此对综合能源接入下电气传动设备低频-前馈复合控制的研究迫在眉睫。
传统控制方法更多关注高频扰动的去除,侧面加重了设备自身的承载负担,还会影响电气传动设备的散热,且扰动抑制效果并不理想,传动设备的高频扰动无法消除。为此,冯硕[1]优化包装机电气控制系统,从伺服系统机械传动方面减少高频扰动现象。徐大可等[2]建立了具有惯性响应和一次调频能力的虚拟同步发电机控制策略,快速调整有功功率的合理分配与荷电状态,减少外界干扰。
综合以往研究方法,提出一种综合能源接入下的电气传动设备低频-前馈复合控制技术。
1 电气传动设备扰动信号采集和预处理
在电气传动设备上安装信号采集传感器[3],对电气设备产生的干扰进行采集,将采集的扰动信号作为初级信号,利用扬声器还原采集好的初级扰动信号,用S0表示,利用预处理控制初级扰动信号,得到控制后的扰动信号S1,对比二者信号间的误差,统计形成误差变量函数,即
(1)
e1(t)为时间为t1时传感器的误差信号;N为安装前馈装置的任意一点。为了估计出不同位置的控制性能[4],将误差变量归一化处理,用标准函数表示为
(2)
2 电气传动设备有限分析元模型
为了更好地控制综合能源接入电气传动设备所产生的扰动现象[6],建立电气传动设备有限分析元模型。在传动作业时,电气设备表面振动频幅是影响扰动信号大小的主要因素,本文采用边界元法对其求解,分析电气传动设备表面结构,在表面结构分析元网格上,完成电气设备外部声场的计算。
电气传动设备表面振动下,其自身所辐射出来的声压用p(r,t)表示,在满足电气设备外部声场的声学边界条件下,引入声学函数:
Δ2p(r,t)-k2p(r,t)=0
(3)
(4)
(5)
Δ2为拉普拉斯算子;r为电气设备表面立体声场中Q、P这2点间的物理距离,Q为电气传动设备表面S上的任意一点,P为电气传动设备底部范围任意一点;k=wlc为扰动波数,w为声音振动频率,c为扰动信号在空气中传播声速;n为单位矢量;a(r,t)为电气传动设备表面垂直方向振动加速度;rs为电气传动设备振动表面上任意一点。谐波电压Un的有效值表达式为
(6)
对其求解,可得
(7)
将谐波电压的求解结果与式(3)~式(5)联立,进一步推导,获取电气传动设备的底部外场声压p(P)与垂直方向振动加速度a(r,t),设置设备外场扰动情况的微分方程式,即
c(P)p(P)=
(8)
c(P)=α/4π,α为电气传动设备表面结构上P点的表面呈现角度;a(Q)为电气传动设备三维声场中Q点处垂直方向振动加速度;S(Q)为包含Q点在内的电气设备表面面积。
利用边界元法将式(6)中各个单元及节点离散处理,得到结果为
(9)
C、D为描述干扰对电气设备所产生的影响矩阵[7];p为电气传动设备作业时在分析元网格各节点上的声压向量[8];a为电气设备网格上各节点在垂直方向的加速度向量。利用插值法,对式(9)求解,得到电气传动设备底部空间上外场中任意一点P处的作业辐射声压p(P),即
(10)
c、d为电气设备运行时所产生干扰的差值系数矩阵。
3 电气传动设备低频-前馈复合控制技术
3.1 物理隔声控制
在电气传动设备上,附加物理隔声装置[9],在进行传动作业时,电气传动设备自身所产生的电压位于设备顶部和底部,形成上下环绕的电场力,中间部位虽属于电场力中,但处于相对平衡状态,将隔声腔安装在电场力相对稳定的部位,能够更好地控制扰动信号传播,不会影响电器传动设备的正常作业。因此,本文将物理隔声腔安装在电气传动设备的中间部分,通过简化电气传动设备,可以得出其周围两极电场力和激励电压之间的关系[10]。
两极板之间的电场力为
(11)
A为极板面积;ki为电极之间的距离;u(t)为电压。
附加隔声腔后,电气传动设备的基波电压为
u0(t)=U0sinwt
(12)
U0为电气传动设备的基波电压有效值;w为角频率。
谐波电压表示为
un(t)=Unsinwt
(13)
Un为电气传动设备的谐波电压有效值。
附加隔声腔的电气传动设备上,基波和各个谐波叠加后的电压表示为
u(t)=u0(t)+un(t)
(14)
联立以上公式,可以得到电气传动设备的电场力为
(15)
其中,基波电压的有效值为
(16)
3.2 电气传动设备低频-前馈复合控制系统
通过传感器误差信号e1(t)、e2(t)以及传感器采集的信号数据u(t),对误差信号进行优化处理并建立相应的基础函数,用Vk(q)表示。
对扰动所产生频域进行估计比对,即
(17)
(18)
(19)
(20)
(21)

(22)

基于以上操作,对综合能源接入下电气传动设备作业时所产生的扰动信号进行控制,阻隔信号传播,降低声压,使扰动信号得到有效抑制,减小对周围环境和作业人员影响。
4 算例分析
设置一个电气传动设备监测点,对综合能源接入下的电气传动设备产生的干扰进行了测试。
4.1 不同攻角扰动抑制测试
电气设备干扰声压频谱分布结果如图1所示。
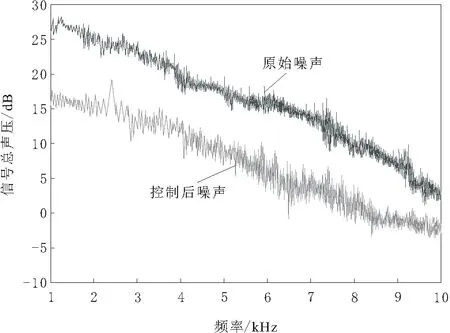
图1 水平作业时扰动抑制前后频谱
由图1可知,在水平方向上,原始扰动信号的总声压值为28.5 dB,经过文中方法控制后的干扰总声压值为17.8 dB,信号在经过控制后声压下降了37.5%,声压降低效果较为明显。
但电气设备在传动作业时,需要在不同角度变换,所产生的干扰频域和声压也不尽相同,扰动抑制技术在不同角度对干扰的控制情况也会有所不同。模拟电气传动设备在不同角度下传动作业的声压频谱分布,分别对攻角为2°、6°、10°时的扰动抑制情况进行测试并对比,如图2~图4所示。
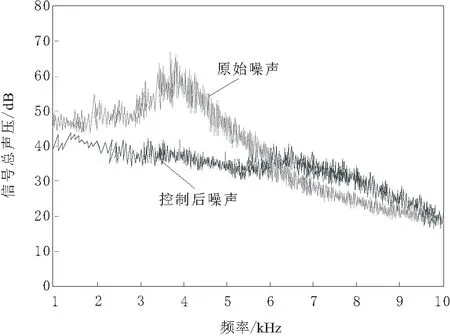
图2 攻角2°的扰动抑制前后频谱
由图2~图4可知,在3 000~6 000 Hz频率范围内,频谱图内原始扰动信号出现了类似驼峰状的尖峰波动,攻角不同时,峰值也不相同,攻角在2°、6°、10°时,原始扰动信号的波动峰值分别为69.5 dB、68.4 dB和65.2 dB,攻角增加时,原始扰动信号的驼峰状尖峰波动会随之降低,且控制后噪声的峰值皆存在不同程度的降低,扰动抑制效果明显。由此可见,攻角越来越大,驼峰状尖峰波动越来越低,扰动抑制前后频谱差异缩减,但抑制效果依旧明显,具有较优的控制性能。
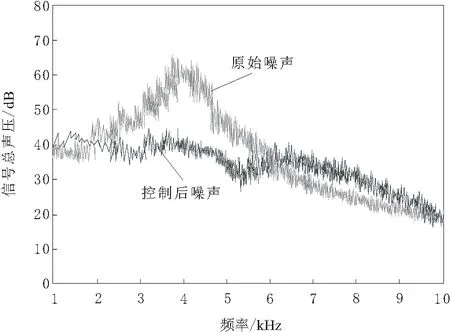
图3 攻角6°的扰动抑制前后频谱
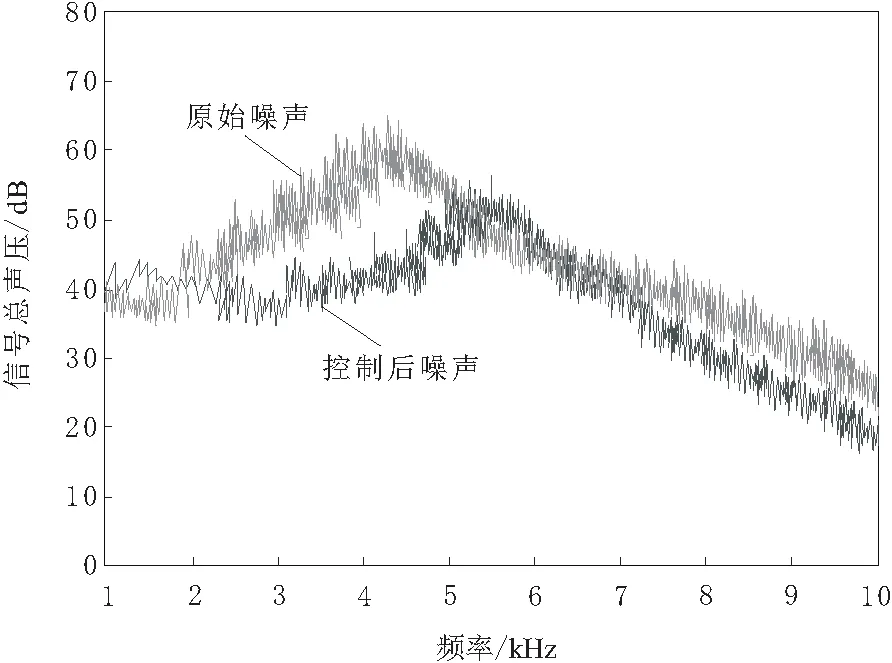
图4 攻角10°的扰动抑制前后频谱
4.2 扰动抑制效果测试
为进一步测试所提方法的有效性及吸声效果,以吸声系数为评价指标,吸声系数表示任意材料或构造对声音的吸附能力,在测试中使用相同材料,计算不同扰动抑制技术下透射过材料后干扰大小,计算不同方法的干扰吸声系数,测试结果如图5所示。
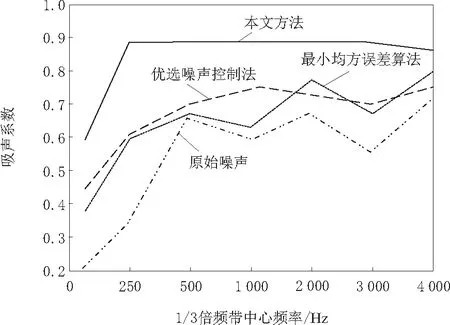
图5 吸声效果对比
由图5可知,原始扰动信号从产生开始频率迅速增加到500 Hz, 之后出现震荡上浮趋势,优选扰动抑制法在250 Hz内对干扰的控制较好,吸声效果明显,随着干扰频率越来越大时,优选扰动抑制法的吸声效果保持稳定增长,但在干扰震荡较大的情况下,并不能完全吸收干扰,最小均方误差算法的吸声效果明显不如优选扰动抑制法,在高频率干扰情况下,无法获取良好的吸声效果,反观本文方法,当干扰出现时,可以很好地控制和吸收干扰,250 Hz后吸声效果保持均匀稳定,具有很高的吸声性能,吸声效果较优。
5 结束语
提出了一种电气传动设备的低频-前馈复合控制技术,并进行了测试,可得到如下结论:
a.在传动作业的各个角度下,当电气设备受到干扰最高峰值时,扰动抑制效果依然明显,能够降低声压。
b.扰动抑制效果不受作业角度限制,吸声更加稳定,吸声系数高,吸声效果明显较优,控制性能较好。
猜你喜欢
压电与声光(2022年3期)2022-07-16
北京航空航天大学学报(2021年7期)2021-08-13
空间科学学报(2020年6期)2020-07-21
科学技术创新(2020年19期)2020-07-03
物理实验(2020年3期)2020-04-18
中国惯性技术学报(2019年3期)2019-10-15
宇航总体技术(2019年5期)2019-10-11
中国惯性技术学报(2019年6期)2019-03-04
汽车工程(2018年12期)2019-01-29
火力与指挥控制(2017年11期)2017-12-19
