
四足机器人机械结构设计与最优腿部配置研究
2022-05-26 13:00王亚锋颉潭成徐彦伟黄照翔
制造业自动化 2022年5期
王亚锋,颉潭成,2*,徐彦伟,2,黄照翔
(1.河南科技大学 机电工程学院,洛阳 471003;2.智能数控装备河南省工程实验室,洛阳 471003)
0 引言
机器人的主要移动方式有轮式、履带式和足式,与轮式和履带式相比,足式机器人能够更好的适应复杂地形,并且具有较好的灵活性,为此,足式机器人成为机器人研究领域的热点[1]。与六足和八足机器人相比,四足机器人的机械结构和控制更为简单;与双足机器人相比,四足机器人稳定性和负载能力更优越[2],因而四足机器人具有更好的综合性能,发展前景广阔。
近年来,如何提高四足机器人的运动稳定性成为研究重点。越来越多的科研人员开始从仿生学的角度出发,利用生物体的一些独特特征,设计制造出满足要求的四足机器人[3~5],其中最为出名的是波士顿公司开发的BigDog和Cheetah两款机器人[6,7]。基于仿生学原理,四足机器人机械结构设计方面参考最多的案例是仿爬行类四足机器人和仿哺乳类四足机器人[8]。马相对于其他哺乳类动物,可以更好的适应复杂地形,并且具有运动速度快、负载能力强等优点。为了提高四足机器人运动稳定性,本文基于马的生物原型进行机械结构设计,并对腿部结构进行优化,使其在更大运动空间的基础上,提高其运动稳定性[9]。
1 四足机器人机构设计
1.1 整机结构设计
四足机器人的整体结构设计如图1所示。为了减轻腿部负载、避免能耗损失,四足机器人的八个动力源全部放在机身上且成对称形式放置。该四足机器人是以齿轮齿形带进行动力传输,位于髋关节的两个无刷电机,一个电机控制大腿的前后摆动,另一个电机通过齿形带带动膝关节的齿轮转动,从而实现小腿的前后摆动。

图1 四足机器人整体结构图
四足机器人的结构材料主要采用铝合金7075,该材料具有良好的耐磨性,且经消除应力,加工后不易变形,满足机械结构中的材料要求。四足机器人的大、小腿长度大致相同,腿部关节采用全肘式,可以降低控制的复杂程度。
1.2 单腿结构的设计及优化
拟设计四足机器人的每条腿具有髋关节和膝关节两个主动关节,每个关节具有1个摆动自由度,即整个四足机器人一共有8个自由度。四足动物在运动过程中,踝关节主要作用是减缓足端与地面的冲击,因此本文在设计四足机器人时将踝关节舍去并在足端增加弹性材料,以达到缓冲减震的效果,腿部三维结构如图2所示。
图2 单腿三维结构图
四足机器人的腿部结构在承受整体重量及满足一定性能要求的前提下要尽量轻质化。轻质化的腿部结构不仅可以降低四足机器人的能耗、节省材料,且更有利于复杂步态的实现。利用SolidWorks Simulation的静应力分析部分中的设计洞察模块可以帮助设计者在所选结构的静应力分析结果的基础上,开发创新出满足强度、刚度和质量等要求的缩减结构,使缩减后的结构在最大程度上满足设计者的要求。
将大腿和小腿的主要承重部位进行设计洞察优化,结果如图3所示。经设计洞察优化后的腿部结构呈现出深色实体部分和半透明部分,深色实体部分可以有效承受给定的载荷,为达到结构轻质化的效果,半透明区域可以选择性移除。


图3 设计洞察图
本文在设计四足机器人时,采用具有弹性的球形橡胶材料作为四足机器人的足端,球形足端不仅可以与地面各个方位进行良好的接触,而且还可以增加足端与地面的摩擦力,有利于提高四足机器人整体的稳定性。腿部轻质化结构如图4所示。

图4 腿部轻质化结构图
2 腿部结构有限元分析
结合四足机器人的动态步态分析,足端落地时的速度和加速度都为零,根据四足机器人的整机重量,可以得出地面给足端的最大作用力。设零载荷情况下四足机器人整机重量是20kg,为了保证结构的承受力,乘以安全系数1.2,控制整机重力在240N。四足机器人在动态行走时,只有对角两条腿的足端着地,所以理论上单腿受到最大的力为120N[11]。此处为了腿部结构受力时留有余量,将腿部最大受力提高到150N。
2.1 大腿受力分析
大腿连接着髋关节与膝关节,受力分析时只需给大腿施加一个与髋关节连接端面垂直的力,固定约束加于螺纹孔中,定义模型材料为铝合金7075,网格大小为1mm。有限元分析结果如图5所示。
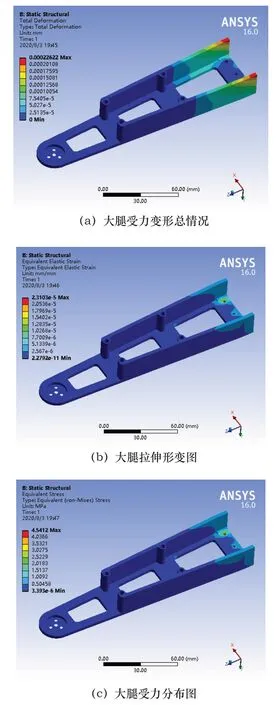
图5 大腿受力变形情况
大腿施加负载后,腿部结构发生了轻微的形变,形变上限为2.26×10-4mm,拉伸上限为2.26×10-5mm,压力上限为4.5412MPa,此时的形变极小,腿部所受到的压力都在铝合金7075的承受范围内,所以大腿结构符合设计要求。
2.2 小腿受力分析
小腿一端与膝关节相连,另一端与地接触,受力分析时只用给小腿足端施加一个垂直于足端底面的力即可,在与膝关节接触的螺纹孔中施加固定约束,定义模型材料为铝合金7075,网格大小为1mm。有限元分析结果如图6所示。
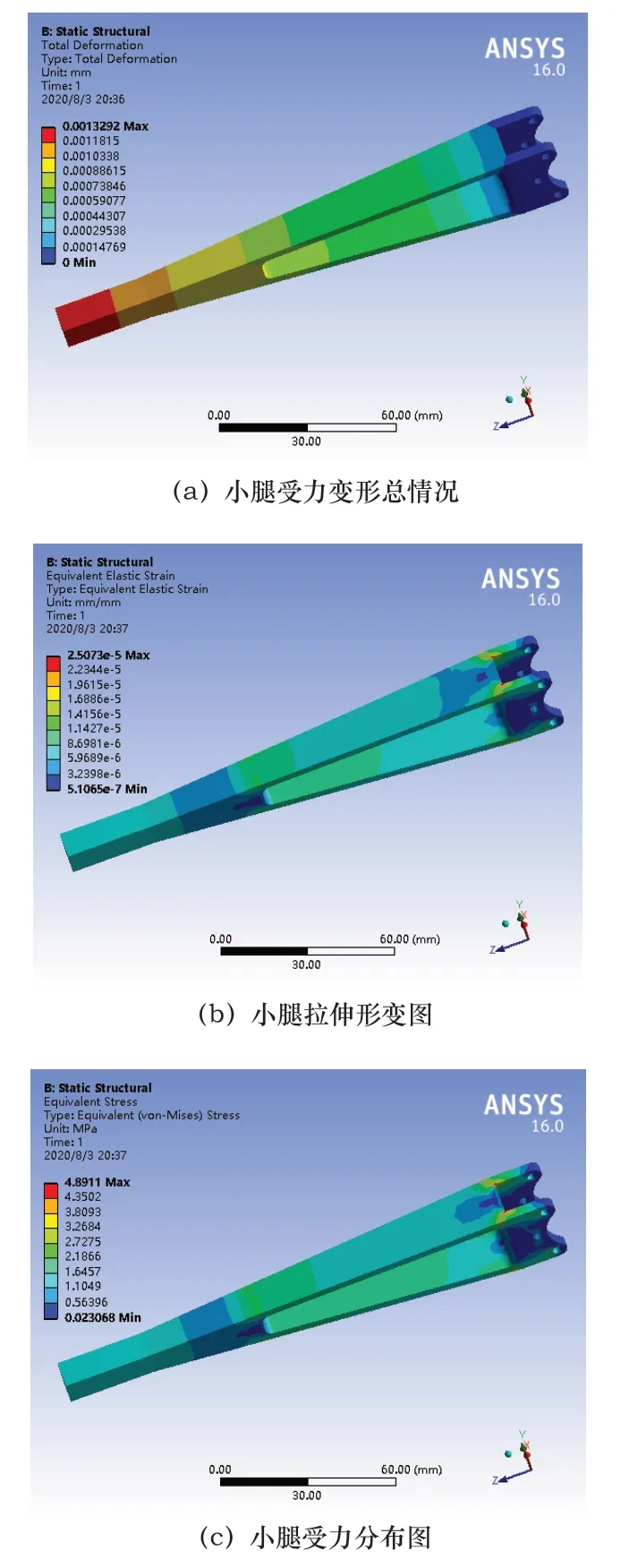
图6 小腿受力变形情况
小腿施加负载后,腿部结构也发生了轻微的形变,形变上限为1.33×10-3mm,拉伸上限为2.51×10-5mm,压力上限为4.8911MPa,此时的形变极小,腿部所受到的压力都在铝合金7075的承受范围内,所以小腿结构符合设计要求。
3 运动学分析
3.1 步态分析
四足机器人步态规划共有两个重点:一是保证四足机器人进行步态运动时的稳定性;二是控制四足机器人不同运动状态时的速度。本文选择对角小跑步态(Trot)作为主要步态,原因如下:1)适配性强,Trot步态易于与静态步态进行步态转换,并且对复杂地形有较强的适应能力;2)容易控制:Trot步态中的对角线前后腿关节处的运动相位相同,可以使其运动具有对称性,降低姿态控制时的复杂程度,减少不必要的动作,保持机身的运动稳定性。3)稳定性较好:在运动过程中,假如对角线上的两条支撑腿发生侧翻,另一对角线上摆动的双腿可以快速着地,防止机身发生侧翻。
3.2 运动学正解
本文中的四足机器人是通过调节髋关节处的8个无刷电机的转动角度来控制四足机器人的位置和姿态,这一直以来是四足机器人控制方面的重点和难点。由于本文设计的四足机器人四条腿结构完全相同,由前文有限元分析结果可知,此处可忽略腿部的受力变形,下面以四足机器人的一条腿为例,研究其作为刚体的正运动学情况。
采用D-H法对四足机器人的单腿进行正运动学分析时,首先要建立准确的坐标系,然后用相应坐标系的位置矢量和旋转矩阵进行描述。这里假定四足机器人机身保持不动,对其中的一条腿进行分析。如图7所示,建立机体坐标系O0-X0Y0Z0,坐标系定义如下:Y轴方向为四足机器人的前进移动方向,Z轴方向为关节转动轴的方向,用右手定则确定X轴的方向。腿的D-H参数如表1所示。
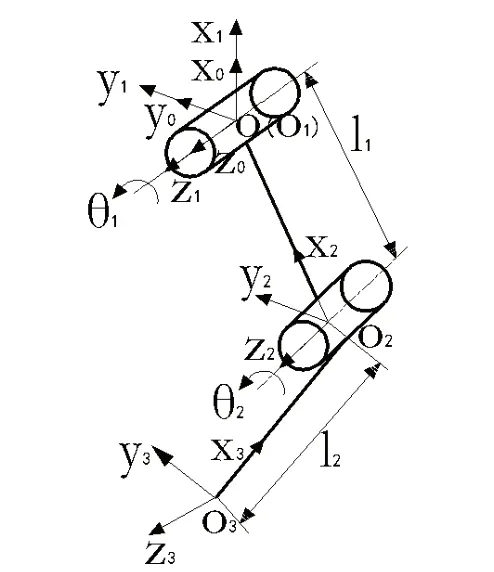
图7 单腿的D-H坐标系

表1 D-H坐标参数表
由图9和表1可得以下矩阵:

则足端相对于机身的齐次变换矩阵为:

3.3 运动学逆解
前文对四足机器人单腿正运动学的分析不仅验证了所设计的四足机器人结构满足实际应用要求,而且为后续四足机器人仿真工作提供了重要的理论基础。但是还要对所设计的腿部结构进行逆运动学分析,根据正运动学的结果,利用腿部的几何关系,可以求出关节转角与腿部参数的关系[12]:

3.4 足端运动空间
足端运动空间是四足机器人足端能够到达点的集合,该集合代表了四足机器人单腿的活动范围,它是影响四足机器人结构优化和驱动控制的重要因素。在前文研究四足机器人运动学正、逆解的基础上,利用MATLAB求解四足机器人单腿足端运动空间“云图”如图8所示。
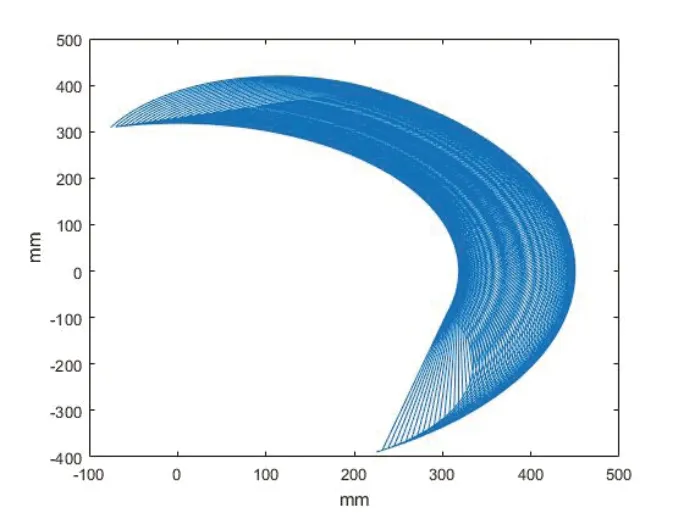
图8 足端工作空间“云图”
4 ADAMS仿真
将SolidWorks建立的三维模型以*.x_t格式保存,将模型导入ADAMS中之后,首先给四足机器人的每个零部件选择材料属性并定义零部件间的约束关系,其次在髋关节和膝关节处添加转动副,并在转动副处添加对应的驱动函数,最后调整并确定足端与地面的接触参数。
ADAMS仿真结果如图9所示,从图中可以看出四足机器人可以平缓的向前运动,符合实际四足动物对角小跑时的步态运动规律。

图9 四足机器人仿真截图
4.1 运动学仿真结果及分析
虚拟样机仿真后进入后处理模块,此模块可以得出四足机器人机身质心在X、Y、Z三个方向上的位移。其中X轴为机身移动方向,Y轴为关节旋转轴的方向,Z轴为竖直方向。仿真时的四足机器人采用对角小跑步态,所以对角腿的驱动函数图像相同,差异在于有半个周期的延迟。
四足机器人机身质心的位移曲线如图10所示。由图10(a)可知,机身质心在X方向上5s内的总位移为875mm,由此可得机身质心行进的平均速度为175mm/s。由图10(b)可知,机身质心在Y方向上5s内初末位置相差14.06mm。由图10(c)可知,机身质心在Z方向上的波动幅度为20.98mm,四足机器人总体高度为300mm,则机身质心在Z方向上的波动率为6.99%。以上检测结果都符合实际设计要求,表明本文设计的四足机器人运动平稳性达到预期要求。
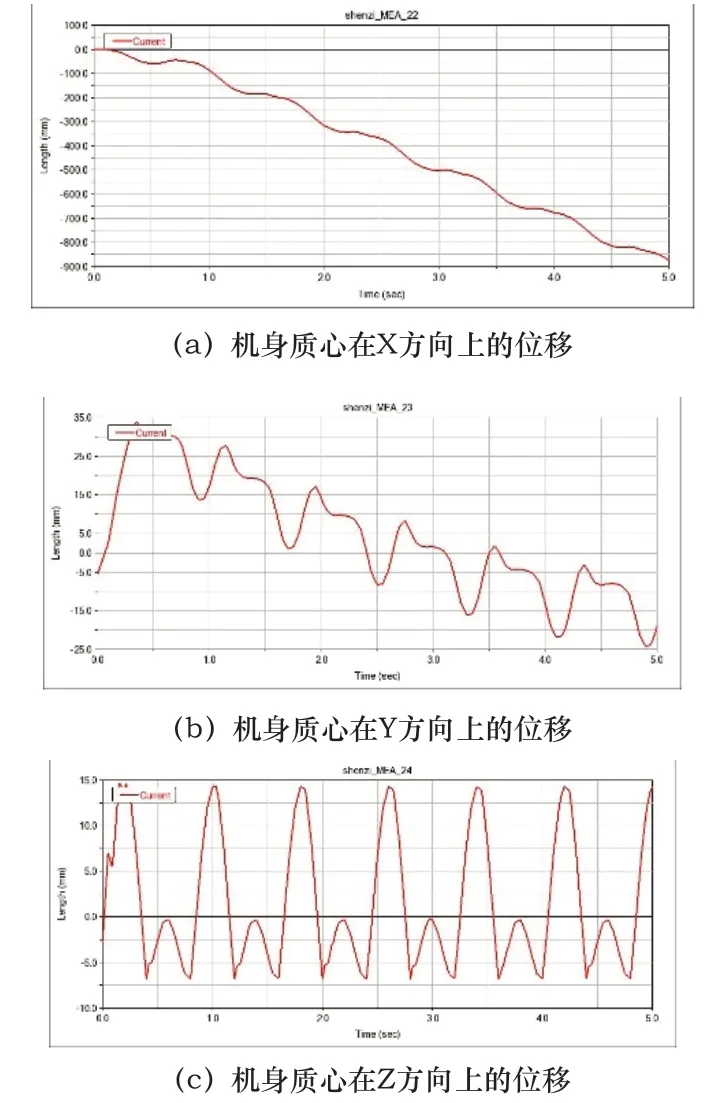
图10 机身质心位移曲线
图11中的(a)、(b)、(c)三个图分别是四足机器人机身质心在X、Y、Z方向上的速度曲线。
由图10和图11可知:四足机器人并没有沿直线行走,而是偏向一侧,这可能与四足机器人自身的步态、抬腿顺序以及地面碰撞力大小有关;机身质心速度并非恒定,可能与足端与地面间引起的摩擦有关,而且在足端抬落瞬间,与地面间的冲击也影响速度变化。

图11 机身质心速度曲线
4.2 动力学仿真结果及分析
动力学仿真分析是为了验证关节力矩和运动副上所受的力是否符合设计的要求。经过仿真,进入数据后处理模块,在这里采取的是对角小跑步态,对角腿的运动完全相同,仅选择一对腿进行分析即可,它们的髋关节和膝关节驱动力矩和关节转角的叠加图如图12所示。
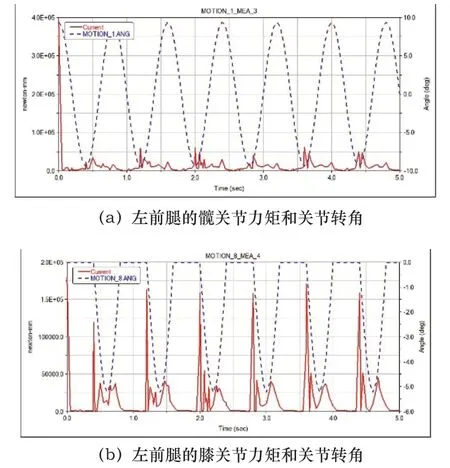
图12 左前腿髋关节和膝关节转角与力矩
图12中横坐标表示时间,纵坐标轴表示为该关节轴上所受到的力或者是力矩值,图中的正弦曲线表示各转轴的转动角度。通过ADAMS仿真得出了在不同的角速度之下各关节力矩的变化,从图中可以得出以下结果:无论是髋关节还是膝关节,在支撑相时所受的力矩总是大于摆动相时所受的力矩,同时得到关节转角和转矩的范围,可以为以后的研究发展提供理论依据。
5 结语
本文利用仿生学原理对四足机器人的机械结构进行设计优化,并通过Ansys对腿部结构进行了受力分析,使四足机器人承受应力的状态达到最优化,最后在运动学分析的基础上对虚拟样机进行Adams运动仿真。研究结果表明:
1)本文所设计的机械结构在轻质化的基础上,可以有效承载应力,并且形变量极小,完全可以满足使用要求。
2)通过Adams运动仿真,对四足机器人的质心位移、质心速度、髋关节和膝关节的驱动力矩及关节转角的分析发现,优化后的机械结构在运动稳定性方面得到了极大的提高,为后期四足机器人物理样机的稳定性实验提供了理论依据。
猜你喜欢
现代仪器与医疗(2022年4期)2022-10-08
汽车实用技术(2022年14期)2022-07-30
玩具世界(2022年2期)2022-06-15
北京航空航天大学学报(2021年4期)2021-11-24
中学生数理化·教与学(2019年5期)2019-06-06
电子制作(2018年18期)2018-11-14
科学之谜(2018年4期)2018-09-17
汽车实用技术(2017年20期)2017-10-24
伴侣(2016年8期)2016-08-11
恋爱婚姻家庭(2015年27期)2015-12-19
