
多源大数据引入的电网巡检机械臂滑模可视化控制
2022-05-26 13:00于兴国张凯旋
制造业自动化 2022年5期
邵 玲,于兴国,金 铭,张凯旋
(云南电网有限责任公司培训与评价中心,昆明 650000)
0 引言
近年来高精度机械制造技术使电网不断向智能化发展,其智能化越高依赖的数据越多源[1],因此将控制过程可视化呈现给用户,使用户更清楚掌握有用信息意义非凡。电网巡检机械臂是电网维护过程中很重要的一环,该机械臂的应用可在很大程度上提升电网的安全性。其可视化程度高低,也考验相关制造行业的水平。但机械臂在运行过程中受不确定因素影响,使其巡检不到位或出现运行停顿等状况,为此很多学者分别研究机械臂滑模控制方法。
例如:屈海军等人和黄自鑫等人研究的机械臂控制方法,前者依据机械臂关节旋转角度设计滑模控制器[2],但该方法受机械臂类型不同的影响,其可视化后的应用性不强。后者则依据机械臂既定轨迹,通过控制驱动方式实现其滑模控制[3],但其在可视化应用过程中,受机械臂旋转角度误差影响,导致其可视化控制效果不佳。主要是因为可视化过程高度以来大数据支撑,但是,为了保证可视化后的控制精度,数据来源必须是多源的。但是多源数据本身又带来了数据差异性,为了解决差异性,需要进行不确定性估值,这种不确定性的估值,本身也是一种干扰源。
为此本文将多源大数据可视化技术与电网巡检机械臂滑模控制相结合,研究多源大数据在可视化的电网巡检机械臂滑模控制中,合理引入问题。以提升电网巡检机械臂控制效果和可视化呈现效果。
1 电网巡检机械臂滑模控制方法
1.1 多源大数据引入的技术框架设计
电网巡检机械臂在工作过程中,对同一位置的数据巡检和采集具备多源特征,且数据量较为繁杂,为用户控制电网巡检机械臂带来了一定难度。针对电网巡检机械臂运动参数,将同一巡检位置的多源数据融合可为用户呈现电网巡检机械臂的统一描述视图,为用户呈现更加直观的电网巡检机械臂运作情况,也可更好地实现其滑模控制。设计多源大数据引入框架,其结构如图1所示。
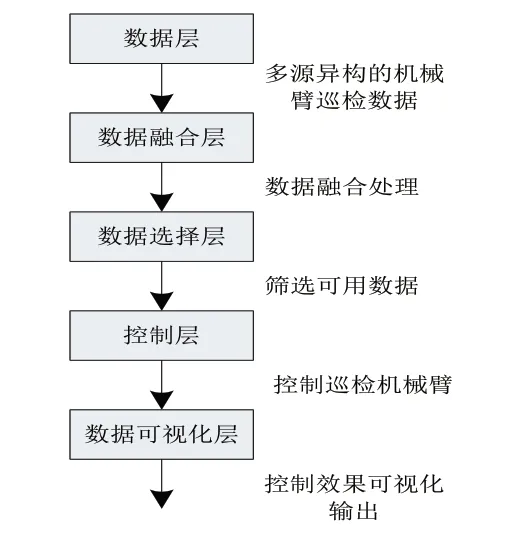
图1 多源大数据引入技术框架
多源大数据可视化引入技术框架:由数据层、数据融合层、数据选择层、控制层和数据可视化层构成。其中数据层是由多源异构的机械臂巡检数据组成,包括结构化、非结构化等多种类型数据,数据层将多源异构的机械臂巡检数据输入到数据融合层内,数据融合层使用Map-Reduce并行化处理方式对多源异构的机械臂巡检数据融合处理,将融合处理后的机械臂巡检数据传输到数据选择层内。数据选择层按照机械臂巡检数据的特征重要程度选取可用数据后,将选取的数据传输到控制层内。控制层将选取的机械臂巡检数据作为机械臂数学模型的输入,估计当前机械臂运动状态后,使用模糊自适应滑模控制器控制电网巡检机械臂后,将控制结果传输到可视化展示层内。可视化展示层利用可视化工具展示电网巡检机械臂控制结果。
1.2 多源数据控制层设计
1.2.1 电网巡检机械臂多源数据模型构建
电网巡检机械臂是由非完整的移动台与二连杆机械臂组成的可移动的机械臂,其移动台由具备独立驱动功能的前轮和后轮组成,巡检机械臂安装在移动台质心位置。电网巡检机械臂结构如图2所示。

图2 电网巡检机械臂结构示意图
电网巡检机械臂由两个连杆A、B组成,其绞点位置存在两个驱动马达,负责控制连杆A、B转动。电网巡检机械臂的移动台前轮和后轮仅滚动不可滑动,依据该前轮和后轮与地面的非完整性约束[4],建立涵盖驱动电机动态特征的电网巡检机械臂动态方程,其表达式如式(1)、式(2)所示。


将式(2)参数代入到式(1)并对其求导后,将结果代入到式(3)内,再利用ST(q)左乘式(3),得到电网巡检机械臂动力学表达式如下:
由于电网巡检机械臂在运作过程中存在不确定性的外部干扰[5],或机械臂自身参数存在误差,导致式(8)计算结果不够准确。充分考虑外界干扰因素,对式(8)改写如下:

式(13)中,T表示已知外界干扰参数。
至此电网巡检机械臂多源数据模型构建构建完成,依据该模型输出的电网巡检机械臂当前参数,设计其滑模控制器,以实现电网巡检机械臂滑模控制。
1.2.2 自适应滑模控制器设计
将电网巡检机械臂多源数据模型输出的机械臂当前运作参数作为输入,设计模糊自适应滑模控制器,利用该控制器控制电网巡检机械臂运作。模糊自适应滑模控制器设计步骤如下:
令x1、x2均表示电网巡检机械臂状态空间变量,设置机械臂跟踪控制误差如式(14)所示。

式(14)中,r表示电网巡检机械臂给定参考轨迹数值。
设置机械臂滑模控制虚拟误差如式(15)所示。

式(15)中,α表示机械臂虚拟控制量,其表达如式(16)所示。

式(14)中,r表示机械臂轨迹参考轨迹一阶求导;c1表示对角正定常数矩阵。
依据式(14)结果,选择正定Lyapunuv函数如式(17)所示:

式(17)求导后,将式(14)~(16)数值代入其中,则正定Lyapunuv函数改写如式(18)所示。
对式(19)简化处理,则有:


上述式(32)中,ρ、k均表示正常数对角矩阵。
依据式(31)和式(32)结果,设计电网巡检机械臂滑模控制器如下:
2 实验分析
以某区域输电线路巡检的碳纤维机械臂作为实验对象,使用可视化测试软件模拟其巡检环境后,使用本文方法对该机械臂展开测试控制,然后使用图表等可视化形式呈现给用户。
在测试软件内设定电网巡检机械臂给定轨迹,测试模拟本文方法应用前后该电网巡检机械臂运动轨迹,结果如图3所示。
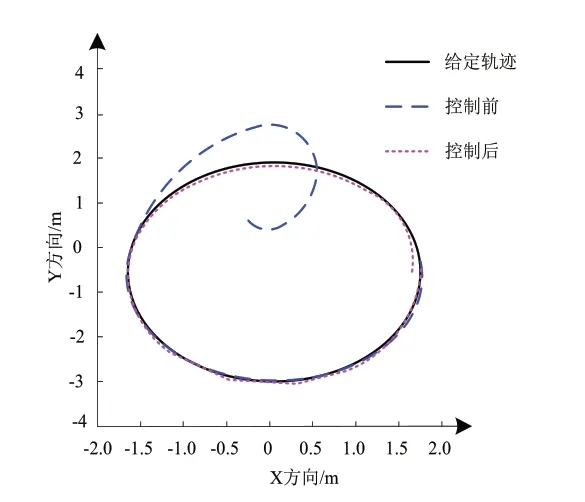
图3 电网巡检机械臂运动轨迹滑模控制效果
分析图3可知,在测试软件内给定的电网巡检机械臂运动轨迹呈椭圆状,而未使用本文方法对该机械臂控制时,该机械臂运行轨迹在X方向上与给定轨迹几乎相同,但在Y方向上与给定轨迹相差较大,其中最大偏差约为1.5m。而使用本文方法对该机械臂滑模控制后,该电网巡检机械臂运动轨迹在Y轴方向与给定轨迹完全重合,仅在X轴方向上存在轻微偏差,差值仅为0.1m左右。上述结果说明本文方法具备较强的电网巡检机械臂滑模控制效果。
当电网巡检机械臂在巡检过程中存在外界干扰时,对机械臂跟踪控制误差影响较大,测试电网巡检机械臂的不确定项估计值不同时,本文方法在控制电网巡检机械臂过程中的跟踪误差控制效果,结果如图4所示。

图4 跟踪控制误差值
分析图4可知,本文方法在控制电网巡检机械臂时的跟踪控制误差在其不确定估值为0.1之前呈现波动趋势,当不确定相估值超过0.1后,本文方法控制电网巡检机械臂时的跟踪控制误差始终保持为0。该结果说明当巡检机械臂在运作过程中若出现不确定相时,本文方法可迅速对其控制,使跟踪控制误差迅速保持0,具备较强的滑模控制能力。
测试本文方可控制电网巡检机械臂驱动电压效果,在matlab测试软件内设置巡检机械臂驱动电压波动情况,使用本文方法控制电网巡检机械臂驱动电压,控制效果如图5所示。

图5 电压控制效果
分析图5可知,当电网巡检机械臂存在电压波动干扰时,其电压波形分布区间较大,且波动情况较为明显。而使用本文方法控制该机械臂后,其电压波形呈现稳定状态,且分布区间始终为6.5V至23.5V之间。该结果说明:本文方法可有效控制电网巡检机械臂电压稳定,且不受电压波动干扰,具备良好的应用性。
以机械臂的A连杆、B连杆为实验对象,从控制电网巡检机械臂力矩角度对本文方法展开验证。以控制电网巡检机械臂力矩的均方误差作为衡量指标,并设置在不同不确定相估值情况下,控制机械臂力矩的均方误差阈值为0.003。测试结果如表1所示。

表1 机械臂力矩控制均方误差
分析表1可知,本文方法控制电网巡检机械臂力矩时的均方误差值与其不确定相估值成正相关关系。机械臂在不确定相估值为0.8时,连杆A和连杆B的控制力矩均方误差数值分别为0.0021和0.0020,该数值均较所设均方误差阈值低,其说明本文方法控制电网巡检机械臂力矩能力较好。
3 结语
本文研究基于多源大数据可视化的电网巡检机械臂滑模控制方法,并将该方法应用到某电网巡检机械臂运作过程中,以测试软件形式验证了该方法的实际应用性,同时使用大数据可视化形式呈现了验证结果。实验结果说明:该方法具备较好的电压控制效果和机械臂力矩控制效果,也不受机械臂运作过程中存在电压波动影响,其应用效果极佳。
猜你喜欢
世界科学技术-中医药现代化(2022年3期)2022-08-22
北京测绘(2022年6期)2022-08-01
大电机技术(2022年2期)2022-06-05
中学生数理化(高中版.高考数学)(2022年4期)2022-05-25
师道·教研(2022年1期)2022-03-12
北京测绘(2021年7期)2021-07-28
读友·少年文学(清雅版)(2020年4期)2020-08-24
读友·少年文学(清雅版)(2020年3期)2020-07-24
北京航空航天大学学报(2017年4期)2017-11-23
北京航空航天大学学报(2016年7期)2016-11-16
