
基于改进A*算法的消防机器人路径规划算法研究
2022-05-25 14:08李志伟李明宇谢家顺
华北科技学院学报 2022年1期
王 迪,黎 冠,李志伟,李明宇,谢家顺
(1.华北科技学院 安全工程学院,北京 东燕郊 065201;2.华北科技学院 电子信息工程学院,北京 东燕郊 065201)
0 引言
森林、高层建筑及危化品等火灾事故的发生,往往具有较大的破坏性,其造成的后果也普遍较为严重,近年来,天津港爆炸事故、四川凉山深林火灾等事故的发生,均造成了消防救援人员的巨大伤亡和不同程度的经济损失,给消防救援工作带来了巨大高效地开展何进一步快速、高效的开展消防救援工作,也成为了消防救援工作面临的主要问题。随着智能机器人技术的发展,一些具备自主移动、自主探测能力的消防机器人逐渐应用到消防领域当中[1],并逐渐在消防救援中承担重要的角色。当出现火情时,消防机器人可快速深入到火源位置,及时扑灭火源,并配合消防救援人员开展现场火情勘察和人员搜救等工作,可进一步提高消防救援效率和保障消防救援人员的人身安全。
在消防机器人领域,路径规划算法作为消防机器人研究的重要方面,合理的路径规划策略可确保消防机器人安全、快速地进行救援和灭火工作,最大限度地减少人员伤亡和财产损失[2]。目前,常用的全局路径规划算法主要包括随机采样算法[3-4]、图搜索算法[5-6]和一些智能算法[7-9]等。本文将传统A*算法应用于消防机器人的路径规划中,但随着环境复杂度的增高,传统A*算法规划的路径结果中转折点较多,搜索效率明显下降。并且传统A*算法未能结合机器人本身的体积、物理学状态等因素,在实际使用过程中,需对其路径做进一步改进,以避免机器人与障碍物发生碰撞。在消防机器人路径规划算法的研究中,何光层[10]等利用改进A*算法解决室内智能消防机器人的全局路径规划问题。王宏北[11]等针对地形复杂,地貌特征易变的火场中消防机器人的路径规划问题,利用自适应改进蚁群算法来获取火场中的最优路径。
综上,本文针对消防机器人领域,利用传统A*算法导致的路径规划结果中存在过多转折点、搜索效率较低等问题,对传统A*算法的搜索邻域和轨迹方面进行改进,在邻域搜索阶段,将邻域子节点进行分级,依据优先级进行搜索,从而避免斜穿顶点问题的发生,使结果更符合实际环境要求。并利用改进Floyd算法去除冗余的转折点,增强路径的平滑性,进一步确保消防机器人路径规划结果的可行性。
1 传统A*算法
传统A*路径规划算法作为一种启发式搜索算法,常用在全局地图中搜索两点之间的最短路径。在A*算法的实现原理中,搜索区域被简化成一个二维数组,路径被描述为从起始栅格至终点栅格经过的所有栅格的集合,栅格的中心点则为节点n。A*算法的搜索方向是根据代价估算函数F(n)来确定的,如公式(1)所示,搜索过程中通过代价估算函数F(n) 来判断区域内当前点至目标点的距离,进而决定搜索方向。具体实现过程中,需要建立开启列表和关闭列表,开启列表中存储着所有可能出现在最终路径中的节点,关闭列表中存储着已检测并且不需要再次检测的节点。路径搜索过程中,首先需选取当前开启列表中F(n)值最小的节点,然后将其从开启列表中删除,再添加到关闭列表中,最终路径也将在关闭列表中产生。
F(n)=g(n)+h(n)
(1)
式中,F(n)为节点n的代价估算函数;g(n)为机器人从起始节点至当前节点n所花费的实际代价,一般情况下由当前节点的父节点的实际代价值得到;h(n)为启发函数,表示机器人从当前节点n至目标节点将要花费的预估代价。在传统A*算法中,分别采用曼哈顿距离与欧氏距离表示h(n)大小,两种表示方式如式2、3所示。
(2)
h(n)Manhattan=|xn-xt|+|xn-xt|
(3)
式中,xn,yn分别为当前节点n所处栅格的横坐标、纵坐标;xt,yt分别为目标节点所处栅格的横坐标、纵坐标。
2 改进A*算法
2.1 基于优先级的邻域搜索方法
在路径搜索的过程中,传统A*算法将机器人视为一个质点,未考虑机器人的体积等因素,其中,图1所示为一组传统A*算法规划的路径结果,该路径结果中,红色圆点位置出现路径斜穿障碍物顶点的问题,在实际使用A*算法的过程中,出现该问题时,机器人存在一定的安全风险。因此,为避免该问题的发生,本文对传统A*算法的搜索方向进行调整,将邻域中的节点划分优先级,分为优先组与普通组,如图2所示,N、E、S、W四个方向为优先组,其余NE、NW、SE、SW四个方向为普通组,在子节点的搜索过程中,首先对优先组中的子节点进行搜索,然后按照表1中的规则对普通组的子节点进行搜索。
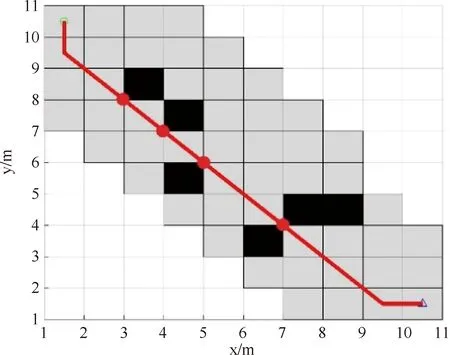
图1 传统A*算法路径规划结果图
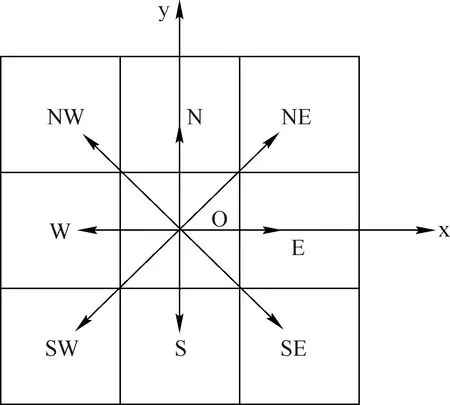
图2 邻域表示图
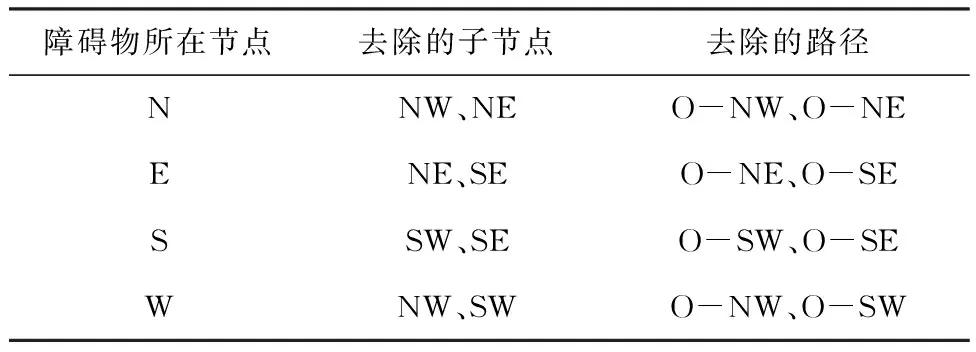
表1 普通组去除的子节点及路径
2.2 基于改进Floyd算法的轨迹优化方法
在路径的平滑性方面,随着区域内障碍物覆盖率的逐渐增加,传统A*算法规划的路径中存在较多的转折点,路径平滑性较差。因此针对此问题,本文将传统A*算法规划的路径做进一步的平滑处理,改善路径的平滑性。目前,常用的路径平滑处理算法有贝塞尔曲线以及Floyd算法等,Floyd算法作为一种基于动态规划方法的最短路径算法,又被称为插点法。在轨迹优化方面,常规的Floyd算法只进行从起始点至目标点的轨迹优化。本文采用一种基于改进Floyd算法的轨迹优化方法对路径进行平滑处理,该算法在常规Floyd算法的基础上,增加了从目标点至起始点的反向轨迹优化,采取双方向的轨迹优化方式,进一步增强路径的平滑度。除此之外,改进Floyd算法增加了碰撞距离检测,通过计算障碍物中心点与路径间的垂直距离,避免与障碍物发生碰撞。下面以图3为例,对改进Floyd算法的流程做具体阐述,其中S为起始点,T为目标点。
首先去除路径中冗余的节点,去除红色路径中除起始点S、目标点T及拐点以外的其他节点,如图3所示,去除后的路径为:S→n1→n2→n3→T。
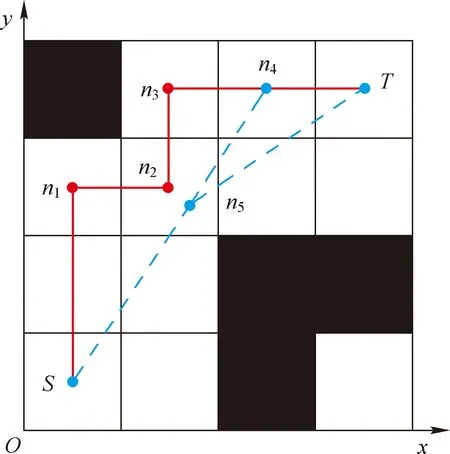
图3 改进Floyd算法示例图
然后进行正向的轨迹优化,轨迹优化阶段,设置步长为k,与障碍物安全距离为D。优化过程中,从起始点S开始,在上一步保留的路径中,相邻两个节点之间每隔k步长选取一个节点,判断选取节点与前端路径节点之间的路径是否有障碍物,并检测障碍物与路径的距离d,若d≥D,则该路径满足要求,否则不满足要求。此时,经前向轨迹优化后的路径可表示为:S→n4→T。
最后进行反向的轨迹优化,反向轨迹优化采用与正向轨迹优化相同的平滑处理方式,反向优化后路径进一步表示为:S→n5→T。
在障碍物距离检测方面,如图4所示,A、B为路径的起始点与终点,坐标分别为(xA,yA)、(xB,yB),AB与x轴之间的夹角为α,C为障碍物中心点,坐标为(xC,yC),点C至AB的垂直距离和纵向距离分别为d、e。因此,障碍物与路径的距离d可由A、B、C三点坐标表示为:
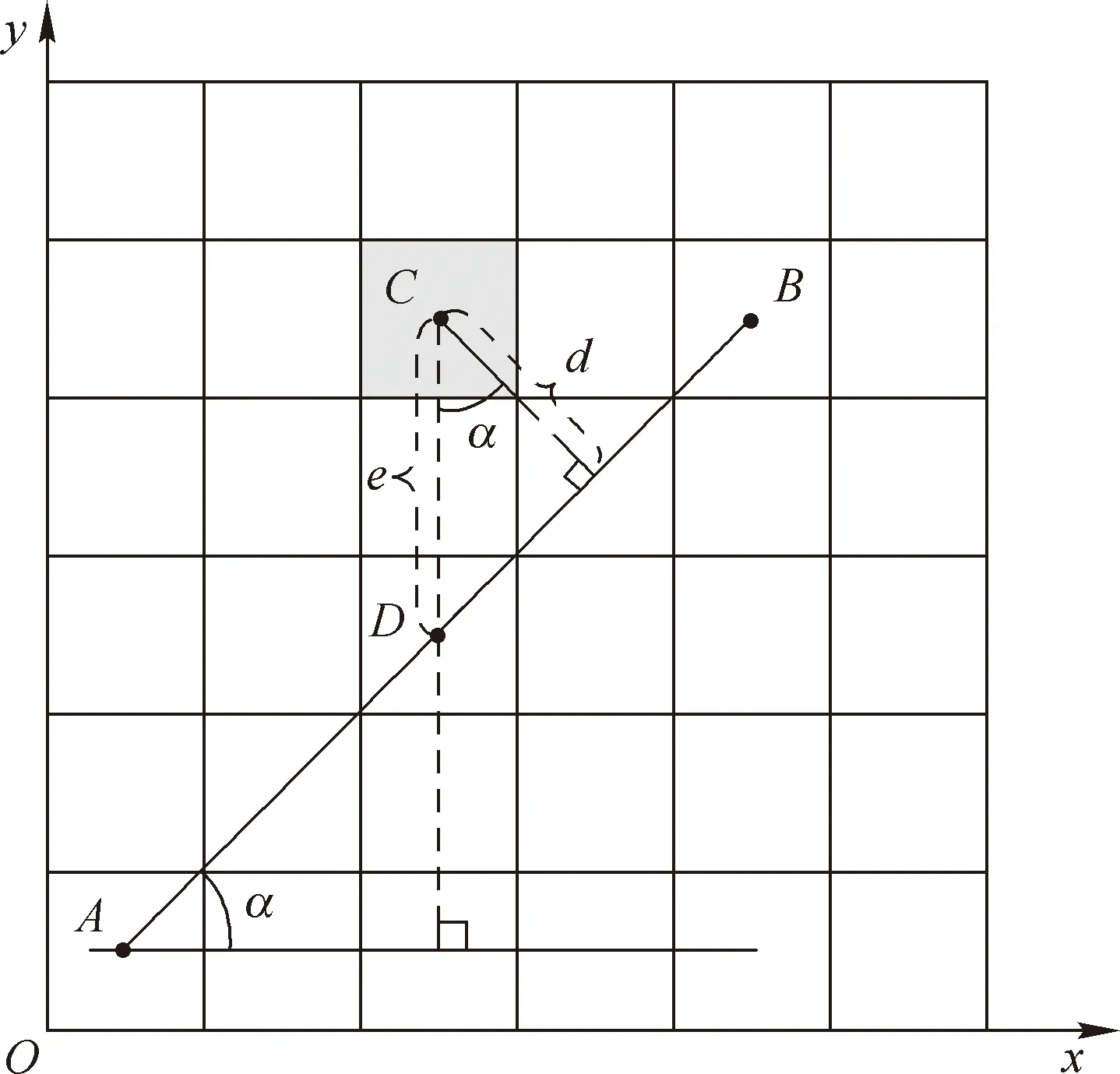
图4 障碍物距离图
d=e·cosα
(4)
其中,α、e可表示为:
(5)
(6)
根据栅格的大小,当d≥D时,表示该路径可选取,否则表示该路径不可选。
3 实验结果与分析
3.1 MATLAB仿真实验结果与分析
基于以上对改进A*算法的原理分析,本文对改进A*算法进行进一步的测试与分析,测试中使用的系统环境为Intel(R)Core(TM)i7-5500U CPU@2.40GHz Windows10专业版,软件环境为MATLAB 2019b。在障碍物覆盖率为10%、20%、30%的情况下,分别对传统A*算法、轨迹未平滑处理的改进A*算法以及轨迹平滑处理后的改进A*算法进行了测试。机器人均从左上角的起始点搜索至右下角的目标点,搜索结果分别如图5~图7所示。
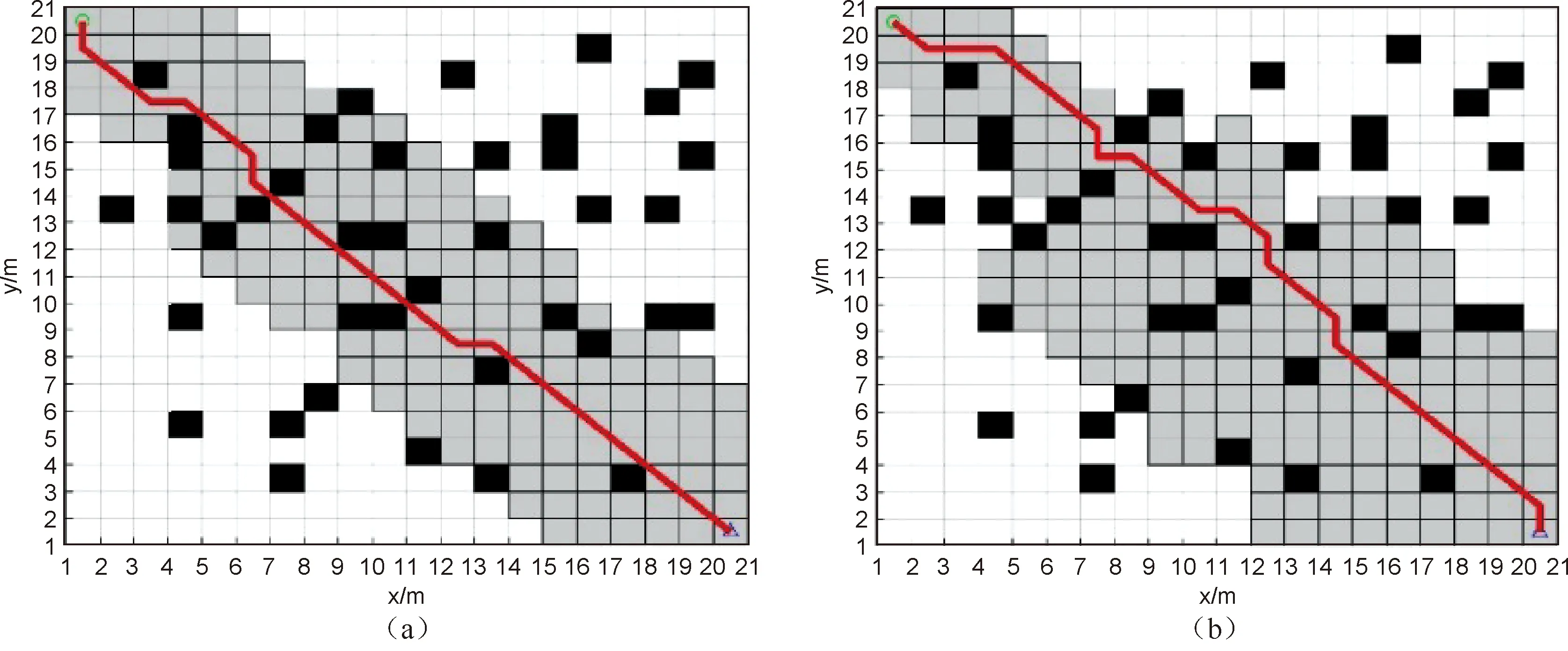
图5 仿真结果1(障碍物覆盖率10%)
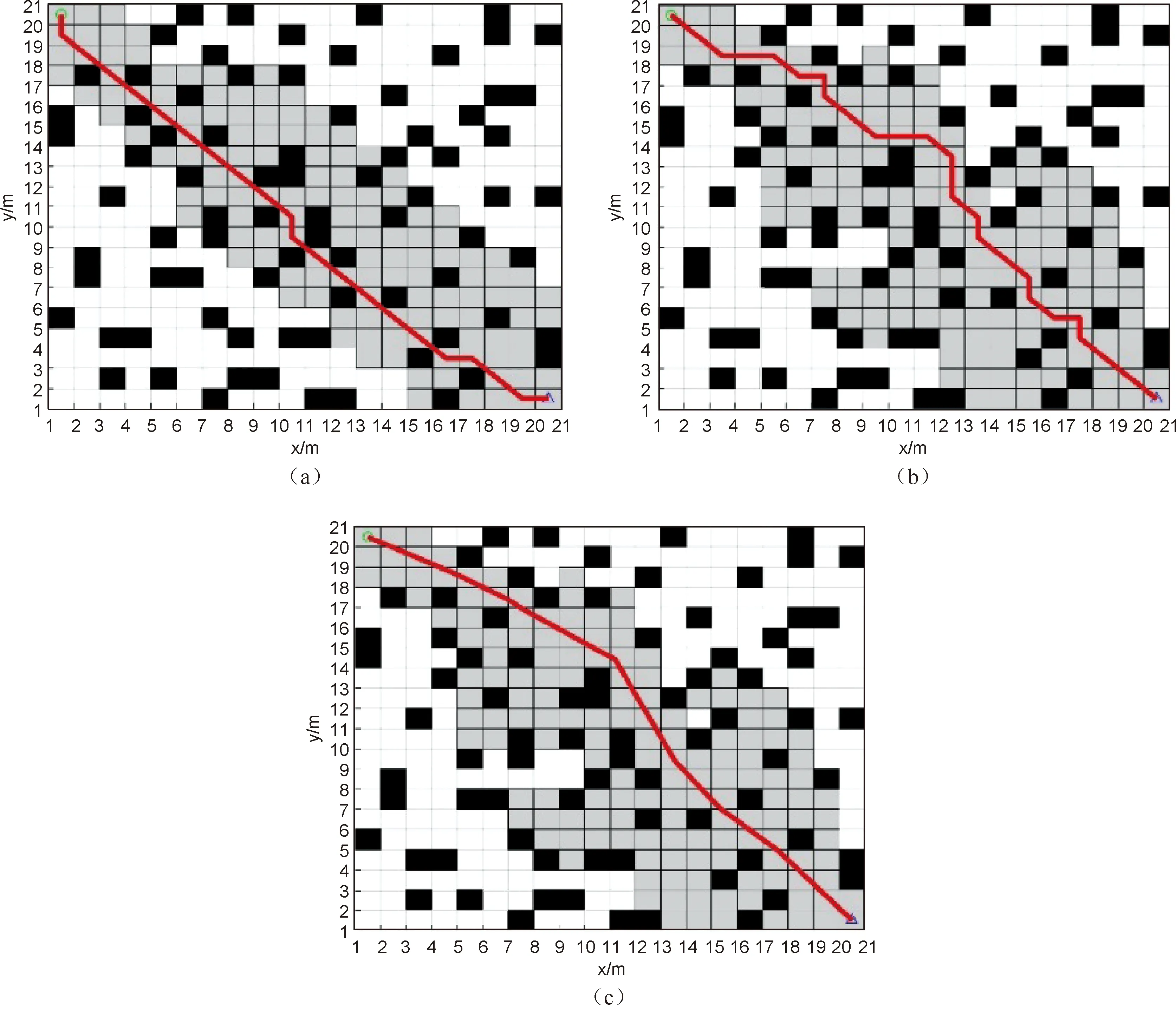
图6 仿真结果2(障碍物覆盖率20%)
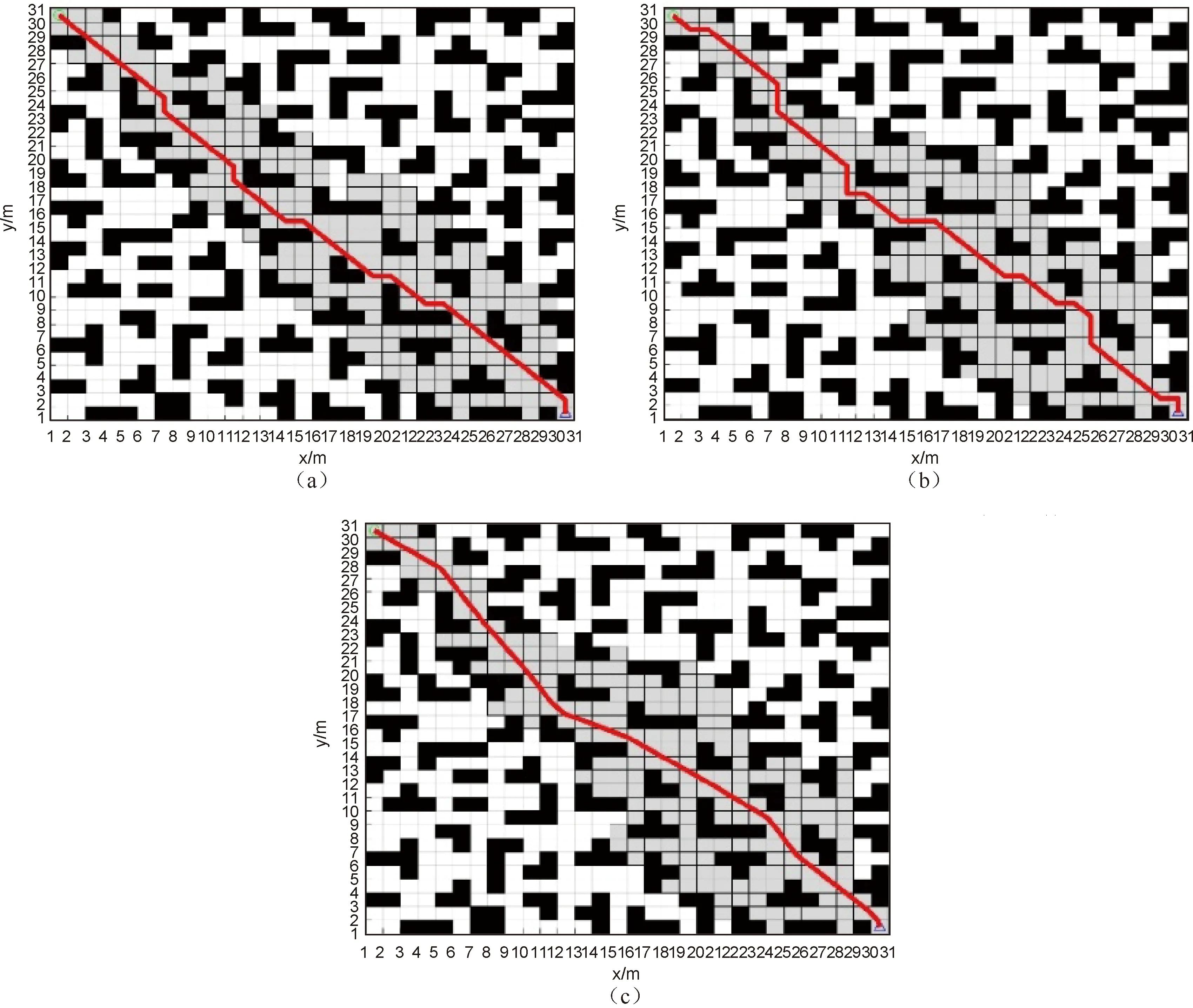
图7 仿真结果3(障碍物覆盖率30%)
从图中可以看出,三组测试均能规划出从起始点至目标点的全局路径,并且随着算法的逐步改进,路径规划的结果逐步改善,测试后的具体实验参数如表2所示。由表2可知,相比于传统A*算法,在转折点方面,每条路径中平均减少了62.49%的转折点数。在规划时间方面,平均提升了23.22%的搜索效率,在路径长度方面,平均减少了2.19%的路径长度。
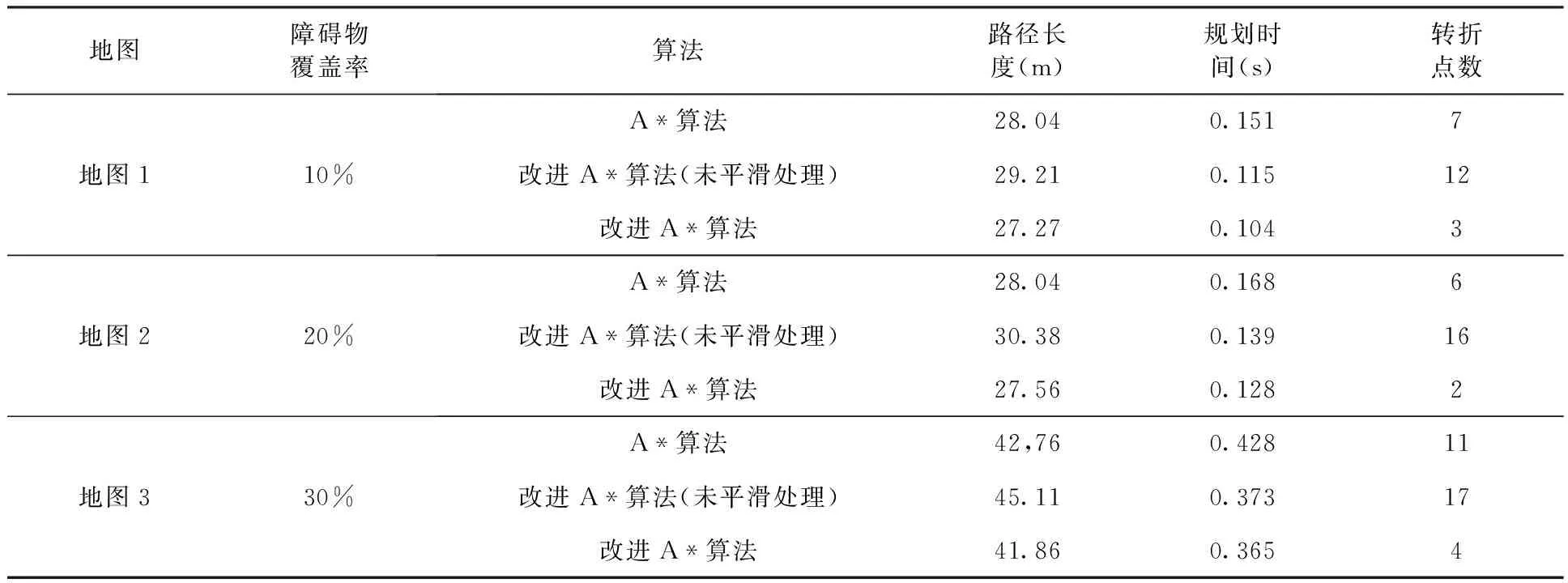
表2 具体实验参数
3.2 基于GAZEBO的室内消防救援实验结果与分析
为进一步测试改进A*算法在消防机器人中的应用效果,如图8所示。本文模拟实际的室内消防救援场景,利用GAZEBO仿真软件搭建了室内仿真环境和消防机器人模型,仿真环境整体长宽分别为30 m和20 m。结合ROS机器人操作系统,在构建完成的场景内平面栅格地图的基础上,利用Move_base导航框架,测试消防机器人消防灭火能力。

图8 室内仿真环境与消防机器人模型图
实验过程中,设定当室内发生火灾时,消防机器人从起始点开始,在指定需到达的起火点位置后,机器人便自主规划全局路径,并沿着该路径自主导航至起火点位置,及时扑灭火源,完成灭火任务。如图9、图10所示,分别为消防机器人利用传统A*算法与改进A*算法规划的全局路径。消防机器人导航过程中的相关数据见表3。

图9 传统A*算法路径规划效果图
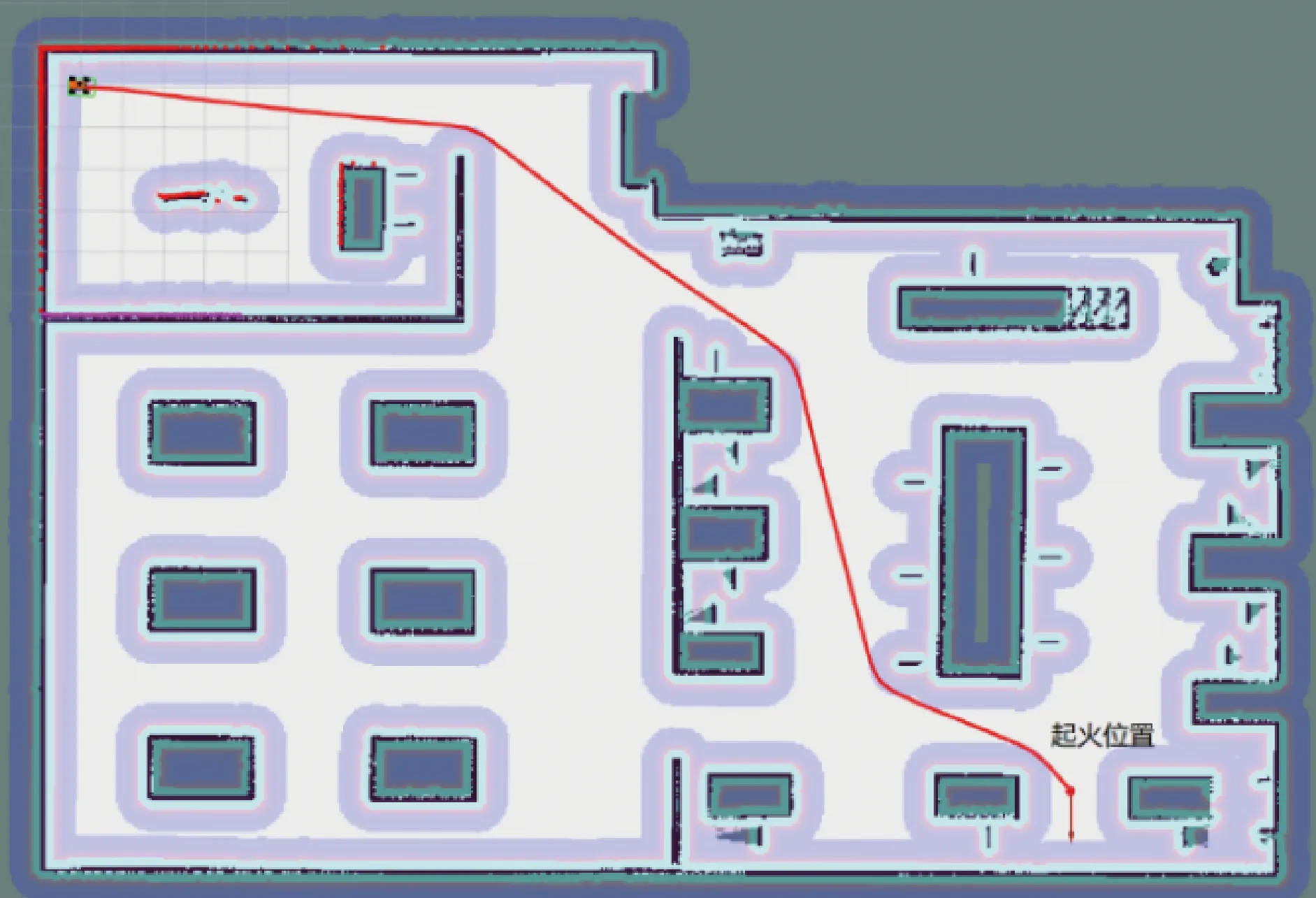
图10 改进A*算法路径规划效果图
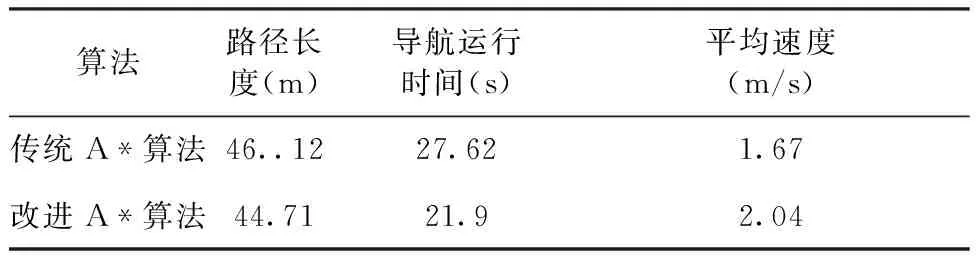
表3 消防机器人导航相关数据
通过图表可以得出,在应用方面,改进A*算法可以较好的改善消防机器人的全局路径规划效果,并且在导航过程中,利用改进A*算法,消防机器人的整体运行速度有所提升,运行较为平稳。
4 结论
(1) 利用基于优先级的邻域搜索方式,可有效提高算法的邻域搜索效率,同时也可避免路径中出现斜穿障碍物顶点的现象,使路径规划结果更加适用于实际的消防救援场景。
(2) 利用基于改进Floyd算法的轨迹优化方法,在减少路径中的转折点数的同时,也进一步减少了路径长度,有效提高消防机器人的路径规划效率。
(3) 通过两组仿真实验,有效验证了改进A*算法的可行性以及在室内救援场景中的实用性,在此研究的基础上,未来可进一步搭建消防机器人平台,结合相关局部路径规划算法,更为全面地测试消防机器人的实际消防能力。
猜你喜欢
消防界(电子版)(2022年18期)2022-10-29
中学生数理化(高中版.高考数学)(2022年4期)2022-05-25
小天使·一年级语数英综合(2020年11期)2020-12-16
读友·少年文学(清雅版)(2020年4期)2020-08-24
读友·少年文学(清雅版)(2020年3期)2020-07-24
动漫界·幼教365(中班)(2020年3期)2020-04-20
创新作文(1-2年级)(2019年4期)2019-10-15
消防界(2019年2期)2019-09-10
好孩子画报(2019年10期)2019-01-10
读者(2018年18期)2018-08-31
