SD振子的Hopf分岔研究*
2022-05-24 07:27王翠艳王明昊
机械工程与自动化 2022年2期
王翠艳,王明昊
(石家庄铁道大学,河北 石家庄 050043)
0 引言
振动现象在许多工程应用中都是有益的,如搅拌、低能量导航和控制、机电系统的监测和故障诊断等。通过控制策略产生Hopf分岔[1]是一种将有具体振动特性的系统设计为非线性动力学系统的方法,Hopf分岔自身则是一种从非双曲平衡点中产生极限环分岔的现象。PB(Poincaré-Birkhoff)规范型理论常被用于从解析角度研究Hopf分岔[2,3]。Li等[4]研究了含有双时滞参数的Lengyel-Epstein系统的Hopf分岔,使用时滞微分方程的规范型理论与中心流形定理,得到了确定周期解稳定性与Hopf分岔方向的显式表达式。Zhang等[5]研究了水下滑翔机姿态控制系统中由时滞引发的Hopf分岔现象,得到了产生Hopf分岔的临界时滞条件。Li等[6]研究了一类两物种共栖系统的Hopf分岔与稳定性。Zhang等[7]研究了一类时滞传染病模型的Hopf分岔与稳定性,使用规范型理论与中心流形定理得到了Hopf分岔方向与周期解分岔稳定性的显式算法。Somnath R等[8]研究了双简谐激励作用的双稳态van der Pol-Mathieu-Duffing系统的超临界Hopf分岔现象。
本文研究了SD(Smooth and Discontinuous)振子弹簧处于预拉伸状态时平凡解邻域内的Hopf分岔。使用多尺度法,得到了同时含有非线性黏性阻尼和简谐激励的平均系统。基于PB规范型理论,得到了Hopf分岔条件并研究了极限环的稳定性。随后使用上述方法,研究了系统弹簧处于预压缩状态时非平凡解邻域的Hopf分岔。
1 SD振子的Hopf分岔
近期的文献提出了可以实现光滑至不连续系统演化的SD振子,模型如图1所示。其中,x表示振子位移,l表示振子位移路径至弹簧固定点的距离(半跨距离),其无量纲无扰动的运动微分方程为:
(1)
其中:α为系统光滑参数,0<α<2。

图1 SD振子系统
该系统可以通过调整光滑参数α的值,实现从光滑系统到不连续系统的演化。当α=0时,其表现出不连续动力学行为[9,10],此时系统的半跨距离l=0,导致系统实际上难以实物化。当α>0时,系统表现出光滑动力学行为。当α=1时,该系统对应具有余维2分岔现象的单自由度弦振动模型。如文献[11]所示,当α>1时,该系统类似于一个预拉伸的离散弹性弦。

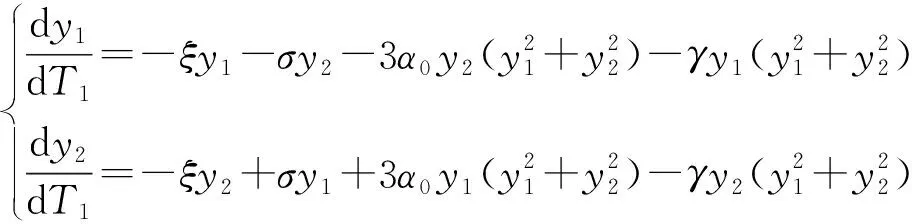
假设系统(1)受非线性黏性阻尼f(x)=ξ+γx2和一个幅值为F0、频率为Ω的简谐激励扰动。此时,该受迫耗散系统可以表示为:
(2)
其中:为了表示广义非线性阻尼且不失一般性,ξ、γ可以取为任意实数;t为扰动时间。
为了得到平衡点(0,0)附近的平均方程,使用多尺度法,系统(2)可以改写为:
(3)
设ε是一个小尺度扰动参数,取变换:
(4)
将式(4)代入系统(3),整理后可得:
(5)
假设系统(5)的解x可以由多个时间尺度表示:
x(t,ε)=x0(T0)+εx(T0,T1)+
ε2x(T0,T1,T2)+….
(6)
其中:Ti=εit,i=0,1,2,…。
根据多尺度法,定义微分算子如下:
(7)
(8)

下面,重点研究系统产生1∶2内共振的情况。这种共振情况下,存在如下频率关系:
(9)
其中:σ为调谐参数。为了便于分析令Ω=2。因此:
ω2=1+εσ.
(10)
将式(6)~式(10)代入系统(5),令方程左侧和右侧的ε同幂次系数相等,可得:
ε0时:
(11)
ε1时:
(12)
系统(11)的1次近似复数解的形式可以表示为:
(13)
将式(13)代入系统(12),可得:
(14)
其中:cc为系统(14)右侧函数的共轭;NST为不包含久期项的部分。
为了消除系统(14)中的久期项,由式(14)可得:
(15)
A可以表示为笛卡尔形式:
A=y1+jy2.
(16)

(17)
显然,(y1,y2)=(0,0)是平凡解,系统(17)为ξ=0时的PB规范型。系统(17)线性化导算子的特征值为:
λ1,2=-ξ±jσ.
(18)
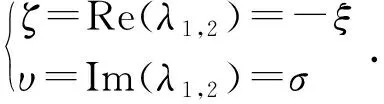
(19)
根据Poincaré-Andronov-Hopf定理,可得:

(20)

结合式(20)和文献[3,4],可以通过ζ、υ、d和c的值来判断奇点的类型与极限环的稳定性。
2 结果分析
研究各种参数情况下式(20)的结果,可得系统(2)的奇点类型与极限环稳定性。使用MATLAB对系统(2)进行数值模拟,结果如图2~图4所示。
(1) 当γ<0时,对于ξ<0该平凡解是一个不稳定焦点,ξ>0时其为一个渐进稳定焦点,并且存在一个不稳定极限环。当γ<0时,出现亚临界Hopf分岔,如图2(a)所示。
(2) 当γ>0时,对于ξ>0该平凡解是一个渐进稳定焦点,ξ<0时其为一个不稳定焦点并且存在一个渐进稳定的极限环。当γ>0时,出现超临界Hopf分岔,如图2(b)所示。

图2 系统(2)在平衡点(0,0)邻域的Hopf分岔
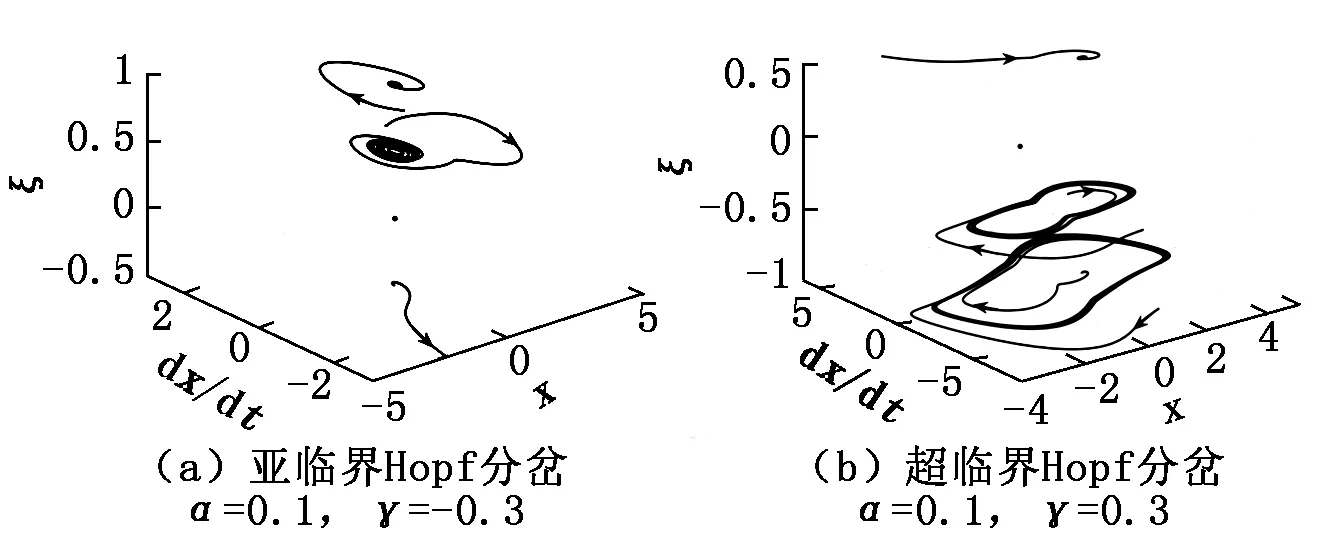
图3 系统(2)在平衡点邻域的Hopf分岔

图4 系统(2)在平衡点邻域的Hopf分岔
图2(a)、图3(a)和图4(a)分别描述了ξ变化时亚临界Hopf分岔现象。图2(b)、图3(b)和图4(b)描述了超临界Hopf分岔。图2~图4中亚临界Hopf分岔与超临界Hopf分岔对应的参数情况与式(20)结果一致,这表明解析解与数值计算结果一致,1∶2内共振条件下SD振子Hopf分岔定性分析结果正确。
3 结论
本文针对SD振子,研究了系统的超临界、亚临界Hopf分岔及其稳定性。从平衡点研究出发,探讨了平凡平衡点、非平衡点邻域的复杂非线性动力学行为。利用多尺度法求得系统平均方程,探讨了平凡平衡点、非平衡点邻域的超临界、亚临界Hopf分岔。利用PB规范型理论分析了所有平衡点极限环分岔的稳定性。进一步地,利用数值模拟的结果验证了解析结果的正确性。
猜你喜欢
现代信息科技(2022年8期)2022-08-12
吉首大学学报(自然科学版)(2022年1期)2022-08-10
闽南师范大学学报(自然科学版)(2021年3期)2021-10-19
烟台大学学报(自然科学与工程版)(2021年1期)2021-03-19
北京航空航天大学学报(2020年10期)2020-11-14
物理学报(2019年12期)2019-06-29
北方工业大学学报(2019年5期)2019-03-30
学校教育研究(2018年4期)2018-10-21
上海师范大学学报·自然科学版(2018年3期)2018-05-14
IT时代周刊(2015年7期)2015-11-11