
双创背景下“工业机器人系统集成”课程改革与实践
2022-05-24 07:51王丹陈雷韦翠华
科技风 2022年12期
王丹 陈雷 韦翠华


摘 要:在对“工业机器人系统集成”课程教学现状及问题分析的基础上,提出基于“双创”背景下的课程改革方案,包括教学内容,竞赛机制,教学手段,考核方案四方面内容;其次,根据课程改革方案,完成课程改革实践,主要包括综合性项目设计和创新性项目设计;通过改革和实践,在师资队伍建设方面,提升了工业机器人系统集成领域教师实践能力;在教学效果方面,提高了学生的兴趣,同时帮助其搭建了知识体系,培养了创新能力与团队协作能力。
关键词: 双创;工业机器人;课程改革;
中图分类号:G642.0 文献标识码: A
Curriculum reform and practice of industrial robot system integration under the background of "entrepreneurship and innovation"
WangDan ChenLei WeiCuihua
Guangdong University of Science &Technology GuangDongDongguan 543002
Abstract: Based on the analysis of the current teaching situation and problems of "industrial robot system integration", this paper puts forward the curriculum reform scheme under the background of "mass entrepreneurship and innovation", including teaching content, competition mechanism, teaching means and assessment scheme. Secondly, according to the curriculum reform plan,this paper completes the curriculum reform practice, mainly including comprehensive project design and innovative project design. Through reform and practice, the practical ability of teachers in the field of industrial robot system integration has been improved in the construction of teaching staff.In terms of teaching effect, it improves students' interest, helps them build a knowledge system and cultivates their innovation ability and teamwork ability.
Keywords: Mass entrepreneurship and innovation; Industrial robot; Curriculum reform
“工業机器人系统集成”是机器人工程专业的一门专业课,是实践性、综合性和创新性均要求较高的课程[1]。它主要解决工业机器人系统方面相关问题,该课程的教学改革问题是智能制造类相关领域学者广泛关注的问题[2]-[3]。2015年3月,国家总理提出把“大众创业、万众创新”打造成推动中国经济继续前行的双引擎之一[4],双创教育在此背景下,应运而生。双创教育是以学生为主体,以教学模式改革为内容,实现提升学生创新创业能力为目标的教育理念[5]。本文从课程教学现状及双创背景下的课程改革方案与实践详细介绍我校机器人专业“工业机器人系统集成”课程改革与实施经验。
1 课程教学现状
我校机器人工程专业于2018年开始招收第一届本科生。“工业机器人系统集成”课程首次设置于《2018版机器人工程专业本科生培养方案》中,为我校机器人工程专业专干专业课之一。在培养方案中,本课程总学时48学时,均为理论学时,授课时间安排在大四第一学期。本课程于2021年7月参与校企协同育人“人职匹配”项目,目前存在的问题有:
(1)课程教学内容有待优化。在本课程教学中,根据教学大纲安排,48学时主要对工作站组成,工作站应用进行认知性学习,缺乏创新性、综合性的引导实践内容的教学。
(2)课程教学方法主要为理论教学,虽然在理论教学中融入了案例教学法,启发式教学,但总体以理论教学为主,辅助设备为投影仪和视频动画,教学手段比较单一,学生学习效率较低。且由于没有引导性实践项目,学生对理论知识容易产生畏难情绪。
(3)课程考核方式侧重期末考试成绩。总成绩=平时成绩*40%+期末成绩*60%。平时成绩包括考勤,平时作业,课堂表现等。期末成绩主要包括期末闭卷考试。这种模式的课程考核对学生实践技能和创新性能力要求较低,学生平时学习积极性较弱,会在期末考试前进行突击,不重视平时学习过程。
(4)师资队伍实践能力偏弱。由于本课程属于实践性、创新性要求较高的课程,对师资队伍的实践能力要求较高,同时工业机器人系统集成涉及的技能较多,综合性强。而目前师资队伍侧重于科研和基础学科方面的教学,与目前“工业机器人系统集成”课程匹配度偏弱,因此急需要打造一支具有在工业机器人领域理论和实践均比较出众的团队[6]。
2 课程改革方案设计
2.1 优化教学内容
根据工业机器人行业工作岗位需求,构建基于“双创”的教学内容,结合工业机器人系统组成与集成设计相关理论和技能[7],对本课程的教学内容进行优化。如下图1为工业机器人课程方案总图,本课程针对的是工业机器人课程总图中广义工业机器人的系统开发。以工业机器人简易工作站设计全过程为主线,从总体布局,元器件选型,电气设计,软件设计,综合运用等5大专题来全面学习工业机器人集成相关内容,帮助学生搭建工业机器人集成方向的知识体系,提升学生的实践能力,同时在项目中融入开放性模块,培养学生创新能力。
2.2 引入竞赛机制
以项目为导向的课程内容在开展过程中,引入小组竞赛的方式[8],提升学生的积极性与参与度。在小组竞赛过程中,学生通过自由组队,分工协作,提升自身团队协作意识和自主创新能力。
2.3 改进教学手段
以“工业机器人系统集成”领域的企业案例为基础,课程师资团队在5大专题框架下提炼出若干子项目,以实际项目引导学生学习,理论与实践分别为12学时与36学时,将学时向实践项目倾斜,大力提升学生实践能力。
2.4 优化考核方式
课程改革采用“项目实施+案例研讨+理论考试”方式,实现课堂全过程形成性评价的考核。形成性评价主要是记录学生参与混合式教学每项教学活动,记录学生学习轨迹,对这些学习活动做出定性或定量评价。本课程形成性评价主要包括学生课堂表现评价,主题讨论评价,课程项目评价,课堂考勤评价。其中课堂表现环节形式多样化,有抢答,竞赛,开放式问答,头脑风暴等形式,充分提供多样化与个性化的互动模式,尽可能让同学们都能参与积极参与课堂学习中。结果性评价主要包括期末理论考试和期末实操考试。项目实施过程体现了学生自我解决问题的能力;案例研讨过程体现了学生创新能力,团队写作能力;理论考试体现了学生理论分析能力。通过三方面的考核,提升学生在工业机器人领域的综合能力。
2.5 师资培训
组织相关师资团队参与企业培训,主题为工业机器人及机器视觉技术、工业机器人集成系统开发、工业机器人综合应用等。同时选拔综合实力较强的老师驻派企业,参与企业工业机器人相关的项目研发,为课程改革积累实践项目经验。为了激励教师团队参与企业项目,将师资团队参加企业培训与挂职纳入年终绩效考核。
3 工业机器人系统集成课程改革实践
3.1 综合性项目设计
针对《工业机器人系统集成》课程中覆盖的核心技术,根据由难到易的原则,设计4个专项课题,包括系统认知专题、电气专题、控制专题、综合运用专题,如表1所示。课程采用的设备主要由电气安装模块、电机调试模块、单轴运动控制模块、双轴运动控制模块、三轴运动控制模块、流水线模块和底架等部分組成。在各专题中通过细分,共有13项子项目。其中在工业机器人系统认知、电气元器件原型、伺服电机三环调试子项目中融入课程思政内容,让学生了解我国工业机器人产业发展现状,国产核心零部件品牌,国产电机性能优势等。
3.1.1 系统认知专题
该专题共有2个子项目,共4个学时。子项目包括工业机器人总体架构和电机运动模式。涉及的知识点有:工业机器人组成、工业机器人传感器分类与作用、控制器分类与选型、运动控制环路组成、电机选型方法、电机运动模式选择等,学生通过项目学习,掌握工业机器人系统的总体架构和组成,掌握电机的运动模式,为后续项目学习做铺垫。
3.1.2 电气专题
该专题共有4个子项目,共12学时。通过该专题学习,让学生掌握工业机器人集成系统电气组成,电气模块选型,电气设计,电气连线,电机三环调试等内容。在电气专题,学生需要掌握电子元器件的原理与选型,断路器与继电器、控制器和变频器的接线方式,电气原理图绘制方法;运动控制卡的安装与调试软件使用方法;在电机三环调试项目中引入PID控制器对电机参数性能的影响分析,要求学生利用自动控制原理的理论知识分析实验参数,有利于提升学生理论与实践结合的能力,同时提升学生学习理论课程的兴趣。
3.1.3 控制专题
该专题共有4个子项目,共12学时。通过该专题学习,让学生掌握工业机器人控制系统开发过程,开发技术,运动模块软件设计等内容。硬件设备主要包括为单轴控制模块,双周控制模块,三轴控制模块和流水线模块。
Jog、PT、电子齿轮等运动模式的原理及控制在单轴运控模块上可实现,同时可以通过设定位置指令和标尺比对完成对定位精度的测量实验。最终学生可以具备独立完成轴运动参数、控制器参数调整和优化的能力。双轴运动控制模块主要用于进行二轴电子齿轮、点的合成运动规划、手轮脉冲运动控制、二轴回零控制程序设计、二轴轨迹插补算法研究、电子凸轮,插补运动等运动控制策略类项目。三轴运动模块主要用于进行多轴插补运动以实现吸盘对样件的抓取和激光笔的绘图实验;三轴回零程序设计;三轴码垛轨迹插补运动控制系统设计;三轴激光雕刻控制系统设计;前瞻规划优化插补轨迹实验。流水线模块,学生根据任务书,完成流水线模块电气设计,电气选型,控制卡选型,控制器资源分配,控制器程序设计,可以掌握运动控制中的控制流程,IO模块的使用方法,具备综合解决机器人集成控制系统的基础开发能力。
3.1.4 综合运用专题
该专题有1个子项目,共8学时,该专题需要学生自主完成工艺分析,控制系统模块化实现,通过该项目,学生可以将工业机器人系统集成的主要技能融会贯通,达到独立设计简易集成项目的目的。
3.2 创新性实训项目设计
工业机器人系统集成应用平台由多种模块组成,包括惯量匹配模块,传感器特性模块,动态跟踪模块,伺服驱动模块,流水线模块等。学生根据实际项目,自由选择模块组合,自行确定工艺和控制方案,完成工业机器人集成系统的单元改造项目。
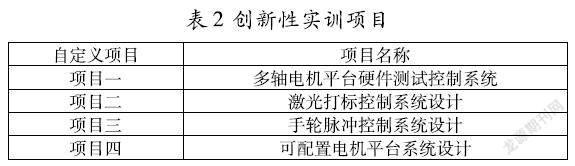
目前2018级工业机器人专业已完成的创新型、开放性项目如下表2,项目为学生自主设计。
4 课程改革效果
4.1 师资队伍建设
通过该项目,有2位老师申请到参加2020年第一批教育部产学合作协同育人师资培训专题项目的機会,项目专题为“智能制造师资队伍教学能力培养模式探究”。有1位老师成功申报2020年第二批教育部产学合作协同育人师资培训专题项目,项目名为“机器人方向师资培训探索与实践”。有1位老师驻派企业,参与企业项目“蓝宝石内平面抛光机控制系统设计”。
4.2 教学效果
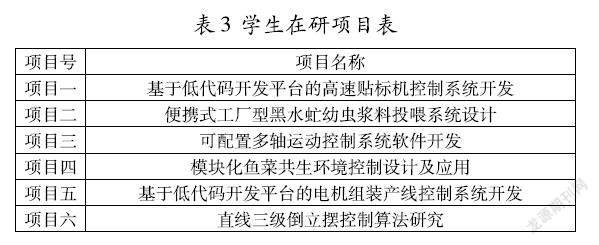
在专题训练中,电气专题中电气元器件选型项目难度较大,需要学生具备扎实的理论计算功底和实践经验,通过本专题训练,学生将理论知识在实践中应用,促进了学生理论和实践两方面的提升。控制专题需要学生将工业机器人系统集成领域的机械、电气和软件各方面综合应用,对学生的发现问题,解决问题,逻辑思维能力有较好的训练。通过综合运用专题训练,学生可以完整的理解工作站设计工艺和加工工艺,综合实践能力得到提升,同时学生对工业机器人领域的兴趣得到提升。2021年7月,6名同学通过面试,成功参与首届固高创工场训练营,18名同学参与校企协同育人“人职匹配”项目。如下表3为学生参与企业研发项目名称。
参考文献:
[1] 刘东海,蒋思中,彭宇林.《工业机器人系统集成及维护》课程建设调研报告[J].高教论坛,2017(05):70-72.
[2] 高飞,管建峰,易风,郭兰中.新工业体系下的机器人课程改革探索[J].中国现代教育装备,2018(05):26-27+39.
[3] 那亚莉,刘媛媛.智慧课堂教学策略初探——以“工业机器人工作站系统集成”课程为例[J].工业和信息化教育,2021(05):89-94.
[4] 王含,黄蕊.“大众创业、万众创新”视角下中小企业参与创新创业途径研究[J].长春理工大学学报(社会科学版),2019(03):100-104.
[5] 项贤明,范先佐,周满生,辛涛,朱益明,宋乃庆,裴娣娜,王世伟,毛亚庆,刘学智,陈云英,吴璀,孙刚成,蒋平. 探索新时代创新创业教育[J]. 教育与教学研究,2019,33(11):97-129.
[6] 张晓玲,罗秋兰.“双师型”教师认证标准研究:基于教师专业发展的视角[J].中国职业技术教育,2019 (27):36-40.
[7] 陈盛. 工业机器人实训中心系统集成技术的应用研究[D].电子科技大学,2016.
[8] 权宁.工业机器人专业“以赛促学、以赛促教”培育研究[J].科技风,2020(30):37-38.
基金资助:2020年广东科技学院高等教育教学改革项目(CQ2020095);2021年广东科技学院校级教学质量与教学改革工程项目专项人才培养计划(GKZLGC2021023)
作者简介: 王丹(1987— ),女,湖北宜昌人,讲师,硕士,研究方向:智能制造控制系统、信号处理。
猜你喜欢
现代职业教育·高职高专(2022年16期)2022-05-05
中共乐山市委党校学报(2019年6期)2020-01-08
瞭望东方周刊(2018年4期)2018-02-01
职教论坛(2017年13期)2017-06-13
科技创新导报(2016年21期)2016-12-17
中小企业管理与科技·下旬刊(2016年10期)2016-11-18
科技视界(2016年18期)2016-11-03
商业会计(2016年13期)2016-10-20
成才之路(2016年25期)2016-10-08
科技视界(2016年20期)2016-09-29
