基于最佳路径算法的虚拟导航在BIM技术中的应用
2022-05-21 08:15:52呼腊梅
铁路技术创新 2022年1期
呼腊梅
(1.北京经纬信息技术有限公司,北京 100081;2.中国铁道科学研究院集团有限公司 电子计算技术研究所,北京 100081)
0 引言
建筑发展是人类文明进步的重要组成部分,BIM技术的广泛应用给建筑设计、施工和运维阶段的管理带来了巨大变革[1]。在设计阶段,将BIM模型信息应用于能耗、结构、声学、日照、热工程等领域,为绿色建筑提供数据性分析[2-3];在施工阶段,依托BIM技术,能够对施工初期的工程量进行快速统计,在施工管理、节约成本、减少安全隐患、提高项目效率等方面起到重要作用[4-5];在运维阶段,BIM技术为房建设备运营状态提供数字化的技术支持,促进运维阶段的BIM模型与实际生产管理结合,提高运维管理效率与能力[6-7]。
GIS导航领域的最佳路径算法,为道路交通运输与线路比选提供了理论与技术支持[8],并被应用于多个领域[9-11]。在公路系统中采用最佳路径算法,优化了山区公路风险车辆路径问题,对保证人、车和物资安全具有重要指导意义[12]。在室内导航应用中,导航路径成为影响人移动的主要因素,与此同时,导航技术也在不断提升[13-14]。受房间、门、窗等室内构件的约束,房屋在空间布局、拓扑网络和空间约束等方面与传统的道路导航存在差异[15]。由于房屋空间位置的特殊性及复杂性,BIM技术的引入保证了房屋三维空间立体可视化。然而,基于BIM技术的虚拟导航研究相对较少。王游[16]从理论阐述的角度对基于BIM的室内导航进行了网络构建策略分析。
在铁路站房的日常导航路径中,由于车站结构布局不同、房间用途差异大,如何基于BIM技术实现站房内各房间的精确导航,并形成最佳导航路径,是各车站亟待解决的问题。依据BIM技术,采用最佳路径算法,将站房模型与路网图进行匹配性整合,为铁路车站的虚拟导航技术研究及应用提供技术方法。
1 最佳路径算法
由荷兰计算机科学家Dijkstra在1959年提出的Dijkstra算法,包括点、边和边(弧)的权三要素,是最佳路径算法中最常用的一种算法。基于该算法的路网图可形成赋有权值的有向图或无向图。Dijkstra算法适用于所有弧权值为非负的情况,其基本思想是从指定的点Vs出发,逐渐一层一层向外扩充去寻找最短路径。
Dijkstra算法思想:设G=(V,E)是一个带权有向图,把图中顶点集合V分成2组S和U,S中只有起始点s,U中是除s之外的顶点,并且U中顶点的路径是“起点s到该顶点的路径”。然后从U中找出路径最短的顶点k,并将其加入到S中;接着从U中移除顶点k,更新U中的顶点和顶点对应的路径,再从U中找出路径最短的顶点,并将其加入s中,按最短路径长度的递增次序依次把第2组的顶点加入S中,接着更新U中的顶点和顶点对应的路径。直到遍历完所有顶点。
2 数据模型搭建
2.1 BIM模型
BIM建模主要是利用二维CAD图纸作为底图,在Revit软件中搭房建模型。主要包括创建标高和轴网,利用族库信息搭建梁、板、柱墙等构件、添加构件信息,存储Revit文件。在Revit文件创建过程中,能实现数据与模型的互联互通。以京张高铁昌平站作为实验区域,在Revit软件中搭建BIM模型,并为各模型构件添加属性信息,BIM模型平面见图1。图1中选中构件为花岗岩地面,右侧列表中展示该构件的详细信息。
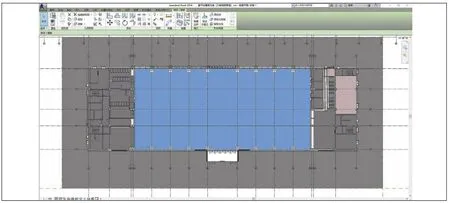
图1 BIM模型平面
2.2 路网模型
路网模型包括点模型和线模型,点模型作用是确定室内与室外的关键位置,形成关键站点,线模型作用是连接各站点模型,实现点点之间路径连通。搭建路网模型时,利用二维CAD图纸作为底图,在CAD中绘制点与线。针对穿墙和窗户的构件,线模型不与表示该类构件的线型相交;针对门构件,线模型穿过门,直到各房间内部。绘制点模型时,需要将点模型与线模型相连,实现各关键站点之间路径关联。昌平站一层路网见图2。

图2 昌平站一层路网
3 虚拟导航技术
基于BIM的虚拟导航技术是将三维BIM模型与路网图进行集成,采用Dijkstra算法,实现三维场景下的最佳路径选择。主要通过数据轻量化、坐标系转换、站点选择等技术实现虚拟导航。
3.1 数据轻量化
数据轻量化,分为BIM模型轻量化和CAD图纸轻量化。BIM模型轻量化,不仅可以实现数据与模型分离,同时能够降低模型的存储空间,实现不同数据格式的统一化管理。模型轻量化的基本原理是将BIM模型实体表面进行三角面片划分,除去冗余的几何形状、节约模型的存储空间,同时将BIM模型中携带的属性信息集中存储在数据库中进行统一管理。CAD图纸轻量化主要是将CAD中表达的点元素与线元素进行几何形状和数据信息分离。CAD图纸和BIM模型采用同一种轻量化工具,能实现不同格式数据、不同格式模型的标准化、统一化管理,便于路网图与BIM模型匹配。昌平站选用Supermap-idesktop软件进行Revit模型与CAD数据的轻量化处理。
3.2 坐标系转换
BIM模型经过轻量化后,可以在三维场景中查看各构件的信息。与BIM模型对应的路网图在二维CAD软件环境中创建,因此需要将路网图转换到三维坐标系中。在Supermap-idesktop中,需要将轻量化的路网图进行二、三维坐标系转换。其思路是首先设定路网坐标系,如二维平面中的84坐标系;其次选择该路网在三维场景中适合的坐标系,如三维地理环境下的84坐标系,通过三参数转换法(Geocentric Translation)进行二、三维坐标转换;再次将轻量化后的路网图二维点、线分别进行三维点、线转换,形成三维空间下的路网图;最后,通过配准的方式,分别在路网图与BIM模型中相同的位置刺点,并计算路网图和BIM模型的配准误差,在误差允许范围内时,即可进行配准,实现轻量化后的路网图与BIM模型在球面场景中的融合。
3.3 虚拟导航
基于Dijkstra算法,依次选择路径中的起始、经过、终止站点,并对各站点进行命名,依据路径最短的原则,自动识别出最佳路径。通过虚拟路径的预演功能,可在视图中动态查看基于BIM模型的虚拟导航指示标准确位置,实现导航路径在虚拟环境中的实用性。针对路径中存在障碍物的情况,可在视图中设置障碍点,在导航路径的模拟中能够自动避开障碍物,实现路径的最优选择,达到存在障碍物条件下的虚拟导航。
4 应用实例
以京张高铁昌平站为例,对基于BIM的虚拟导航技术应用展开研究。主要包括数据配准、模型整合和虚拟导航路径选择。
4.1 数据配准
基于关键点、线重合的原理,利用Revit软件中的楼板族库搭建路网图外轮廓模型,并将新搭建的外轮廓位置与既有的Revit模型位置进行匹配,采用4点配准法,将路网图与既有的轮廓模型配准(见图3)。图3中,左侧配准图层为轻量化后的路网图层,源点X、Y值为路网图中编号1、2、3、4的坐标点;右侧参考图层为与Revit模型相对位置匹配的轮廓模型,目标点X、Y的值为昌平站编号1、2、3、4的关键点实际坐标值。计算参考图层和配准图层的误差,所得误差在允许范围内时,可将路网图配准到新的坐标位置。
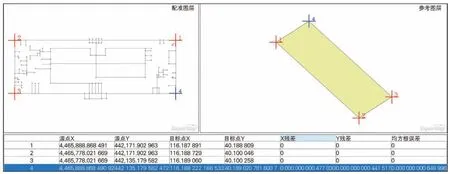
图3 路网图与BIM模型数据配准
4.2 模型整合
将配准后的模型经过图层叠加,形成具备路网元素的三维BIM模型,路网图与BIM模型融合效果见图4。图中白色线为路网图的线元素,蓝色点为路网图中的点元素。通过选择点元素,并给点元素命名,即可实现不同站点最佳路径的虚拟导航。
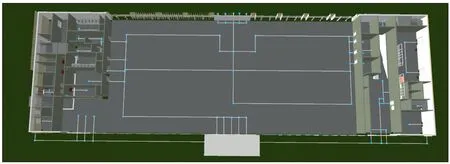
图4 路网图与BIM模型融合效果
4.3 虚拟导航
在三维BIM场景中,通过选择不同类型的虚拟导航指示标,可模拟虚拟环境中的导航路径(见图5)。图5中展示从门厅到1#卫生间的虚拟导航路径,三角形箭头方向为虚拟导航行驶方向。

图5 虚拟导航路径
4.4 路径选择
通过选择不同站点,即可实现三维BIM环境下的最佳虚拟导航路径展示,无障碍最佳虚拟导航路径见图6、存在障碍最佳虚拟导航路径见图7。图6展示从门厅到1#卫生间的无障碍最佳虚拟导航路径;图7展示当最佳虚拟导航路径中存在障碍时,可自动避开障碍点,形成新的最佳路径。
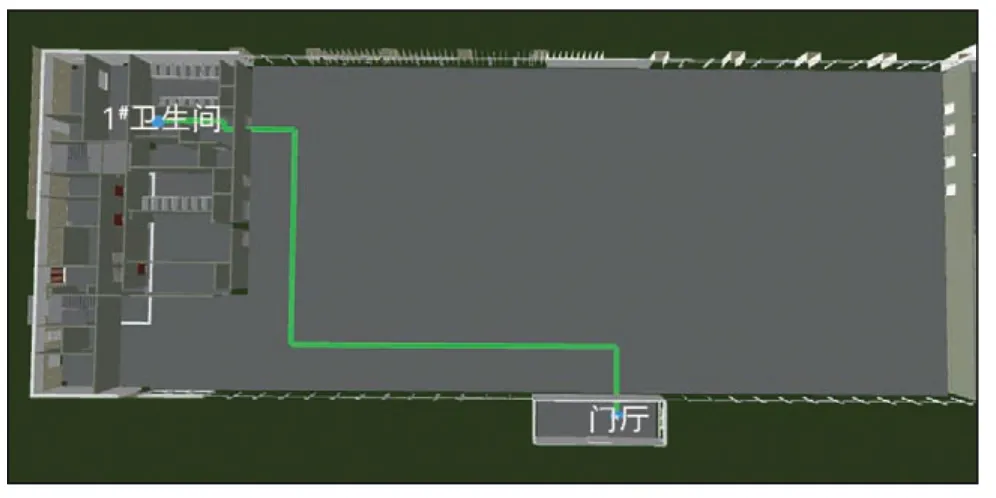
图6 无障碍最佳虚拟导航路径
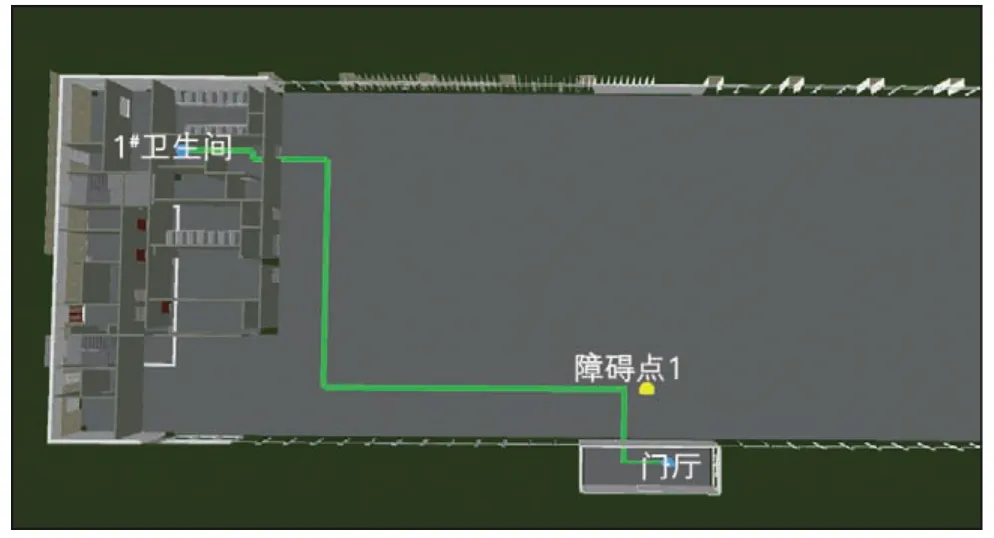
图7 存在障碍最佳虚拟导航路径
5 结束语
基于Dijkstra算法,利用BIM技术,在三维场景中展开虚拟导航应用。利用CAD和Revit软件分别搭建路网图和BIM模型,并在Super-idesktop中进行轻量化,对轻量化后路网图元素和BIM数据采用配准模式,实现路网图与BIM数据融合,最终实现不同情况下的最佳路径在BIM场景中的虚拟导航。
猜你喜欢
精密成形工程(2022年2期)2022-02-22 05:44:14
中等数学(2021年9期)2021-11-22 08:06:58
智富时代(2019年2期)2019-04-18 07:44:42
山东科学(2018年6期)2018-12-20 11:08:58
环球飞行(2018年7期)2018-06-27 07:25:54
中国公路(2017年11期)2017-07-31 17:56:30
中国公路(2017年7期)2017-07-24 13:56:29
中国公路(2017年10期)2017-07-21 14:02:37
专用汽车(2016年1期)2016-03-01 04:13:19
专用汽车(2015年4期)2015-03-01 04:09:07