一款仿鸟类扑翼无人机的飞行动力学仿真分析
2022-05-20 06:39:42邵冠豪
无人机 2022年2期
邵冠豪
中国直升机设计研究所
对于仿鸟类扑翼无人机的多体动力学模型,可基于XFLOW软件进行扑翼气动力计算和三维参数插值,并建立扑翼无人机飞行动力学仿真计算平台,以进行模拟仿真。通过飞行仿真算例计算,可研究无人机总质量、机翼质量占比、飞行频率等参数对于无人机飞行轨迹和姿态变化的影响,为完善无人机设计提供了理论参考。
扑翼无人机是重于空气的一类航空器,作为一种仿生学的典型工程应用,相较于传统飞行器而言,扑翼飞行器具有隐蔽性强、机动性强、飞行效率高等优点,在军用和民用领域都具有广阔的应用前景。近年来,国内外诸多研究机构都开展了扑翼机的相关研究,并取得了丰硕成果。然而,现今已研制成功的扑翼无人机仍不具备像自然界中的鸟类或昆虫一样卓越的飞行能力,扑翼无人机相关研究和设计方法至今仍不成熟。扑翼无人机设计的主要难点之一是无法确定设计参数对飞行特性的影响,因此,飞行动力学建模特性分析对于无人机设计具有至关重要的指导作用。
本文面向某型仿鸟类扑翼无人机的设计研发需求,进行扑翼无人机多体动力学建模和飞行气动载荷CFD计算,建立扑翼无人机的飞行动力学模型,并基于该模型开展纵向飞行动力学仿真和参数依赖性分析,为该型扑翼无人机的参数设计和优化提供理论指导。
扑翼无人机多体动力学建模
(1)坐标系与动力学模型
仿鸟类扑翼无人机实物样机如图1所示。该无人机由机身、左右机翼和尾翼四个主要部件构成,将上述部件看作均质刚体,不考虑其在气动载荷和惯性力作用下的变形,则可以将该无人机简化为由四个刚体组成的多体动力学系统。
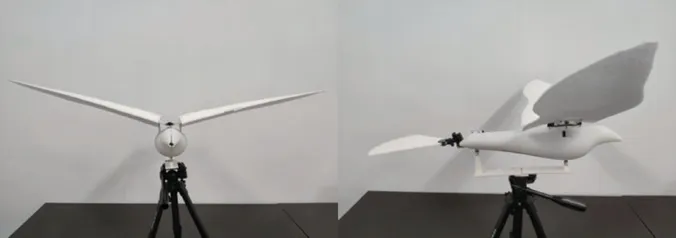
图1 仿鸟类扑翼无人机实物样机。
多刚体简化模型如图2所示。各部件质心记为C0、C1、C2、C3,系统质心记为CC。机翼尾翼和机身之间通过球铰链H1、H2、 H3连接,本文中考虑一种既扑动又扭转的机翼两自由度复合扑动,机翼扑动参数的表达式为:
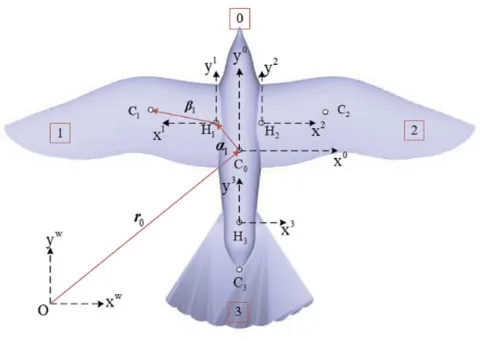
图2 仿鸟类扑翼无人机多刚体简化模型(俯视图)。
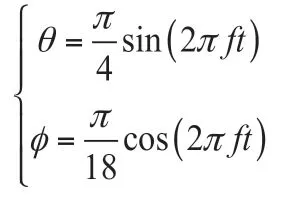
其中,θ为机翼扑动角,Φ为机翼扭转角,f为扑翼频率。
用于描述系统运动的直角坐标系定义如下:(a)地面坐标系: Oxwywzw,原点O位于空间一固定点, Ozw垂直于地平面向上,Oyw轴沿正北方向,Oxw符合右手定则;(b)随体坐标系:C0x0y0z0、H1x1y1z1、H2x2y2z2、H3x3y3z3分别表示原点在C0、H1、H2、 H3,随各部件运动的随体坐标系;(c)质心坐标系: Ccxwywzw表示原点在系统质心,且各坐标轴指向始终与地面坐标系指向相同的平移坐标系。
(2)动力学微分方程
由Newton/Euler法推导,无人机模型动力学微分方程组如下:

基于XFLOW的扑翼气动力计算
(1)计算方法及条件
本文采用XFLOW软件进行气动力计算,XFLOW是法国达索公司旗下基于格子玻尔兹曼方法(LBM)开发的新一代商用CFD软件。相较于传统CFD软件,该软件在处理扑翼运动这类含有运动边界的气动问题时计算效率较高。
(2)计算结果及分析
插值结果如图3~图5 所示:

图3 工况下气动数据插值。
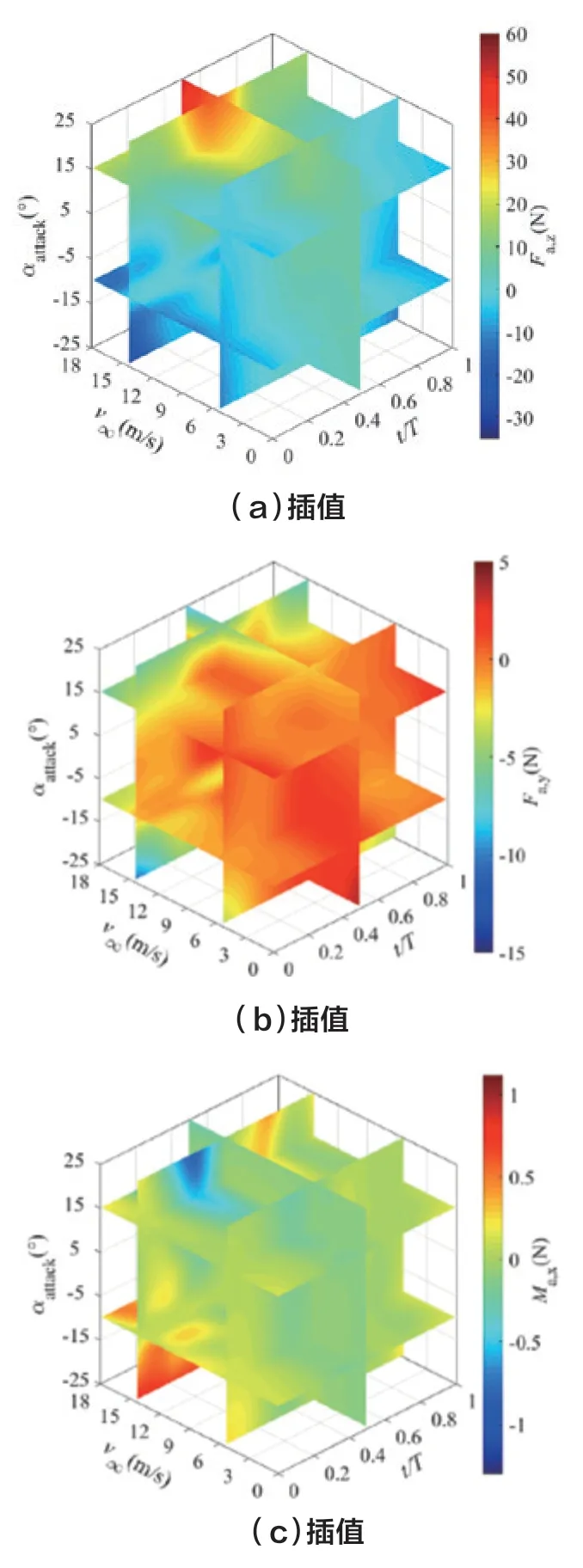
图4 工况下气动数据插值。
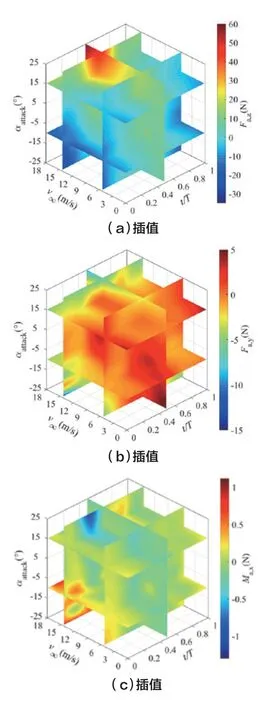
图5 工况下气动数据插值。
飞行仿真及参数影响分析
(1)总质量的影响
在第一组飞行仿真算例中,参照无人机实物样机将机翼质量占比λ设置为0.0115,其中λ=(m1+m2)mtotal;将扑翼频率设置为f=5Hz,将无人机初始俯仰角θ0,initial为10°;设置初始飞行速度v0,initial方m向平行于机身轴线,大小为10m/s。考虑无人机总质量mtotal分别为435g、335g、235g、135g时,无人机的飞行轨迹和飞行姿态变化。仿真结果如图6示:当无人机的总质量较大时,无人机前向速度迅速减小,垂向速度发生一定波动,无人机的迎角随着扑动过程进行快速增大,气动迎角达到极限。当总质量较小时,无人机迎角先一定程度增大,随后在气动力矩作用下不断减小,最终使得负迎角逐渐增大,无人机下俯,速度不断增大,最终超出气动模型来流速度范围。综合来看,四种质量设置下,当总质量为235g时,无人机飞行姿态变化更为平缓。
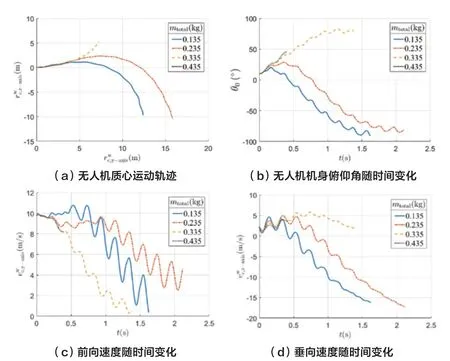
图6 总质量影响计算结果。
(2)机翼质量占比的影响
在第二组飞行仿真算例中,将飞行总质量设置为235g,扑翼频率设置为5Hz,无人机俯仰角为10°,初始飞行速度v0,initial,方向平行于机身轴线,大小为10m/s。考虑无人机机翼质量占比λ分别为0.015、0.115、0.215、0.315时,无人机的飞行轨迹以及飞行姿态变化情况。仿真结果如图7所示。
由图7,当机翼质量占比逐渐增加时,扑翼无人机的质心轨迹在无人机前向不断延伸,无人机飞行距离增加。此外,无人机的机身俯仰角随时间变化曲线趋于平缓,而当机翼质量占比较小时,在该参数设置下,无人机急速向下俯冲最后导致飞行速度达到范围,计算停止。在前向速度和垂向速度上,无人机的质量占比影响主要体现为:当无人机质量占比较小时无人机的前向速度会以较快的速度减小,而当质量占比逐渐增加时,无人机的前向速度保持一定的波动逐渐减小;无人机的垂向速度变化趋势相同,随着无人机俯仰角的负值不断增大而不断加速。由仿真结果表明,当无人机总质量不变,机翼质量占比为0.315时,更有利于无人机的无控飞行特性。
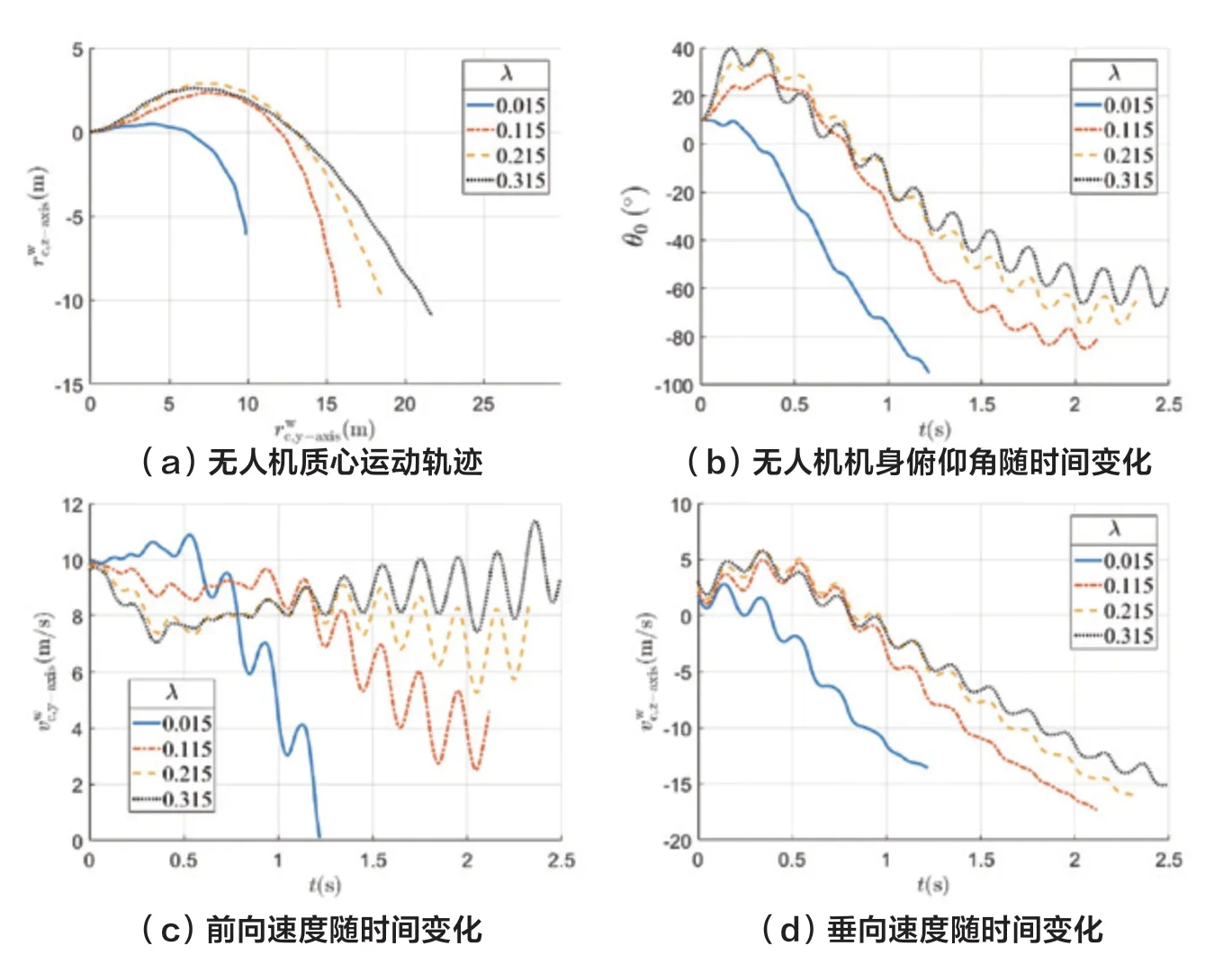
图7 机翼质量占比影响计算结果。
(3)扑翼频率的影响
本组算例主要研究扑翼频率f的影响,将飞行总质量设置为235g,机翼质量占比λ设置为0.315,机身俯仰角取 ,其他各项设置皆保持不变,扑翼频率选取范围为3Hz、4Hz、5Hz。共计算三种扑翼频率下无人机的飞行状态情况。计算结果如图8所示。
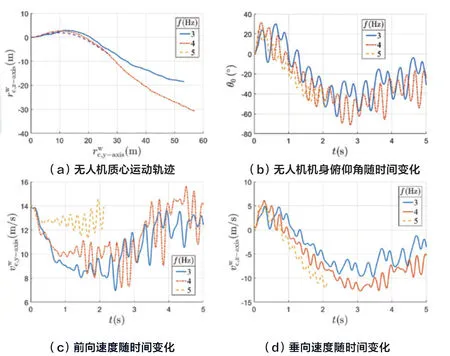
图8 扑翼频率影响计算结果。
图8中,我们可以得到以下结论:当扑翼频率为5Hz时,由于气动推力的增加,导致扑翼飞行速度较快达到飞行仿真限定最大速度,导致计算终止。当扑翼频率为4Hz时,在给定时间范围内,飞行仿真可以持续进行,得到结论表明,无人机在仿真初期小幅度高度爬升后开始逐渐下降。同时,其俯仰角变化是随着扑翼时间增加,其值逐渐由正值变为负值,当达到-10°左右时,呈逐渐回升趋势。前向速度和垂向速度都出现先减小后增大的趋势。当扑翼频率为3Hz时,给定5s时间范围内,飞行仿真同样可以持续,得到结果对比分析可以得出,3Hz下,无人机的飞行高度下降较小,且俯仰角变化幅值也相对较小。前向速度方面,3Hz与4Hz对比,一个周期内的前向速度平均值较小,但垂向平均值较大。基于仿真结果,无人机扑翼频率选取为3Hz。
结语
本文在仿鸟扑翼无人机实际设计需求的基础上,基于Newton/Euler法和XFLOW软件气动力计算和三维参数插值建立了该型扑翼无人机飞行动力学模型,并对仿鸟扑翼无人机样机的飞行动力学特性进行了仿真计算。计算结果表明,在本文的算例参数范围内,机翼总质量为235g、机翼质量占比为0.315、扑翼频率为3Hz条件下,扑翼无人机在无飞行控制条件下机身姿态更加稳定,无人机能够达到更远的飞行距离。 ■

猜你喜欢
天然气与石油(2022年4期)2022-09-21 07:05:54
北京航空航天大学学报(2021年6期)2021-07-20 07:23:52
北京航空航天大学学报(2020年10期)2020-11-14 09:26:06
西南石油大学学报(自然科学版)(2019年1期)2019-01-28 09:33:52
测控技术(2018年9期)2018-11-25 07:44:24
电测与仪表(2016年10期)2016-04-12 00:26:24
电测与仪表(2016年14期)2016-04-11 12:32:48
航空学报(2015年4期)2015-05-07 06:43:28
电测与仪表(2014年11期)2014-04-04 09:21:30
凿岩机械气动工具(2014年3期)2014-03-01 04:00:07