基于1→2相位协变克隆之逆的同时量子信息集中
2022-05-13 03:18张玉春柏明强柳人菊
四川师范大学学报(自然科学版) 2022年3期
张玉春, 柏明强, 吴 帆, 柳人菊
(四川师范大学 数学科学学院, 四川 成都 610066)
在量子信息理论中,Wootters等[1]已经证明一个未知的量子态不能被精确克隆,那么是否可以近似克隆呢?
1996年,Buzek等[2]首次提出了量子克隆的概念.量子克隆能够实现近似克隆,但其输入态和近似输出态是纠缠在一起的,这意味着测量其中的一个将影响另外一个.随后,Murao等[3-4]结合隐形传态,将量子克隆进行推广,提出了量子远程克隆.量子远程克隆可以将一个粒子的信息从发送者分发到许多遥远的接收者,实现远程量子信息的分布.
根据量子信息论,量子信息可以进行分发和重构,量子远程克隆就是信息分发过程,而远程信息集中就是信息的重构过程.2001年,Murao等[5]首次提出了远程量子信息集中,他们选择了一个4粒子非束缚纠缠态作为量子信道,然后执行局域操作,就完成了将分布于空间分离的3方的量子信息还原回来的任务.
从此,学者们对远程量子信息集中进行了广泛的研究[6-17].例如,Yu等利用GHZ态[6-7]、W态[8]和Cluster态[9]完成了优化1→2的通用远程克隆之逆;Hsu等[10-11]提出了将量子态推广到多粒子和高维系统的量子信息集中;Wang等[12-15]提出了基于相位协变克隆的远程信息集中;2014年,Peng等[16]提出了优化通用1→2的任意2粒子量子信息集中协议;2016年,Wang等[17-18]提出了添加控制方的量子信息集中方案.在现有的研究成果中,量子信息集中涉及的都是一个信道处理一个克隆态的情况.
为了提高信道资源的利用效率,试想:一个信道能否同时处理2个及以上克隆态的信息集中呢?基于以上考虑,选择2个1→2相位协变克隆态和一个7粒子信道,提出同时量子信息集中方案,并在方案中添加了控制者,其中控制者起到单向通信的控制作用,当且仅当在控制者许可下,信息集中方可完成.
1 量子远程信息集中
1.1 量子任务和量子信道假设有2个未知赤道态
的信息被分别加载到由粒子(A1,B1)和(A2,B2)构成的对称相位协变克隆态
|Ψ〉eiδ1|11〉)A1B1,
(1)
|Ψ〉eiδ2|11〉)A2B2,
(2)
其中,粒子A1(A2)和B1(B2)分别属于空间分离双方Alice1(Alice2)和Bob1(Bob2).
现在Alice1和Bob1想让David1来帮助他们将加载到态|Ψ〉A1B1中的信息集中回单粒子态
同时Alice2和Bob2让David2来帮助他们将加载到态|Ψ〉A2B2中的信息集中回单粒子态

并且要求这一任务必须在第三方Charlie的监控下完成,控制者Charlie不需要知道|Ψ〉A1B1和|Ψ〉A2B2的任何信息,但在整个量子任务中却起着至关重要的作用.
当然,这个任务可以通过2个受控量子信息集中协议来完成,每个协议需要耗费一个4粒子纠缠态作为量子信道及一个控制者,总共涉及8比特量子资源和2个独立的控制者.而本文提出这样一个协议,利用一个7粒子量子态作为信道和一个共有的控制者,就可以同时将|Ψ〉A1B1和|Ψ〉A2B2的信息集中回原始态.
为了实现这一量子任务,考虑7粒子量子态|H〉(4粒子Cluster态和一个含4项的3粒子纠缠态的张量积)作为量子信道,这个3粒子纠缠态的形式为
|E
i,j∈P={1,2,3,4},i≠j,
(3)
其中
|ω1〉=|000〉, |ω2〉=|001〉,
|ω3〉=|010〉, |ω4〉=|100〉,
根据GME-concurrence[19]度量可以来刻划n粒子纯态|Ψ〉的纠缠属性,定义纠缠度量GME-concurrence如下
CGME|Ψ〉:=
(4)
其中,r={ri}表示纠缠态|Ψ〉所有的二分类可能{Ai|Bi},i∈{1,2,…,n},ρAri代表关于Ari的密度矩阵.
对于(3)式中|Eij〉,可能的二分类
r={{1|23},{2|13},{3|12}},
计算
CGME|Eij〉:=min
这表明3粒子|Eij〉是最大纠缠态,具有良好的纠缠性质.
1.2 同时远程信息集中不失一般性,取信道
|H〉=|Cluster〉1C2D2⊗|E34〉=
这里粒子1、3、2、4、C、D1、D2分别属于Alice1、Bob1、Alice2、Bob2、Charlie、David1和David2,Charlie作为控制方,David1、David2作为量子信息|τ〉D1和|τ〉D2的恢复方.
于是整个系统为
|T〉=|Ψ〉A1B1⊗|H〉12CD234D1⊗|Ψ〉A2B2.(7)
利用Bell基
(8)
和
{|+〉,|-〉}
基
(9)
系统总态|T〉可以表示为
(10)
若记
li=(-1)i,i=1,2,…,16,
则(10)式中

|ρ
(11)
其中|ξi〉(i=1,2,…,16)代表Alice1、Bob1、Alice2和Bob2分别对各自的粒子对(A1,1)、(B1,3)、(A2,2)和(B2,4)执行Bell测量.Charlie对自己的粒子C执行{|+〉,|-〉}基测量后,系统总态最后所塌缩成的16种量子态.

|ξ〉eiδ2|1〉)D2⊗
(12)
从上式可以看出,|ξ〉D2D1是粒子D2和D1所处态的张量积形式.此时,David2对粒子D2执行酉操作σI,与此同时David1对粒子D1执行酉操作σx,二者就能同时恢复量子信息
整个过程涉及的酉算子表达式如下:
σI=|0〉〈0|+|1〉〈1|,
σx=|0〉〈1|+|1〉〈0|,
σz=|0〉〈0|-|1〉〈1|,
σy=-i|0〉〈1|+i|1〉〈0|.
其余测量情况下的信息恢复类似,塌缩态
|ξ〉i,i=1,2,…,16
与David2、David1所执行酉操作见表1.整个方案成功的概率为
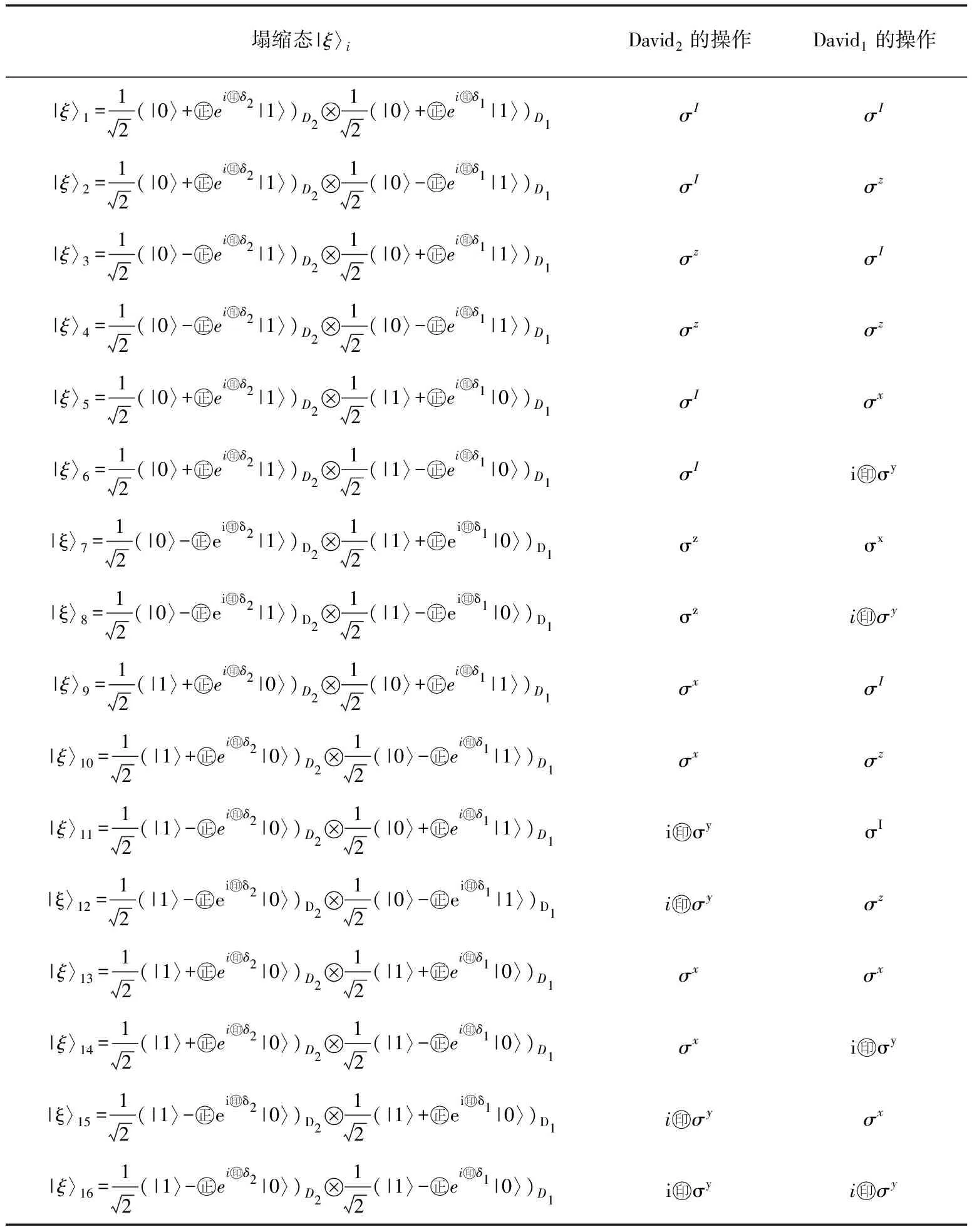
表 1 塌缩态|ξ〉i(i=1,2,…,16)与David2、David1所执行酉操作
1.3 概率性同时远程信息集中虽然最大纠缠态的良好纠缠性质能使得信息集中任务以最大概率取得成功,但是在真实的通信环境中,最大纠缠态不易制备,并且受环境影响容易转化为非最大纠缠态.因此,考虑非最大纠缠态为信道,将量子态|Ψ〉A1B1和|Ψ〉A2B2的信息同时集中回2个单粒子态|τ〉D1和|τ〉D2.
(3)式中|E13〉和信道|H〉取如下形式:
|H〉=|Clusterα〉

(13)
sin2α+cos2α=1,sin2β+cos2β=1,
其中
α,β∈[0,2π),
sinα,cosα,sinβ,cosβ≠{0,1}.
粒子1、3、2、4、C、D1和D2分别属于Alice1、Bob1、Alice2、Bob2、Charlie、David1和David2.于是整个系统利用Bell基和{|+〉,|-〉}基可以表示为
|T〉=|Ψ〉A1B1⊗|H〉1C2D234D1⊗|Ψ〉A2B2=
(14)
若记
i=1,2,…,16,
则
|λ
(15)
而塌缩态|φj〉D2D1(j=1,2,…,16)都可以通过一个酉操作(Uj)D2D1将其转化为以下
情况之一:




(16)
其转化过程为
(Uj)D2D1|φj〉
ji=1,2,3,4;j≡ji(mod4).
(17)
具体酉操作(Uj)D2D1见表2.
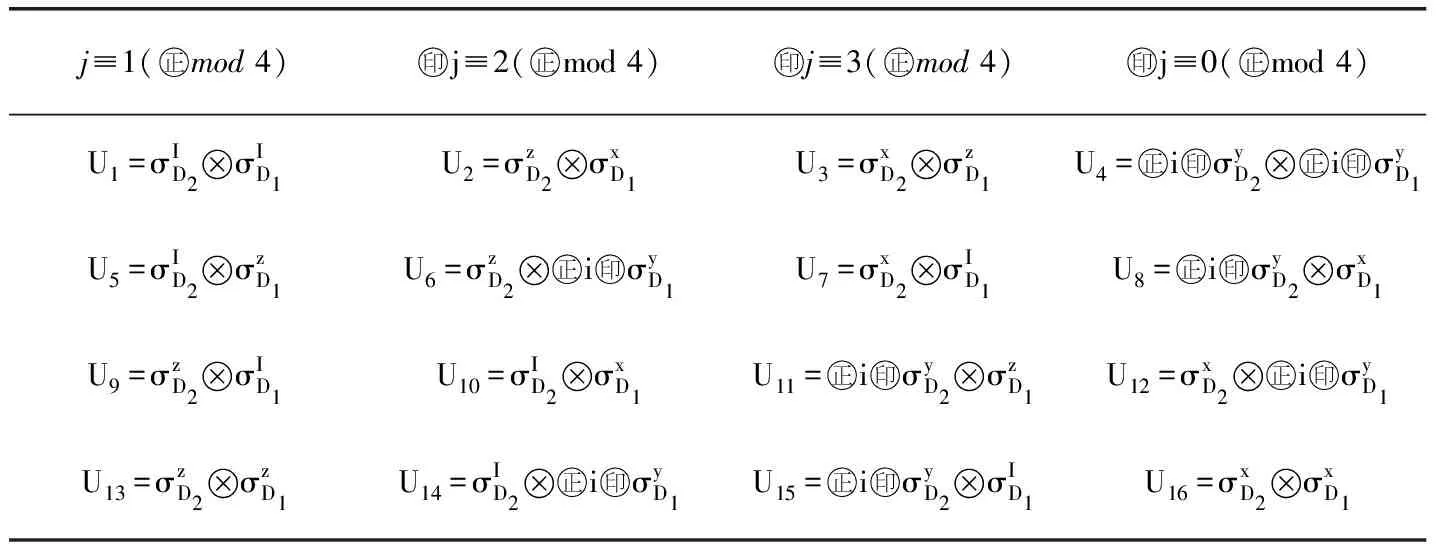
表 2 (17)式中酉操作(Uj)D2D1, j=1,2,…,16具体情况

|φ〉sinαsinβ|000〉+
(18)
(19)
的情况可按照类似方法进行操作.

(20)
由于系数未知,因此需要对系数进行讨论,分以下4种情形:
情形1sinα≥cosα,sinβ≥cosβ;
情形2sinα 情形3sinα≥cosα,sinβ 情形4sinα 信息恢复过程中,4种情形所做的操作类似,不失一般性,选择情形1来讨论.当 sinα≥cosα,sinβ≥cosβ 时,为了恢复原始信息,选择适当的酉变换如下 U 其中 W θ∈{α,β}. (22) (23) 情形2~4采用类似的方法即可恢复原始信息,与情形1不同之处在于所选择酉变换不同.为了完成情形2~4信息的恢复,再构造2个酉变换如下 U (24) 其中 P θ∈{α,β}. (25) 针对不同情形下酉变换的选择情况具体见表3. 表 3 情形1~4下引入辅助粒子后选择的酉变换与成功的概率 通过计算发现,同时恢复信息|τ〉1和|τ〉2成功的概率与参数α和β有关系,并且当 sin2α=cos2α=sin2β= 时,成功的概率最大为1. 本文提出了通过一个7粒子量子信道,同时将2个2粒子克隆态集中回原始态的信息集中方案.方案中添加了控制者,进一步增加了方案的安全性.在整个量子任务过程中,4个空间分离的参与者对自己所拥有的粒子做Bell测量,然后他们以经典通信的方式将测量结果告诉给控制者和2个恢复方.在控制者的许可下,2个恢复方根据所接收到的测量信息对自己所拥有的粒子做适当的酉操作或者引入辅助粒子进行投影测量,即可恢复原始态.当信道为最大纠缠态时,方案成功的概率为1;当信道为非最大纠缠态时,方案成功的概率与信道的参数相关.



2 结论
猜你喜欢
物理学报(2021年19期)2021-11-01延边大学学报(自然科学版)(2021年2期)2021-07-29数学物理学报(2020年4期)2020-09-07公民与法治(2020年12期)2020-07-25好家长(2020年3期)2020-06-05公民与法治(2020年4期)2020-05-30湖北大学学报(自然科学版)(2020年1期)2020-01-07克拉玛依学刊(2019年3期)2019-10-08财经界·下旬刊(2019年4期)2019-06-03陕西师范大学学报(哲学社会科学版)(2019年6期)2019-02-09