武汉地铁小洪山段隧道变形智能监测与分析
2022-05-13 04:43朱付广徐东升谭瑞山刘汉阳张志杰
土木工程与管理学报 2022年2期
朱付广, 徐东升, 谭瑞山, 彭 斌, 刘汉阳, 张志杰
(1. 湖北省电力勘察设计院有限公司, 湖北 武汉 430040; 2. 武汉理工大学 土木工程与建筑学院, 湖北 武汉 430070)
随着我国基础设施建设的发展,城市中地铁工程、城际间铁路公路的建设成为了重点发展的聚焦点,承接道路工程之间连接作用的隧道也随之瞩目[1]。隧道的安全问题中,沉降问题始终是受到高度重视而不可或缺的重要监测内容[2]。在过去的一段时间内,对隧道的变形监测主要是由人工操作的全站仪监测、激光测距甚至是钢尺测距[3,4]。由于现代基础建设的隧道距离长,断面大,部分工程在深入地下或者更加复杂多变的环境中,使用人工方法持续监测需要消耗大量人力物力,且易受到干扰产生误差。基于此现状,需要一种更加方便、易于操作且可持续监测的方法进行隧道收敛活动监测的自动化变形监测方法,基于软件平台开发的可连续进行的实时变形监测系统是现在隧道监测的研究重点[5,6]。
近年来,针对隧道收敛活动监测的自动化方法已经得到了不少的研究。沈圣等[7]将分布式光纤应变传感应用于盾构隧道的横截面收敛变形监测中,提供了一种新型的隧道监测方法;侯公羽等[8]通过分布式光纤应变传感技术结合隧道沉降曲线模型对隧道沉降进行了反演推算并组织了现场试验,肯定了智能传感在隧道工程中的应用;曾铁梅等[9,10]将光纤传感测量应用到了隧道火灾和渗漏以及钻孔灌注桩检测中,扩宽了隧道监测的方法和思路;刘绍堂等[11]通过结合以往的激光测量方法,对激光扫描法隧道变形监测的误差进行了分析,肯定了激光传感扫描方法的精确性。谢雄耀等[12]将三维激光扫描技术应用于全断面变形监测,并结合数值模拟分析处理监测数据。可以看出寻找一种智能传感的方法对隧道进行自动化监测是研究者们正在探寻的目标。王隆等[13,14]结合数字摄影测量对隧道的变形进行了全面的研究,并将这个地下空间结构变形通过数字化模型表征了出来;丁勇等[15~17]将光纤传感技术融入结构健康监测中形成了一个系统,实现了从测量到分析一体的系统化方法。
本研究通过提出一套实用性更强的隧道变形监测方法并将该方法运用于实际工程中,监测了湖北省武汉市地铁8号线二期三标洪山路站至小洪山站隧道工程中某一段盾构隧道侧壁的变形。该工程实时变形数据验证了该系统的可行性,并针对该系统监测的数据对该段工程进行了分析。对于该变形监测方法而言,该系统可由终端控制监测频率并获取监测设备测量到的实时变形数据,通过实时数据整体分析隧道内部各部分的变形情况并建立模型,该模型可识别变形情况及其关联的危险等级,并将分析结果实时交互到预警系统中,从而对实际工程中的安全问题进行实时反馈。本研究对隧道的开挖过程、隧道后续的收敛监测以及预警有明确的指导作用,更加强调实时预警与人机交互,对土木工程智能化管理有着积极的指导意义。
1 隧道变形智能监测预警系统
1.1 系统框架
本次工程现场试验采用的实时变形监测系统由自主开发的数据采集与传输系统、数据处理与控制系统、智能预警系统以及检查与维护系统四部分组成,由自制传感器测量工程中的变形,经过数据处理系统中的信号处理和人机信号交互翻译,将监测得到的数据进行分类,并根据分类的结果对现场情况进行指示,其工作流程如图1所示。

图1 隧道变形智能监测预警系统工作流程
自主开发的数据采集系统由红外激光传感器和拉线收敛测距仪组成,作为智能监测预警系统的监测部分,其组成可以通过工程具体情况进行自定义;采集所得的数据通过传输系统进行信号放大、杂波过滤与信号转换,并将初步测量的数据传输到数据处理与控制系统进行进一步精细化处理。数据处理与控制系统为自主研发,该系统置于智能预警指示灯当中,可以将实时监测结果进行及时的自动化处理,及时识别测量中出现的明显误差并返回传感器中进行重新测量。该过程并不需要人工进行误差筛选,测量全过程均由仪器完成并处理数据,体现了监测的智能化。而智能预警系统则可进一步将测量结果实时反馈,即当经过处理后的数据中监测出相关测点在短时间内出现了极大的变形,则通过该预警指示灯可以向工作人员实时提醒,根据亮灯规则可反映出现场变形的大体情况,从而实现早期智能预警的功能。该智能预警系统安装在实际工程中后,并不需要人为处理数据与分析危险情况,所有的数据都会在该系统中进行处理并实现实时而快捷的人机交互,交互的现场情况简洁且有效。
1.2 系统组成
本智能监测预警系统中数据采集与传输系统由自制的红外激光测距仪与拉线收敛仪组成(图2)。该测距仪由红外激光传感器、单片机、降压模块、通信模块与电源组成;拉线收敛仪则由拉线传感器与其他模块组成。红外激光测距仪具有1 mm的精度且量程为100 m,拉线收敛仪具有1 mm的精度且量程为1.2 m。单片机模块控制了传感器模块的工作,包括定时测量,采集数据,数据初步分析与传输,控制传感器测距模式与休眠模式等工作。降压模块可将仪器内部内置的两颗拆卸式循环电源电量降压至单片机工作电压,通信模块可建立该传感器与智能预警系统内储存器之间的无线连接。

图2 红外线激光测距仪与拉线收敛仪

图3 智能控制预警指示灯
智能控制预警指示灯如图3所示,该预警灯由单片机、指示灯、电源、降压、通讯、存储模块组成,是智能预警系统的核心部分。该预警灯内部内置的控制模块可远程控制隧道现场中安装的数据采集传输系统工作状态,在控制数据采集系统为测距状态时,通过通信模块收集传感器返回的现场数据,并根据现场实际情况亮起指示灯进行预警,指示灯从左到右依次为红灯(危险)、黄灯(较危险)与绿灯(正常),具体工作情况如下:该系统工作时不间断接入电源,智能预警指示灯内部的控制模块传输工作信号到传感器中,传感器保留工作的传输模块获取指令,激活测距仪的测距模块,按照指定工作频率采集数据并传输到智能控制预警灯中,该数据将在预警灯内部的控制模块中进行数据处理,确定现场变形量是否达到预警的阈值。当现场变形量十分大的时候会根据划分的危险等级亮灯并返回数据重新测量,危险等级越高,测量的频率就越高;如若返回的数据正常,则预警灯将发出指令控制传感器进入休眠模式,等待下一次的测量。
对于该智能预警系统而言,通过程序调用传感器测量的数据将完全自动储存于智能控制预警指示灯中的存储器中,包括自动设定记录的监测数据与当位移超过预警阈值时多次测量的监测数据。这些数据包括时间在内都是真实而有效的,预警指示灯对施工人员的提醒也体现了该系统的实时性。
1.3 参数标定与误差控制
对于该智能预警系统而言,传感器测量的精度是预警的基础。如图4所示,为了测定该拉线传感器的精度,将拉线收敛仪收敛位置拉出500 mm后,在0~60 mm范围内拉动收敛仪,将拉线一段发生的位移记录下来并同时将拉线收敛仪测得的数据进行对应记录,以此形成标定与对应。三个不同收敛仪的位移误差分布如图4所示,收敛仪的误差分布基本满足高斯分布,误差基本在1 mm左右波动,大的误差在应用中会多次测量缩小误差且本身出现频率很小,测量精度满足工程要求。

图4 拉线收敛仪误差分布直方图
图5展示了红外激光测距仪的误差分布曲线,在0~50 m范围内移动激光测距仪的标靶,将实际距离与测距仪测量的距离进行比对。从1号到11号测距仪的误差平均值分别为:-0.072,0.273,-0.035,0.129,0.225,-0.260 mm,其标准差分别是0.726,0.767,0.746,0.793,0.879,1.193。1,3,5号传感器测量误差受制于试验限制误差可能偏大或者偏小,但整体分布在-2~2 mm之间;7~11号传感器的结果具有良好的对称性,误差分布在-3~3 mm之间。这说明传感器的误差均能满足工程实际需要,数据返回及时且稳定。红外激光测距仪与拉线收敛仪的误差均经过了实验室的标定试验,在实际工程应用中该红外激光测距仪并不会以接近量程的距离进行使用,同时多次、连续的测量与后续连接智能预警灯之后调用控制系统可实现单个数据多次测量,进一步降低误差,体现了该系统的准确性。

图5 红外激光测距仪误差分布概率密度曲线
1.4 系统优势
相较于其他既有的隧道自动化监测系统,本文开发的智能预警系统具有鲜明的优势。传统监测系统或方法普遍具有一定的缺陷,例如自动化摄影测量方法对环境要求较高,过于明亮或者昏暗的环境都会影响成像质量和测量精度;三维激光扫描仪则鲜有在很长时间跨度中进行持续工作的能力;光纤光栅测量的精度与抗干扰都相对较好,但其测量的光纤信号需要进行处理后才可获得采集出来的数据变化情况,实时性较差;其他的如自动化激光测距、静力水准监测、测量机器人等分别具有高成本、较小的应用范围和低干扰抗力等不利因素。
本文所开发的隧道变形智能监测预警系统基于上述基本框架,经过实验室论证了其准确性与可靠性。针对施工现场复杂的变化情况,通过数据处理与控制系统消除可能受到的环境干扰与误差,并通过智能预警灯建立人机交互,实时将监测数据转化为可视的安全信号,方便现场人员及时作出判断。该系统有以下优势:
(1)结合其内部激光传感器与拉线收敛仪等可变化的数据采集部分,具有根据现有条件灵活调整,减小环境影响的优势;
(2)可将数据采集部分放置于隧道壁面之上(参照本文的后续章节),该系统的放置对现场施工与后续通行基本无影响,在隧道施工及投入使用后具有可长时间持续监测的优势;
(3)系统在长时间监测时实时将数据转化为可视的安全信号,具有实时性的优势;
(4)其内置的数据处理系统可自动校准数据并实时反映于预警灯上,体现了其智能化的优势。
2 隧道现场监测
2.1 工程概况
现场实测试验基于武汉地铁8号线二期三标洪山路站至小洪山站已开挖隧道。该段全长为1595 m,从洪山站到小洪山站采用了大断面、小断面矿山法隧道与盾构隧道三种掘进方式施工。大断面矿山法隧道穿过微风化灰岩,岩溶裂隙全部提前扫描并灌浆处理;隧道通过爆破法施工,最大具有宽20.14 m、高12.83 m的内轮廓,埋深为23 m,该断面是武汉市地铁隧道工程中最大的断面。盾构法施工的隧道穿过了微风化灰岩、含黏性土粉砂、黏土与粉质黏土部分,具有极其复杂的地质情况,灰岩段施工最为困难,全断面硬岩段的盾构掘进经过了精细化的推演。本试验布置于盾构隧道中,周围地质为微风化灰岩,进行时该隧道段刚刚完成衬砌支护,在隧道侧壁安装我们的传感器并根据现场情况布置该智能预警系统分布。
2.2 现场布置与测量方案
基于红外激光测距传感器的监测方法与基于拉线收敛传感器的监测方法在本工程中得到了应用,为了获取连续的变形数据,在隧道的某一个区段内安装多台红外激光测距仪,红外激光测距所需要的标靶安装于垂直于测距仪的上端,同时为了数据之间的相互验证,所使用的拉线收敛仪一端固定在了标靶同一位置。传感器的安装位置具有初始的安装参数,同时各仪器之间具有初始测距的读数,确定读数正确之后将各点相对位置记录下来,通过各个传感器之间的相对位移情况,可以得到标靶处的相对变形距离,同时标靶本身面积较大,沉降发生的小位移并不会影响标靶的对应情况,故该相对变形距离可以得到隧道的实时纵向、横向变形,同时通过智能预警灯中接受到的数据对隧道安全性进行实时评估。图6是现场安装情况布置图。

图6 小洪山站隧道施工现场布置

图7 隧道变形监测系统硬件分布
在现场安装过程中我们对于3个标靶之间的距离本应当是相同的,但是由于隧道现场的限制以及传感器本身所具有的高精度,测量得到的标靶之间的距离本身具有一定差别,传感器之间的距离以及传感器与标靶之间的距离都不相同,以方便控制传感器的仰角相同,方便计算。纵向的变形距离可以根据相对位移与设置好的仰角进行计算。其在横断面布置如图7b所示,考虑到该隧道上部基本不会受到偏心荷载,认定隧道的变形为对称变形。标靶与传感器布置于同一垂直线上。依据刘绍堂[11]的研究,考虑到来自仪器与标靶的误差在相关测量中占据了主要地位,传感器与标靶需要牢固固定在该隧道墙壁上。相关的环境影响,例如空气中由于施工造成的尘埃对激光传感器的影响则可以通过该智能预警系统本身的误差处理程序进行消除,故只需要将传感器与标靶牢固固定。在这里通过定制的L型铝合金板放置传感器,并通过环氧树脂粘合剂将传感器与合金板进行粘接以达到牢固粘结的目的。传感器与标靶在现场的布置情况如图7a所示,可得相关的参数:
H=dsinα
(1)
L=dcosα
(2)
式中:d为红外激光测距仪所测得的距离;α为安装仪器仰角;H为标靶到传感器平面的距离;L为传感器之间的距离。拉线收敛仪可以获得隧道侧壁在横断面上的相对变形情况,激光传感器可以获得隧道侧壁纵向的相对变形情况。
2.3 监测结果与数据分析
智能控制预警指示灯中内置的存储器可以存储测量开始到结束所有传感器的测量数据,根据测量仪器的初始读数,我们可以得到后续测量数据的相对变化。为了验证该系统的稳定,我们将测量仪器放置于工地中并连续监测了一段时间。监测过程中收敛仪监测数据与激光测距仪数据如表1所示。

表1 各测点处测量仪器读数

图8 现场测量隧道变形示意
根据表1的测点最终测量仪器读数我们可以绘制出对应隧道测点的相对位置变化图,该测量仪器进入现场布置时隧道内部刚刚完成支护,在短期内隧道有较快的变形。传感器和标靶在隧道内部进行了牢固的固定,传感器上的位移变化为相对位置变化,以传感器位置为竖向基准,认定相对位置变化为该隧道标靶处的位移变形,现场测量隧道变形如图8所示。根据该图可以看出监测段整体均发生了变化,以传感器布置位置为竖向基准则可认为标靶处发生了沉降,2号标靶位置的沉降最大,且该标靶在测量中明显向1号标靶的位置横向偏移。1号和3号标靶均有向内部偏移的倾向,考虑到两侧的沉降情况,该收缩可认为是正常情况,2号标靶的偏移明显是受到了隧道内部环境因素影响,尽管隧道受到监测的断面均有沉降,但是整体纵向呈现拉伸的状态,为了印证2号标靶监测断面变化情况,我们需要隧道变形实时监测的情况。
隧道内部变形的实时监测情况可由监测的实时数据得出,这些实时数据全部储存于该智能预警系统的存储器当中,实时数据如图9所示。图9a是拉线收敛仪实时测量情况,可以看出在现场数据开始采集的15个监测时间步(以下简称时步)时2,4,6号测距仪均发生了较大的位移变化,该变化在之后一直持续到75时步均在一个稳定的值上下波动,4号测距仪则在75时步之后又一次发生了较大的位移变化,最终的变形量达到了-5 mm。

图9 隧道智能监测变形情况
图9b为激光传感器实时监测数据变化情况,在安装时,3,5号与7,9号激光测距仪安装位置相近,而3号与5号测距仪的数据波动相近,由于施工现场机械与人员的动作,导致了现场整体环境与固定在隧道侧壁上的传感器的波动,但是数据在受到扰动后仍然可以在准确的测量数据附近波动并可对强烈的扰动自动恢复,如7号测距仪所示。7号与9号布置位置相近但波动并不一致,7号测距仪在监测开始10个时步后受到了强烈的扰动,在这一段时步内其相对变形在0~8 mm内波动,但后续数据恢复稳定并最终保持在-3 mm。3号与5号测距仪变形方向相反,7号与9号测距仪亦然,隧道纵向整体处于拉伸,且2号至3号标靶间的波动相对于1号至2号标靶区域更大。
图10为传感器测量纵向变形与竖向沉降,竖向沉降依据于拉线传感器数据的变化,纵向变形则通过激光传感器测得的数据计算得到,以1号测距仪位置向9号测距仪位置方向为正。3号与5号传感器对应于2号标靶附近段L2与L3,这一段发生了非常明显的纵向收缩,1号测距仪与7,9号测距仪对应的区段发生了明显的纵向拉伸,居中的位置竖向沉降量最大同时其纵向变形量也是最大的,这说明在监测的这段时间内2号标靶附近发生了较大的变形,虽然没有达到预警的标准,但应当引起足够的重视。

图10 传感器测量纵向变形与沉降
在施工现场我们在完成该段时间的监测后复查了测距仪与智能预警灯的情况,如图11所示。以上采集的所有数据均储存在智能预警灯中,读取数据仅需要通过布置于施工现场外侧的预警灯即可获得所有测距仪的历史工作情况。复查发现,现场安装的L型铝板固定情况完好,测距仪与铝板固定完好,测量过程对施工未产生任何影响。现场监测到的变形并没有达到预警灯的预警临界值,预警指示灯在现场显示为“安全”灯常亮。

图11 隧道现场预警系统工作情况
3 数值模拟分析
隧道监测所得的现场数据可以通过数值模拟的方式进行分析,通过现场的变形情况可以大致了解隧道周围岩土体的变形情况。FLAC3D作为一种岩土体数值分析计算的有限差分软件,基于快速拉格朗日法的离散模型的有限差分使其并不需要经历大型刚度矩阵[18],同时其节点间具有位移连续性条件,故在隧道、边坡、基坑等多种工程中得到了广泛的应用[19]。本文采用FLAC3D模型模拟已支护的武汉地铁8号线隧道工程,通过建立岩土体结构单元,同时建立衬砌支护模型获取已支护条件下的稳定模型,通过已知监测到的隧道变形来校准模型的变形并分析该隧道周围岩土体受力与位移情况。
3.1 模型方法与参数选取
试验监测隧道所穿过的区域处于微风化灰岩区域,埋深29.75 m,上覆土层,隧道内已进行初衬,采用混凝土与加筋格栅并满布脚手架支护。隧道断面宽9.81 m,净高12.509 m。在模型中通过建立密集的网格,可监测衬砌对应位置沉降的变化值来模拟对应的沉降与变形[20~24]。建模是通过建立结构单元模拟土体与岩体,并建立壳单元模拟隧道内衬砌,考虑到需要监测隧道内沉降点,隧道的网格划分需要十分密集。基于以上建立的模型以及网格划分如图12所示。
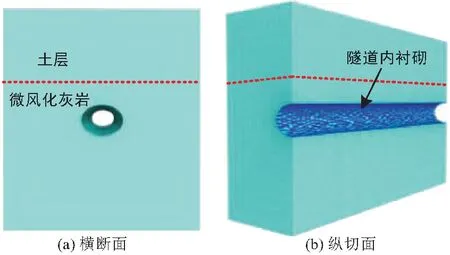
图12 隧道沉降模型与网格划分示意
由监测的隧道沉降可得,在2号标靶位置相对沉降量为5 mm,将2号标靶位置作为所建立模型y方向的中心,采用摩尔库伦模型模拟土层与灰岩层,由于隧道内衬砌由包括混凝土喷层与钢拱架支护多种措施组成,在模型中可以采用各向同性材料模型等效[25,26],其具体的参数见表2所示。

表2 隧道模型主要参数
FLAC3D计算模型中,隧道在相对应于监测现场的位置设置了监测点,其与现场监测对应位置的纵向变形与沉降量的对比如图13所示。

图13 监测点沉降、纵向变形与现场监测对比
3.2 模拟结果分析
图13中FLAC3D模拟出的隧道沉降与变形相对于现场实测数据而言有一定的差距,为了更清晰地看出变形的变化,我们采用以2号标靶为基准,1~3号传感器之间的距离作为-2,-1位置区间;4,6,7号传感器之间的距离作为1,2位置区间。现场测量中纵向变形较大,参照图8所示整个测量过程标靶处于不均匀变形的情况,模拟中很难复现现场施工的不均匀变形,但数值较为吻合。由图14隧道的应力云图可以看出,在隧道上侧土层和岩层分界的地方应力发生了较大的变化,由衬砌单元的位移变化可知,隧道变形在衬砌中造成的影响最主要集中于隧道的顶端,上覆土体与岩体的自重使应力向衬砌单元传递,同时撑起的支护作用使隧道本身并不直接受到荷载,而是将力传递至隧道周围,同时隧道下部的岩体为隧道提供支撑,故隧道衬砌支撑位置周围的应力主要由衬砌承担。

图14 隧道沉降模型应力云图
图15为隧道总位移及塑性区云图。如图15所示,隧道开挖区域上部有较大的沉降,结合应力云图可知衬砌起到了明显的支护作用,模拟中认为的理想情况中隧道下半部分基本无位移,对应于隧道现场监测中安装于隧道下半边的测距仪作为基准。由图15b可知,上部土体的塑性区域为剪切破坏与拉伸破坏,下部的绿色区域为剪切破坏,在土体与岩体交界处有向两侧延伸,并环绕整个隧道周边一圈,隧道上部进入塑性区域主要是由于剪切,隧道下侧进入塑性区域除了剪切外还有拉伸破坏。这都说明了隧道模型的变化主要是由于上部土体、岩体与两侧岩体挤压所致。而隧道现场监测的数据中变化并不均匀也不对称,这主要是由于隧道施工时对现场的影响。

图15 隧道沉降模型总位移及塑性区云图
4 结 论
本文对现有的各种隧道沉降变形监测方法进行了研究,研发出了一套实时监测的隧道变形智能监测系统,该系统基于激光测距方法与拉线收敛方法,结合无线传输与智能分析,可实时监测隧道变形并及时发出预警,实用性更强,是土木工程智能化的一种可靠方法。依托于自主研发的隧道智能监测系统,我们在武汉地铁8号线小洪山站隧道刚开挖不久的初期进行了实时监测,该监测可对隧道的运营以及后期维护支护提出有建设意义的建议,具有工程应用价值。基于现场数据建立了FLAC3D有限差分模型模拟了沉降的情况,分析了隧道周围岩体与隧道本身应力分布与塑性区的发展。本研究主要结论如下:
(1)该隧道智能监测系统所监测的变形具有准确性、真实性与实时性,该系统对测点实时采集并无线传输监测结果至预警系统,通过及时的处理分析提前预警潜在的危险变形。智能预警系统可建立监测系统与现场人员的实时沟通,是土木工程智能化中有意义的一种方法。
(2)监测结果显示整个隧道监测段在开挖初期有较大的沉降,且2号标靶测点的变形最大。现场监测受到施工及其他环境影响,有波动但是可以测得稳定的数据,如7号测距仪在初期受到了较大的影响,但在随后的监测过程中逐步恢复稳定并测得了数据。
(3)有限差分法模拟结果显示:土层与岩层的分层对于水平向应力传递与整个土体岩体的塑性区发展有较大影响。隧道变形主要来源于上部土体岩体的压力,周围岩体的挤压对隧道变形也有一定的影响,隧道衬砌有效地支撑了岩体变形。依据现场数据可得,隧道拱顶沉降较大,需要及时进行二次支护。
猜你喜欢
包装工程(2022年1期)2022-01-26
云南画报(2021年9期)2021-12-02
意林原创版(2021年7期)2021-08-03
智慧少年·故事叮当(2020年10期)2020-11-06
中华诗词(2020年1期)2020-09-21
作文周刊·小学二年级版(2018年29期)2018-11-26
智富时代(2018年5期)2018-07-18
智富时代(2018年5期)2018-07-18
数学大王·中高年级(2016年12期)2016-12-26
小天使·四年级语数英综合(2016年11期)2016-11-29