
基于FPGA的电机控制器设计与性能验证
2022-05-12 09:42:46高春伦高文进王市伟刘红蕾
机电工程技术 2022年4期
高春伦,高文进,张 冀,王市伟,刘红蕾
(潍柴动力股份有限公司,山东潍坊 261061)
0 引言
中国承诺将于2030年前达到二氧化碳排放峰值,2060年前实现碳中和。碳达峰、碳中和的实现需要各行各业的深度参与,汽车碳排放是我国碳排放主要来源之一,新能源汽车行业的蓬勃发展无疑将助推这一目标的实现。新能源车的主要核心部件为电力供应系统、电机、电机控制器[1],电机控制器是衔接电力供应系统与电机之间关键部件,高性能的电机控制器将显著提升新能源车的整体性能[2]。传统电机控制器采用DSP作为控制核心,随着对电机控制要求的提高,控制算法越加复杂,尤其是功能安全的需求,使得采用DSP电机控制出现CPU负载率过高的情况[3],在高转速时出现响应滞后,性能降低的现象。为应对这种情况,特斯拉、宝马、大众等车企逐渐将现场可编程门阵列(Field Programmable Gate Array,FPGA)引进到控制器中,以提升控制器性能[4]。
国内外对基于FPGA的电机控制器做了大量研究。刘川等[5]设计搭建了DSP+FPGA的核心的控制单元,并仿真验证了其正确性与实用性,但未做台架实验;浙江大学邱建琪团队对电机控制有广泛而深入的研究,黄晓冬等[6]基于FPGA实现了电机控制的速度闭环系统,初步验证了FPGA用于电机控制器的可行性;Hoang Than等[7]实现了一种用于无传感器PMSM驱动的RBF-NN整定PI控制器;Mohammad等[8]设计了一种基于FPGA的时钟频率为30 MHz的电流PI控制器,经验证结果表明,执行时间为68 ns。
本文主要研究了永磁同步电机(Permanent mag⁃net synchronous motor,PMSM)空间电压矢量脉宽调制(Space vector pulse width modulation,SVPWM)技术,基于FPGA设计实现了SVPWM核心算法,最后利用实验台架验证了基于FPGA的电机控制器具有响应速度快、系统效率高等优势。
1 PMSM空间电压矢量控制原理
永磁同步电机因其动态响应好、低速下转矩大、定位精度高等优势,在新能源车上得到广泛应用[9]。空间矢量控制能够有效减小逆变器电压谐波损耗,且易于控制,是PMSM控制的最重要手段[10]。
分析建立PMSM的数学模型是实现空间电压矢量控制的基础,忽略电机磁滞损耗、涡流效应、磁场饱和效应、磁场的高次谐波,假设绕组电流均为正弦波[11],则PMSM可通过Clark变换将定子abc坐标系转化为dq正交坐标系,进一步通过Park变换转换为dq轴旋转坐标系下的数学模型,其矢量图如图1所示。d轴与永磁体励磁磁通方向重合,q轴与d轴正交,其关系如图所示,且坐标系与转子同步旋转,实现了dq轴绕组的解耦,将各系数时变系统变为恒量系统,PMSM数学模型下的电压方程为:
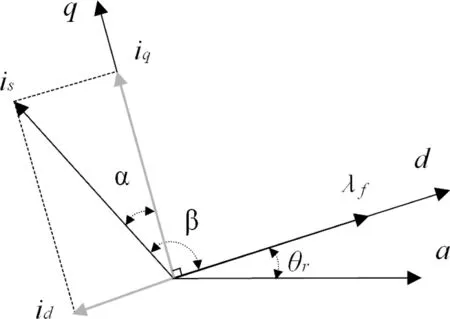
图1 PMSM旋转坐标系下的数学模型Fig.1 Mathematical model in PMSMrotatingcoordinatesystem
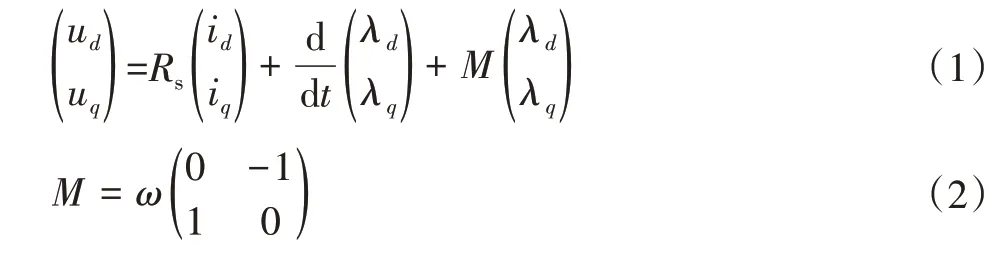
式中:ud、uq分别为定子电压在d轴、q轴上的投影分量;id、iq分别为定子电流在d轴、q轴上的投影分量;λd、λq分别为定子磁链在d轴、q轴上的投影分量;Rs为定子电阻;ω为电机转子电角速度。
磁链方程为:

式中:Ld、Lq分别为d轴、q轴上定子电感,即直轴电感、交轴电感;λf为永磁体磁链。
电机机械功率为:

则PMSM输出转矩为:

式中:p为电机极对数。
基于PMSM旋转坐标系下的数学模型,可建立PMSM空间矢量控制原理图,如图2所示。其基本原理是利用旋转坐标系下对d轴、q轴电流的控制实现对PMSM磁场与转矩的控制,d轴电流控制磁场,q轴电流控制转矩[12]。
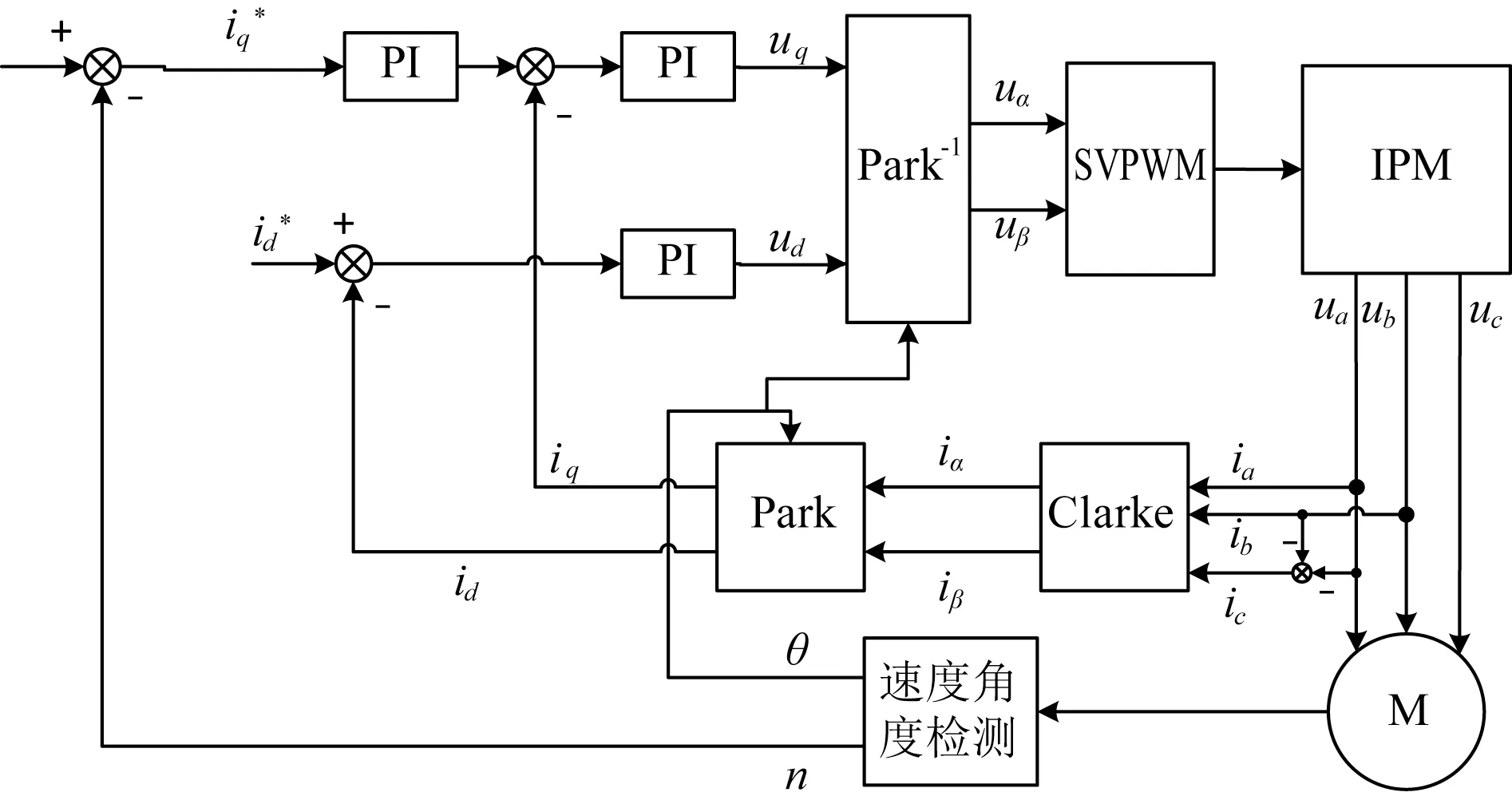
图2 PMSM矢量控制原理Fig.2 Principleof PMSMvector control
矢量控制的实现首先需基于目标扭矩计算旋转坐标系下设定d轴电流id*与q轴电流iq*,控制器根据电流传感器反馈的两相电流ia、ib或三相电流ia、ib、ic,经Clarke变换、Park变换得到旋转坐标系下的反馈电流iq、id。利用id、id*与iq、iq*,基于PI控制实现定子电流的闭环反馈控制,利用计算得出的uq、ud使反馈定子电流跟随设定定子电流。旋转坐标系下的dq轴电压通过Park逆变换转换为正交坐标系电压uα、uβ,经逆变器输出该电压对PMSM供电,实现矢量控制。
2 SVPWM的FPGA实现
FPGA因其并行的数据处理方式,可以同时处理多个运算模块,显著提高运算速度;具有框架灵活的特性,开发周期短,接口灵活;且FPGA技术发展迅速,其集成度更高,功耗降低[13]。矢量控制的FPGA实现采用Top-Down模块化的设计方式,其核心算法主要包括坐标变换模块、扇区判断模块、Cordic算法计算模块、矢量作用时间计算模块、PWM信号生成模块、死区模块等。其主要结构如图3所示。

图3 SVPWM算法结构Fig.3 SVPWMalgorithm structure
Cordic模块主要用于平方根计算与角度的正余弦计算。因为FPGA内部仅能直接实现加法与乘法,故需要通过迭代的方式实现。其实现思想为直角坐标系中初始点角度,通过n次迭代向所求点靠近,通过迭代点角度与目标角度之间的差值确定迭代方向,通过n次迭代,误差趋于0。
坐标变换模块涵盖第1节阐述的PMSM矢量控制坐标变换所需的Park变换模块、Park逆变换模块、Clarke变换模块。
扇区判断模块的作用是确定目标矢量在空间中的位置。扇区判断关系如表1所示。
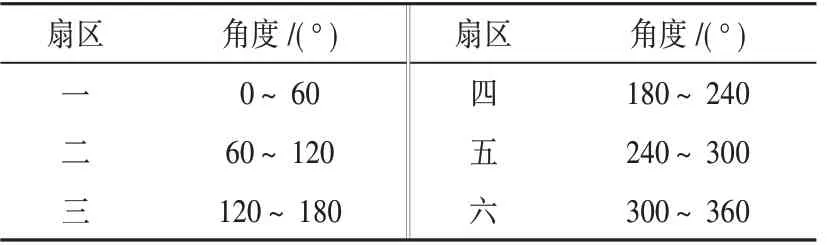
表1 扇区与角度关系Tab.1 Sector and Angle relationship
矢量作用时间计算模块可获得基本矢量作用时间,以用于矢量合成。根据空间矢量所处空间位置不同,其基本矢量作用时间不同,一、三、五区非零基本矢量作用时间为:

二、四、六区两个非零基本矢量作用时间为:
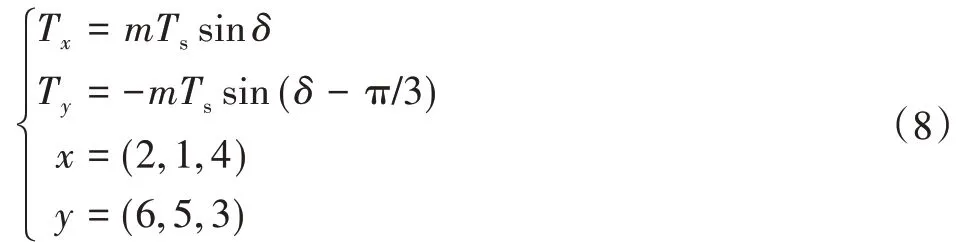
式中:Ts为PWM采样周期;m为调制系数;δ为d-q正交坐标系下,目标电压矢量与所处扇区起始边的夹角。
PWM信号生成模块采用七段式脉宽调制方法,每次仅有单个桥臂改变状态,降低开关损耗,减小IGBT发热,保证电机平稳运行。
死区时间模块的作用是防止IGBT相同桥臂上下桥臂同时非导通,故需要在PWM信号生成模块后加延时电路,产生死区时间,以防止短路,延时时长依据FPGA性能而定。其实现过程为,将坐标变换后得到的两正交电压矢量经反正切与平方根计算,输入到矢量作用时间计算模块与扇区判断模块,并将计算角度与位置检测环检测的电角度输入至扇区判断模块,输出目标电压矢量扇区与角度,经PWM信号生成模块生成六路PWM波,后经死区模块输出互补PWM信号。
3 台架实验
在同一台架按照GB/T 18488.2-2015电动汽车用电机及控制器测试标准对同一款永磁同步电机搭配以FPGA为核心的电机控制器与以DSP为核心的电机控制器分别进行扭矩响应与效率测试。结果表明,基于FPGA设计的电机控制器具备更优越的性能。
3.1 动态响应测试
对照组为DSP电机控制器匹配精进电机,实验组为FPGA电机控制器搭配同一款电机,台架ASM测功机参数为额定功率700 kW、最高转速6 000 r/min,搭配满足功率需求的功率分析仪与电池模拟器,恒温水冷系统冷却电机控制器、电机,使温度基本恒定,保证实验变量的唯一性。分别测试-500 N·m升扭矩至500 N·m,与500 N·m降扭矩至-500 N·m,通过台架记录响应时间,记录频率为1 000 Hz,部分结果如图4~7所示。处理数据如表2所示。

表2 扭矩响应时间测试Tab.2 Torqueresponsetimetest

图4 对照组400 r/min降扭响应测试Fig.4 Thecontrol group wastested for 400 r/min torquedrop response
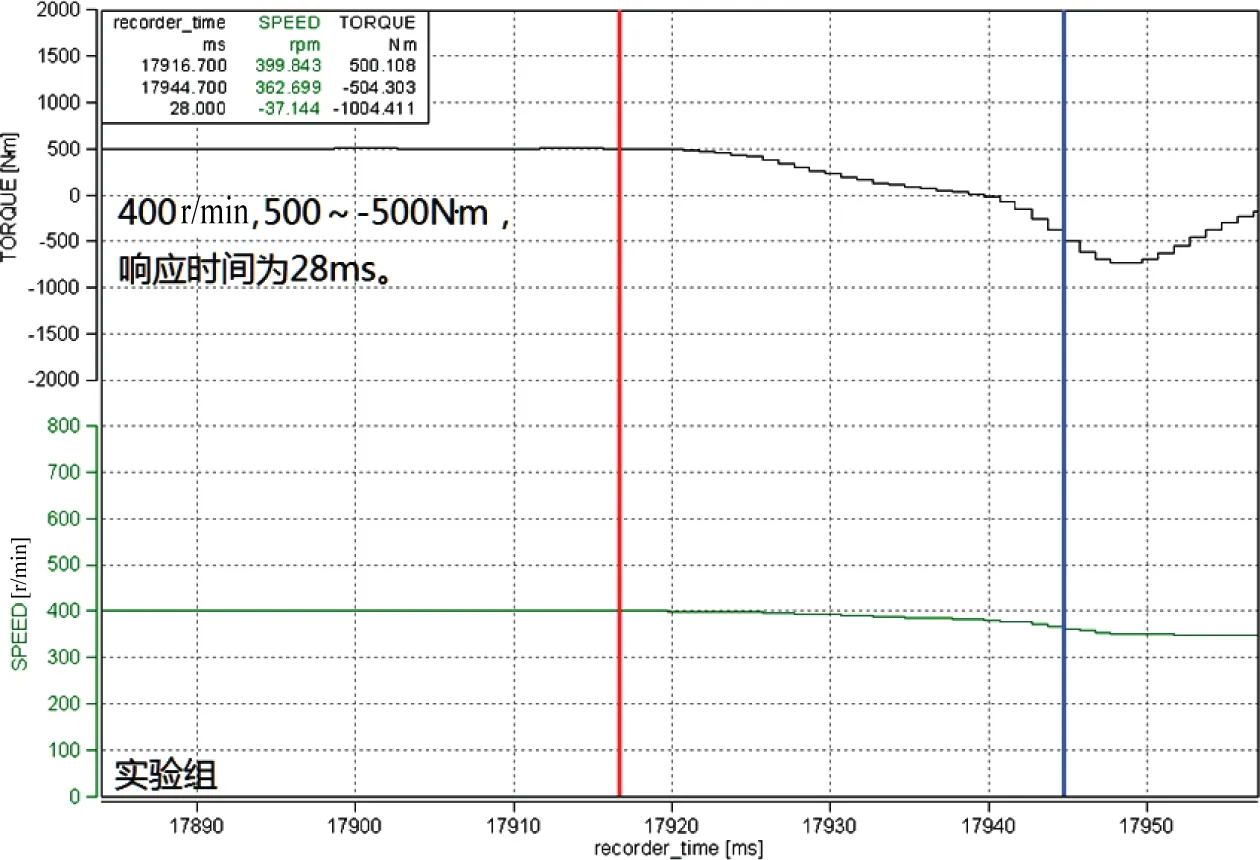
图5 实验组400 r/min降扭响应测试Fig.5 The experimental group was tested for 400 r/min drop torqueresponse
通过台架实验结果可知,FPGA控制器在不同转速下扭矩响应时间基本稳定在30 ms以内,响应速度明显优于以DSP为计算核心的控制器,响应速度提升25%~79%,且由测试结果,DSP电机控制器响应时间受工况影响大,不同工况下扭矩响应时间一致性差。
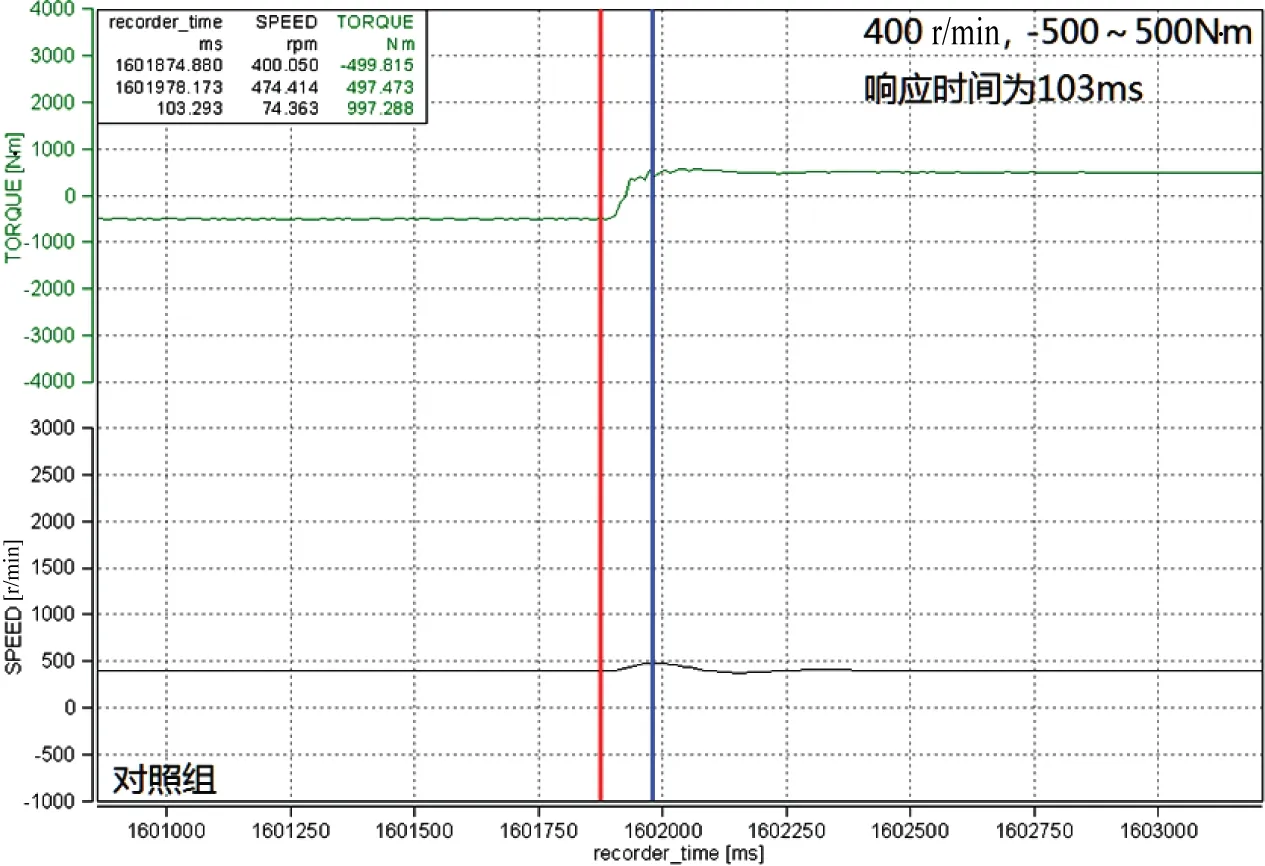
图6 对照组400 r/min升扭响应测试Fig.6 Thecontrol group wastested for 400 r/min lift-torsion response

图7 实验组400 r/min升扭响应测试Fig.7 Theexperimental group wastested for lift-torsion responseat 400 r/min
3.2 效率分析
对对照组、实验组分别测试相同工况系统效率,按照GB/T18488.2-2015,统计效率占比,结果如表3所示。由效率占比可知,基于FPGA的控制器提升了电驱动系统的整体效率,尤其是扩大了效率90%以上的高效区域。

表3 系统效率对比Tab.3 System efficiency comparison
4 结束语
本文研究了永磁同步电机空间电压矢量控制技术与以FPGA为核心的电机控制器设计实现。在详细阐述了永磁同步电机于旋转坐标系下的数学模型的基础上,分析了空间电压矢量脉宽调制SVPWM控制技术的原理,并基于此完成FPGA设计实现,最后利用实验台架分别测试了以DSP、FPGA为核心计算单元的电机控制器,以对比其性能。
通过实验验证,基于FPGA的电机控制器可用于永磁同步电机控制,且FPGA电机控制器具有扭矩响应快、动态性能好、提升驱动系统整体效率的作用,对于电机控制器设计与应用有重要的借鉴意义。
猜你喜欢
南北桥(2022年2期)2022-05-31 04:28:07
汽车实用技术(2022年7期)2022-04-20 11:45:04
装备制造技术(2021年4期)2021-08-05 07:39:22
防爆电机(2021年1期)2021-03-29 03:02:46
装备制造技术(2020年11期)2021-01-26 00:39:04
测控技术(2018年2期)2018-12-09 09:00:52
电脑知识与技术·经验技巧(2017年9期)2018-02-24 19:55:20
西南交通大学学报(2016年4期)2016-06-15 20:29:36
计算机技术与发展(2016年10期)2016-02-27 00:44:08
中国石油大学学报(自然科学版)(2015年2期)2015-11-10 06:08:08
