
3-UPS/UR 并联机构运动学与控制分析
2022-05-12 07:38郭忠峰赵启航
一重技术 2022年2期
郭忠峰,赵启航
并联机构具有刚度大,累计误差小,承载能力高和运行平稳等特点[1~4],目前已经广泛应用于许多领域[5]。利用计算机仿真软件对并联机构的运动特性和控制方法进行仿真可以快速精准得到并联机构各项参数,缩短机构的设计周期,通过仿真也可以快速找到并改正设计错误,提高工作效率。
本文通过ADAMS 和Matlab 及其仿真模块,对并联机构进行运动学分析;通过SIMULINK 仿真模块对机构系统进行控制仿真。
1 并联机构模型建立及运动学分析
3-UPS/UR 并联机构由上、下平台,三根驱动支链和一根恰约束支链组成,其中约束支链包含3个球副(S),3 个移动副(P) 和3 个虎克铰(U),恰约束支链包含和一个转动副(R) 和一个虎克铰(见图1)。令上平台的几何中心为m,下平台几何中心为M,由M 指向m 方向为Z 轴方向,两点间距离为360 mm。分别以上、下平台的几何中心为原点建立两个坐标系m-xyz 和M-XYZ,下平台中的3 个虎克铰按圆周布置,任意2 个虎克铰中心点与下平台中间连线夹角为120°,几何中心到虎克铰的距离为300 mm,上平台中的球副同下平台布置方式一致,几何中心与球副中心点距离为200 mm(见图2)。
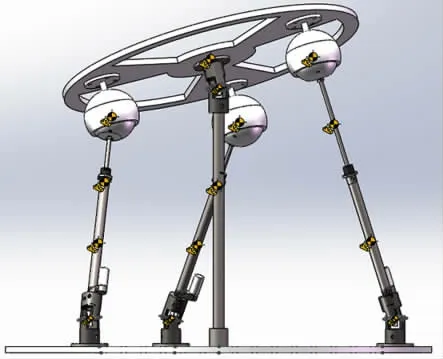
图1 3-UPS/UR 并联机构三维模型
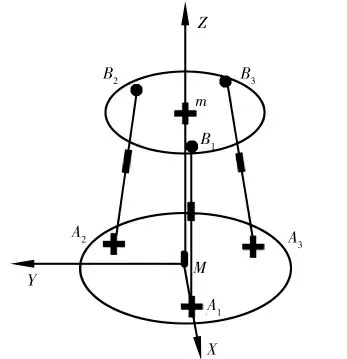
图2 3-UPS/UR 并联机构简图
可以得到下平台中3 个虎克铰在坐标系MXYZ 下的坐标和上平台中3 个球副在坐标系m-xyz下的坐标。
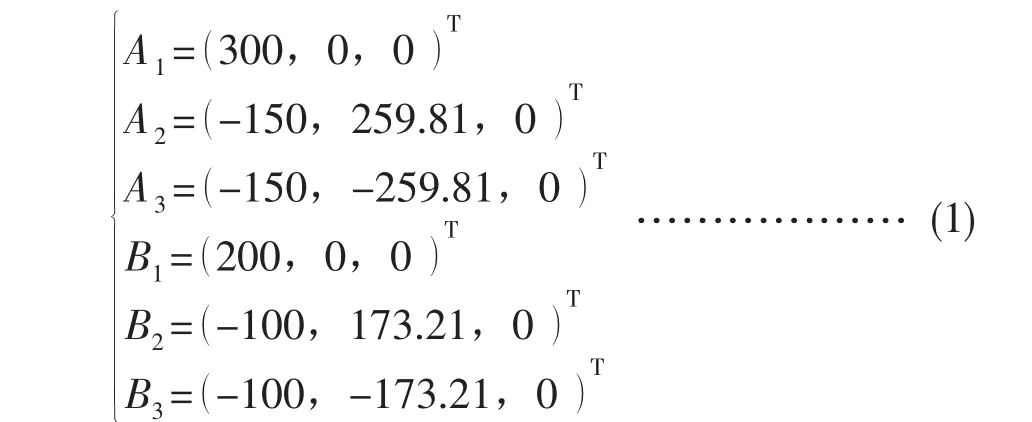
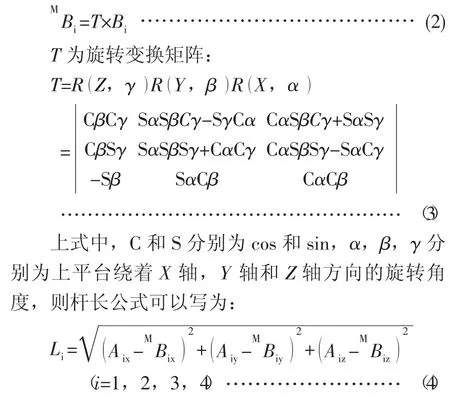
将上平台坐标系与下平台坐标系统一,通过式(2) 进行变换:
2 并联机构ADAMS 运动学正解仿真
将上面建立的并联机构三维模型导入ADAMS中,添加约束,在上平台的中心点建立驱动,本机构为空间三自由度机构,方向为上平台分别绕着X轴,Y 轴和Z 轴转动,所以只需要对三个转动驱动设置参数(见图3)。令上平台的运动规律如式(5) 所示,并联机构绕X 轴的最大转动范围为±20°,绕Y 轴转动最大范围为±5°。运行ADAMS,设置仿真时间为24 s,运动步长为0.01,得到并联机构的运动学正解。
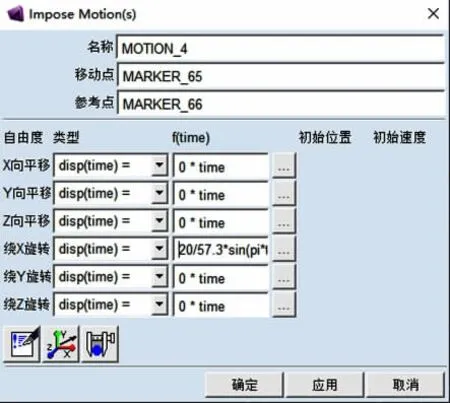
图3 ADAMS 仿真驱动模块参数设置
通过仿真,驱动支链L1和L2的位移变化可近似看作三角函数,曲线变化平滑(见图4),并联机构的最大速度约为30 mm/s,曲线整体平缓,无突出点,便于控制(见图5)。
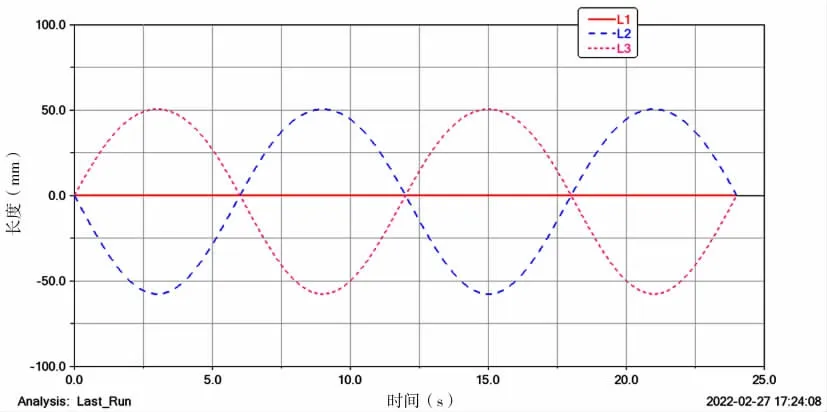
图4 并联机构ADAMS 仿真所得杆长位移变化曲线
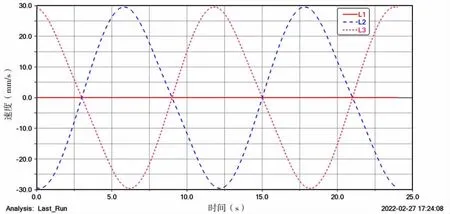
图5 并联机构ADAMS 仿真所得杆长速度变化曲线
3 并联机构控制系统搭建
3-UPS/UR 并联机构通过对三个驱动支链上的移动副运动,可以达到改变上平台位姿的效果。本机构的移动副采用直线电动推杆结构,采用无刷直流电机(BLDCM) 驱动推杆。直线电动推杆结构包括无刷电机,同步轮,轴承,活塞,导向套及活塞杆等(见图6)。
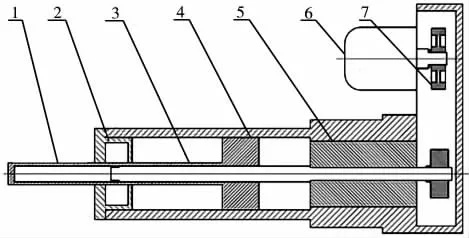
图6 直线电动推杆结构截面图
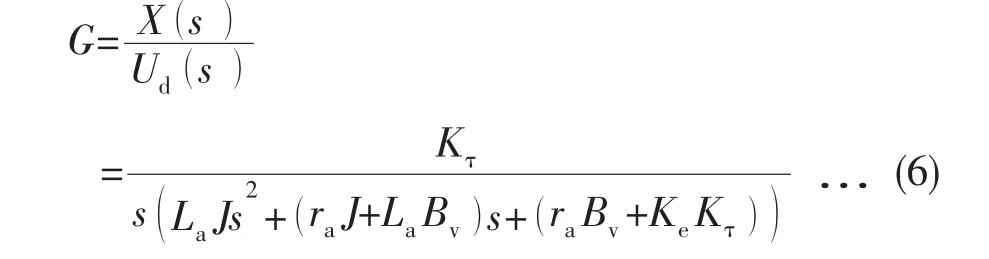
直线电动推杆系统通过输入电压U,经过无刷电机将其转化为电机系统的电刷电流I,框图中的ra为绕组线电阻,La为等效线电感,Kτ为电机系统的转矩系数,J 为电机系统的转动惯量,Bv为粘性摩擦系数,Ke为反电势系数,经过运算得到电机的转动角速度,并将转动角速度转换得到的伸长量为直线电机系统的输出值X(见图7)。由此框图可以写出其传递函数式(6)。本文无刷直流电机型号为EC-4pole-100W,相关参数可见文献[6]

图7 直线电动推杆系统框图
直线电动推杆系统采用双闭环PID 控制(见图8)。其中ASR 为系统的速度调节器,ACR 为系统的电流调节器,通过PWM 进行调速。将每次的反馈电流和反馈速度输入PWM 调速系统中对直线电机系统进行调速,以达到控制要求。其中ASR调节器的PID 参数值分别为10,2,0.2,ACR 调节器的PID 参数值分别为10,0.5,0.01。将转速图中的各个数据点输入双闭环系统,最后输出转速为电动推杆系统中活塞杆的轴向位移速度和转速误差(见图9~图10)。

图8 直线电动推杆系统双闭环PID 控制框图
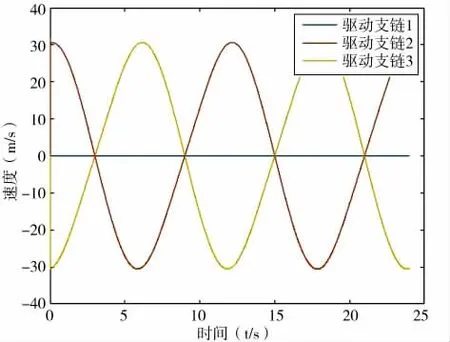
图9 经过PID 转换后的直线电动推杆系统速度
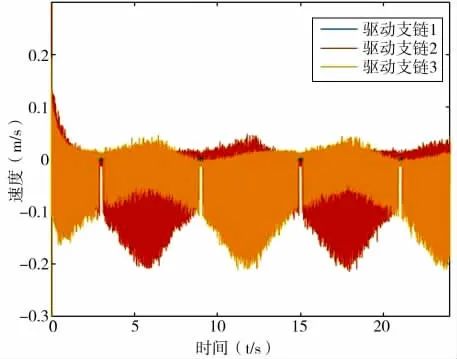
图10 转速跟踪误差
可知,经过双闭环PID 变换后,直线电动推杆系统的输出速度与输入值基本一致,误差在0.3 mm/s 之内,满足控制要求。
将ADAMS 仿真软件与SIMULINK 模块对接,在SIMULINK 模块中导出ADAMS_sub 模块,建立联合仿真框图(见图11)。其中,signial 模块为速度信号输入模块,motor1-3 为电机控制模块,adams_sub 为ADAMS 联合仿真模块。
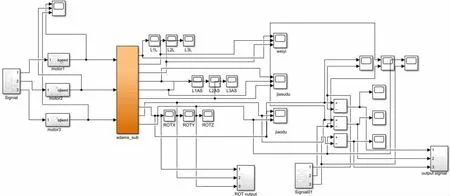
图11 ADAMS-SIMULINK 联合仿真框图
SIMULINK 模块设置仿真时间为24 s,仿真步长为0.000 1 s,预期结果为并联机构的上平台会绕着X 轴以12 s 为周期呈近似正弦运动,Y 轴和Z轴不转动。最后得到并联机构上平台的角度变化(见图12~13),由于Y、Z 两轴不转动且变化量小于0.000 01 mm,所以本文不做讨论,只分析并联机构绕X 轴的转动情况。
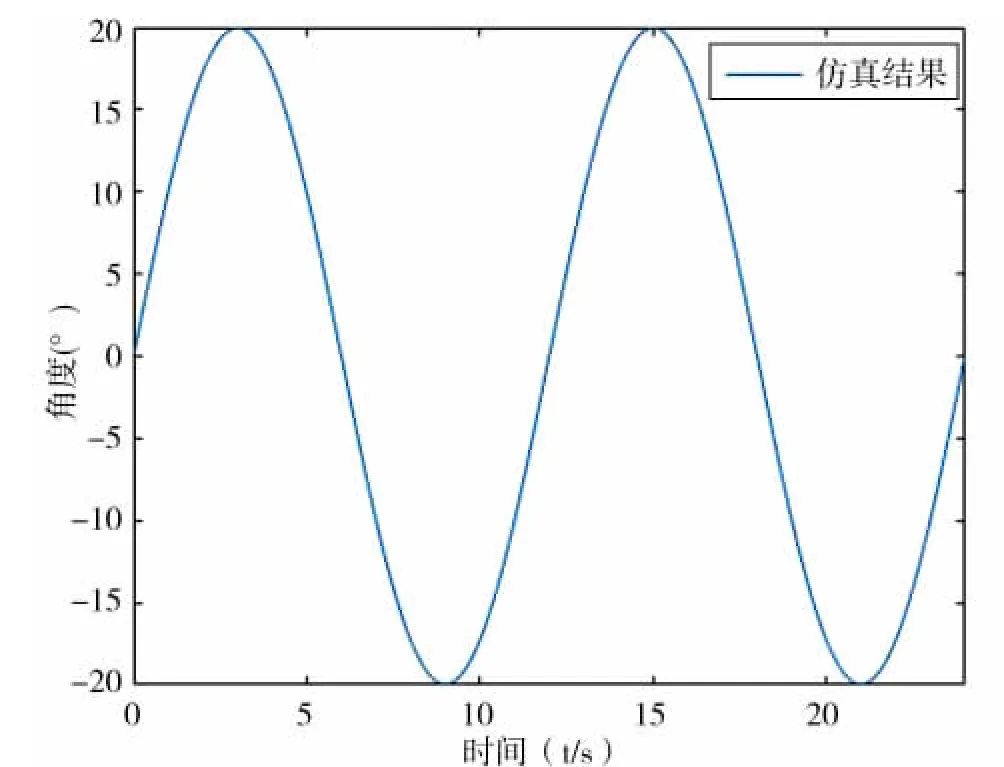
图12 联合仿真中上平台绕X 轴转动角度曲线
由图可知,联合仿真中并联机构的上平台绕X轴转动与预期结果基本一致,周期内误差均小于0.06°,满足控制要求。
4 结 语
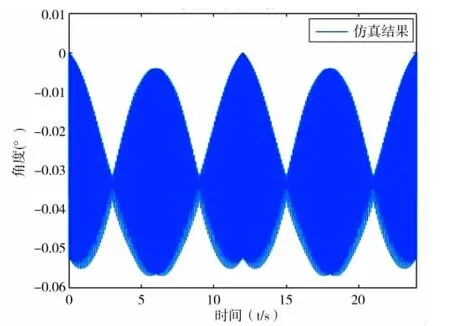
图13 联合仿真中上平台绕X 转动角度误差曲线
本文对3-UPS/UR 并联机构的运动学部分进行分析,建立并联机构的杆长方程,通过ADAMS 对并联机构的运动学正解仿真绘制杆长的运动学曲线,利用SIMULINK 模块搭建并联机构的控制系统,以及并联机构驱动支链的传递函数模型,通过PID 控制方法对驱动支链进行仿真控制,得到转速和转速误差曲线,最后通过联合仿真得到并联机构上平台的转动规律。通过运动学分析和控制仿真得到并联机构的运动学特性曲线及控制参数,仿真结果表明并联机构PID 控制效果较好,所得到的参数为后续控制系统优化提供依据。
猜你喜欢
中国机械工程(2022年20期)2022-10-31
汽车实用技术(2022年16期)2022-08-31
酿酒科技(2022年3期)2022-03-30
农业机械学报(2022年2期)2022-03-14
汽车电器(2022年2期)2022-03-01
内燃机与配件(2022年2期)2022-01-17
冰雪运动(2020年5期)2020-03-29
科技创新导报(2016年4期)2016-11-19
演艺科技(2016年9期)2016-05-14
新高考·高一物理(2016年1期)2016-03-05
