
基于RobotStudio 机器人视觉位姿引导虚拟仿真
2022-05-11 07:02耿永秀项余建郭金山詹俊勇
锻压装备与制造技术 2022年2期
耿永秀,项余建,曹 伟,郭金山,陈 森,詹俊勇
(扬力集团股份有限公司,江苏 扬州 225000)
1 引言
随着现代工业的不断升级,自动化生产线已成为一种趋势。自动化的发展不仅降低了劳动成本,提高工作效率,而且可以解决实际生产制造难点[1]。而RobotStudio 仿真软件的应用,不仅在实践中减少操作的风险,减少购买设备的成本,还能够通过计算机进行现场模拟,降低了设备成本和安全风险[2]。
近几年来机器视觉技术在工业生产中得到了广泛应用。在工业机器人应用领域,机器视觉被广泛应用于工件的特征检测以及机器人的位姿引导,ABB机器人在控制器中开放了视觉集成接口,以便于机器人能够直接与智能相机进行数据交互。除了现实的机器视觉应用以外,在机器人仿真过程中可以对机器视觉进行仿真。在仿真的过程中,能够对机器人路径进行优化,对现场调试具有指导意义,同时能够避免企业对设备过度投入、缩短现场调试时间[3]。
2 工作站的布局
在仿真工作站添加一台IRB6700 机器人,导入机器人端拾器、上料皮带、视觉支架、机器人底座等模型。同时使用“建模”菜单中的“圆锥体”建模工具创建一个圆锥体,并修改圆锥体透明度,作为相机光源。将端拾器安装到机器人上,相机光源分别放置到合适位置处,并创建机器人控制系统,机器人与视觉系统创建完成后,如图1 所示。

图1 工作站布局
3 仿真系统设计
ABB IRB6700 型机器人一般运用于自动化搬运系统场合,由机器人按照一定的规律来运送板料,该仿真工作流程是机器人搬运至视觉皮带线,传送至视觉照相范围内,相机拍照识别物料,机器人准确抓取放置下一台冲床,重复完成这个动作。流程图如图2 所示。
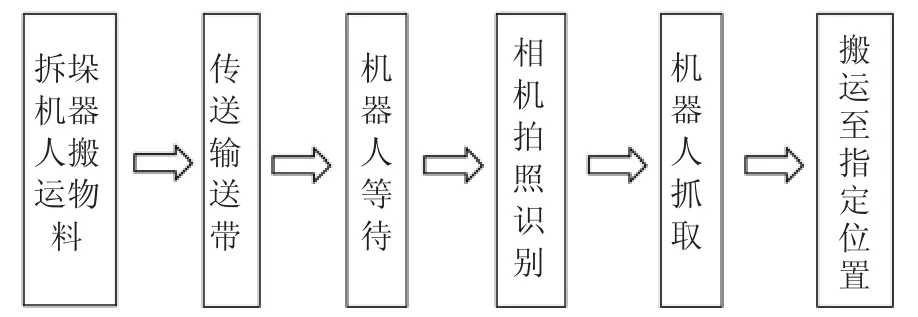
图2 流程图
3.1 机器人工件坐标系添加
对于机器人位置与姿态的视觉引导,首先,创建工件坐标系、工具坐标系,在创建工件坐标中,用户坐标框架下使用“三点”法,在视觉皮带右侧位置处,创建一个工件坐标系,坐标轴方向与大地坐标系保持一致。工件坐标系创建完成后,将仿真环境中创建的工件坐标系以及工具坐标系同步到机器人控制器中。
在“RAPID”程序下打开机器人程序模块Module1,程序代码如下。编辑窗口中声明机器人在x、y轴上的位置偏移变量PosXY 以及在z 轴上的旋转变量OrientRz。
PERS pos posXY:=[0,0,0];机器人在x、y 轴上位置偏移变量
PERS orient orientRz:=[0,0,0,0];机器人在z 轴上的旋转变量
3.2 皮带输送Smart 组件创建
分别设置LogicGate_5、LogicGate_6 子对象组件“OR”与“NOT”操作。配置线性传感器LineSensor_Front 属性,面传感器PlaneSensor 属性,拾取机器人输送带开始平面上两点作为传感器起始位置与结束位置,设置传感器半径为10mm,拾取输送线末端x 轴和z 轴两个点。配置线性移动子对象组件LinearMover 属性,设置移动速度为1000mm/s,其他属性保持默认,皮带输送组件如图3 所示。

图3 皮带输送组件
3.3 视觉引导Smart 组件创建
创建的工件位置随机生成仿真环境中的Smart组件中,添加2 个RapidVariable 控制子对象组件,其中一个用于向机器人发送视觉检测到的工件位置偏移数据、另一个用于向机器人发送视觉检测到的工件姿态偏移数据。对两个RapidVariable 子对象组件进行属性配置,以实现将视觉检测到的工件偏移数据分别发送到在机器人程序中声明的数据变量PosXY、OrientRz 中。对于相机的控制,这里使用2 个LogicGate 子对象组件、1 个Show 子对象组件、1 个Hide 子对象组件。使用Show与Hide 子对象组件对相机光源进行显示/隐藏操作,实现相机光源的闪烁仿真效果。在Smart 组件中添加1 个脉冲信号输出子对象组件LogicSplit。再分别创建1 个数字量输入信号di1 与1 个数字量输出信号do1,用来作为视觉引导Smart 组件的控制与反馈信号。对修改后的视觉引导Smart 组件属性传递关系与信号控制逻辑分别进行设置,设置完成后,如图4 所示。

图4 视觉引导组件
4 机器人示教编程
在机器人控制器中分别创建输入信号di1 与输出信号do1,虚拟信号用于与Smart 组件中的控制、反馈信号进行连接。在RobotStudio 软件的仿真环境中对机器人进行示教编程,机器人运行轨迹如图5所示,示教编程过程中除了示教点以外,其他工作点全部使用创建的工件坐标系,工具全部使用端拾器工具。

图5 机器人运行轨迹
将在仿真环境中示教点同步到机器人控制器中,在“RAPID”菜单栏中将其打开,部分程序如图6所示。

图6 程序
5 结论
采用Robotstudio 仿真软件搭建视觉生产线搬运工作站。根据ABB6700 机器人在实际工业视觉对中搬运,设计了生产线上自动抓取物料仿真工作站,该仿真工作站可以根据实际情况离线编程,缩短了机器人现场调试的周期,大大提高了效率,为工业机器人更好地完成生产线上各项任务提供了实验数据和理论依据[1]。
猜你喜欢
杭州电子科技大学学报(自然科学版)(2022年4期)2022-08-23
杭州电子科技大学学报(自然科学版)(2022年3期)2022-06-08
导航定位学报(2022年2期)2022-04-11
智能制造(2021年4期)2021-11-04
计算机与数字工程(2021年7期)2021-08-08
语数外学习·高中版中旬(2021年11期)2021-02-14
启迪与智慧·上旬刊(2019年5期)2019-09-10
作文·初中版(2019年8期)2019-09-09
考试周刊(2018年15期)2018-01-21
中学生数理化·七年级数学人教版(2017年4期)2017-07-08
