
基于卷积神经网络车辆行驶的识别预警系统
2022-05-07 11:22:48吕东芳宋雷震
青岛理工大学学报 2022年2期
吕东芳,宋雷震
(淮南联合大学 a.信息工程学院;b.智能制造学院,淮南 232038)
工业革命的发展使得社会生产力得到了显著的提升,社会经济也随之而持续发展,人们的出行方式也产生了显著的改变。汽车已经成为21世纪使用最为广泛的交通工具,然而与此同时也出现了大量的交通事故,因此对车辆行驶的识别预警系统进行优化迫在眉睫。车辆预警系统可以协助车主避免高速、低速追尾等事故的发生,有效地避免车辆偏离车道、与人碰撞等事故,还可以帮助观察道路险情,不断检测分析前方道路的情况,识别和判断各种潜在危险状态。并且最重要的一点就是可以通过不同的声音和视觉来提醒驾驶员有效避免事故的发生。
卷积神经网络作为一种深度学习的模型,能够对样本的深层特征进行有效提取,在处理类似网络结构的数据时,具有极强的准确性与可行性,因此卷积神经网络被广泛应用于多项领域之中。本文将针对卷积神经网络的模型架构,以及其在车辆行驶识别预警中的应用进行深入的探析,旨在为车辆行驶的识别预警系统的优化提供一定的参考价值。
1 卷积神经网络在车辆行驶识别中的作用机制
1.1 卷积神经网络模型架构
卷积神经网络是应用最为广泛的一种人工神经网络,具有深度前向反馈机制,能够对所有待检图像的像素进行准确高效的响应[1]。卷积神经网络还具有多层次的相关特点,其中每一层的元素均由若干个二维平面所构成,该种二维平面可被定义为相应的二维特征图。卷积神经网络的基础模型结构如图1所示。
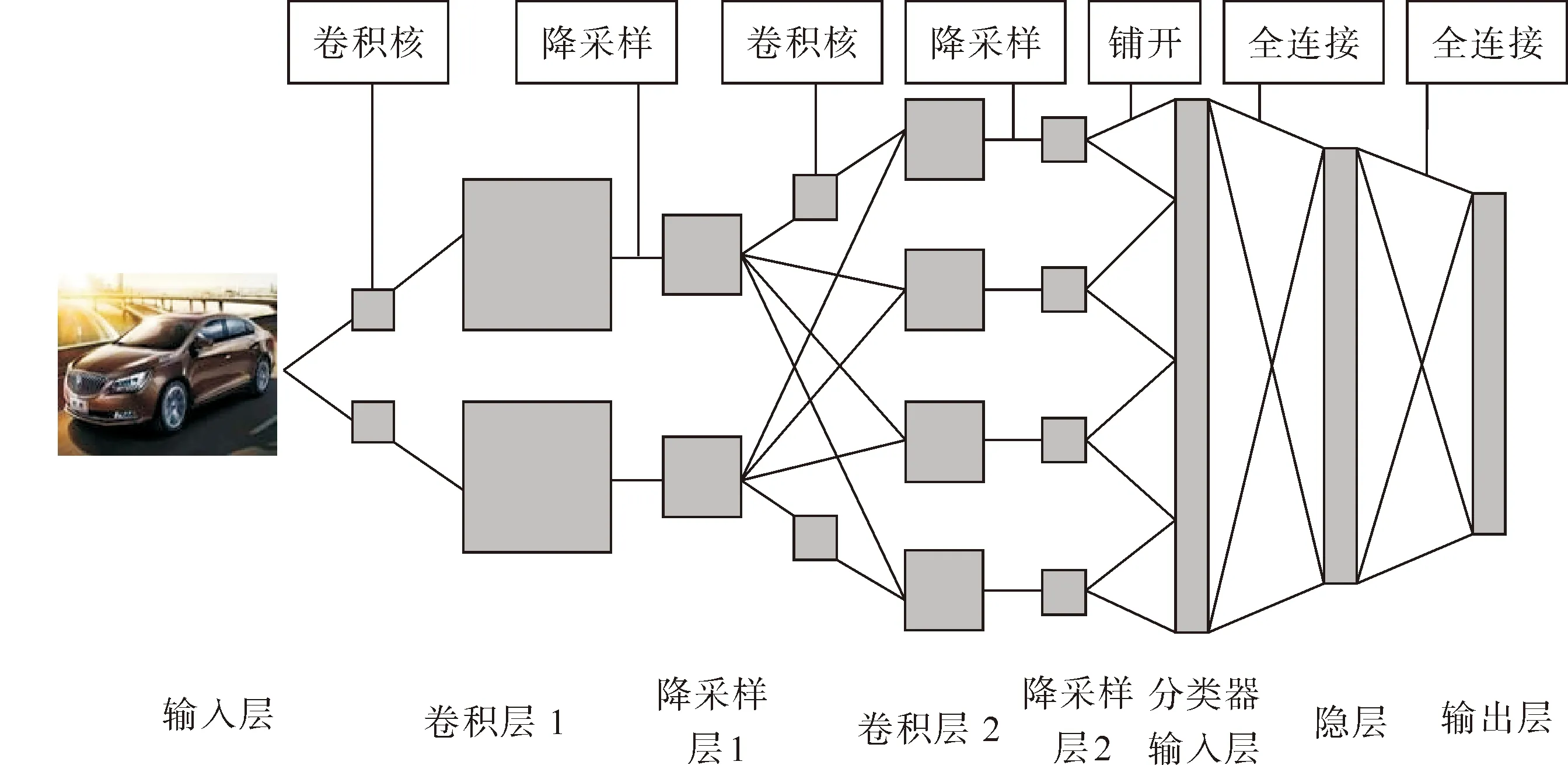
图1 卷积神经网络模型结构
通过图1可知,在卷积神经网络中,每一个单独的二维平面上均存在着若干个不同的神经元,各个神经元节点均对应着二维特征图中的所有特征点。卷积神经网络模型结构中包含了输入层、卷积层、降采样层、分类器输入层、隐层以及输出层[2]。在上述模型的基本结构中,重点是特征提取器与分类器,其中特征提取器指的是由多个卷积层与降采样层组成的结构。图1中第1层为输入层,是一个二维图像,通过多个卷积核与输入层进行卷积运算,以获取到若干特征图,由获取到的特征图进一步构成卷积层。卷积运算是指卷积核持续不断地在目标图像之上进行上下左右多方位的移动。由于图像特征具有一定的丰富性与多样性,且每个卷积核仅仅可以提取到图像中的单一特征,因此需要大量的卷积核参与到卷积运算的过程中,才能够全面完整地提取到目标图像的各种特征。在此之后,该模型会对特征图进行降采样的操作,达到使特征图尺寸缩小至适宜范围的目标,以优化计算过程,降低计算的难度,该步骤完成之后即可成功构成降采样层。通过数次卷积与降采样处理后,特征图的尺寸达到适宜状态,且数量有所增加,对图像特征的识别能力得到进一步提升。最后分类器将会对所得特征图进行铺展处理,进而形成一个目标特征向量,为分类识别做准备,最终输出检测识别的相关结果[3]。在传统的卷积神经网络中,所有网络都包含了数量巨大的节点,而相邻的网络层之间的所有节点,必须满足全部相连的状态,全连接示意如图2所示。
由图2可知,所有的网络层在运行过程中,均会通过节点运算而产生大量的参数,使得网络训练的难度有所提升。为了减小整个网络层的计算量,完成网络训练,需要采取一定的措施来减少参数的数量,以期提高运算的速度与精度,通常可使用局部感知与权值共享2种方法。在将图像像素的连接方式转换为局部连接后,像素之间的连接有所减弱,需要在图像的局部感知区域进行多次重叠采样处理,以加强像素之间的联系[4]。重叠采样中移动的像素个数小于卷积核的边长个数,运算示意及输出结果如图3所示。

图2 卷积神经网络全连接示意
图3中展现了卷积运算的具体形式,其中移动的像素个数被称之为步长。从图3(a)中可看到特征图像的尺寸为5×5像素;黄色部分为卷积核,尺寸为3×3像素。以卷积核部分的数值与红色数值做点积运算,且根据由左至右、由上至下的方向进行移动,即可得到卷积输出结果(图3(b)),即一个大小为3×3的矩阵特征图。在实际的卷积运算中,还需要对获取到的卷积结果设置一个偏置系数,使得最终输出层的尺寸为[(r-a)/k+1]×[(r-a)/k+1],其中r为输入层的尺寸边长,a为卷积核的边长,k为步长。

图3 卷积运算操作示意
1.2 基于卷积神经网络算法的车辆识别预警系统构建
车辆的识别预警系统既需要考虑两车间的安全距离,又需考虑碰撞时间,二者兼顾才可制定出合理的防撞预警策略,进而保障人们的行车安全。结合1.1卷积神经网络的相关内容与特性,构建出车辆识别预警系统,如图4所示。
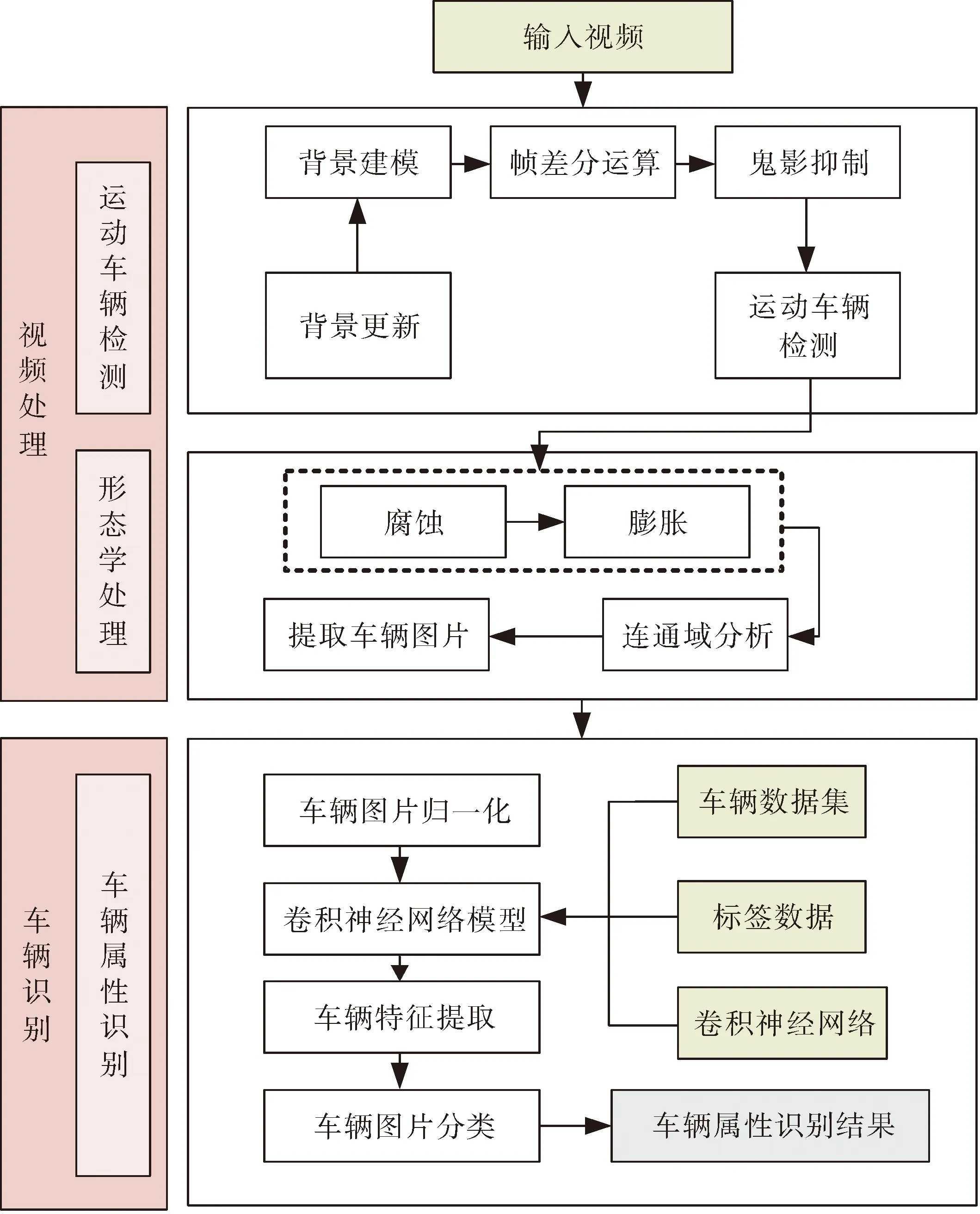
图4 基于卷积神经网络的车辆识别预警系统
基于卷积神经网络车辆行驶的识别预警系统主要分为2个部分:①视频处理,获取车辆图像;②车辆识别,获取到相关的车辆识别结果。视频处理通过相关的运动目标检测算法,在图像形态学的基础上获取到车辆图像[5]。车辆识别包含4个主要部分,分别为车辆图片归一化、卷积神经网络模型、车辆特征提取以及车辆图片分类。在具体的识别过程中,将卷积神经网络算法应用至视频处理的输出中,对车辆图像进行归一化处理,以满足卷积神经网络的输入条件。在识别到基础的车辆图像特征信息之后,依据该目标在图像中的位置,综合利用摄像机参数与几何关系,获取两车之间的实际距离;根据车辆行进信息,包括行驶速度与加速度,来计算两车的碰撞时间;其投影模型是一种理想状态的几何模型,车距估算示意见图5[6]。
图5中的斜线区域为水平地面车辆行驶区域,A与B分别表示自车与前车,摄像头P安装于A车前轮后侧上方后视镜位置,B车采集点在后车轮与地面切点,近似于B车后轮中心,方便通过几何投影计算两车距离。两车之间的实际距离以Z来表示;P点为A车摄像头的位置所在,由于其相对体积较小,因此可视作一个质点;f为焦距;H为质点P与水平地面间的距离;y表示A车和水平线的接触点与垂线上端交点的距离。由此可得y/f=H/Z,则两车之间实际距离Z的计算公式如下:

图5 基于图像几何原理的车距估算
Z=f×H/y
(1)
在A车摄像头参数的设定完成后,式(1)可改写为式(2):
Z=f×H/y=F×H/Y
(2)
式中:F为A车摄像头的等效垂直焦距;Y为B车底部到图像中线位置的像素数。
随后需要对碰撞时间进行计算,令不同时刻中车辆在图像中大小的变换关系为h,则
h=Z0/Zt
(3)
式中:Z0,Zt分别为初始时刻和t时刻由图像中检测到的车宽。
在Δt时间内,两车均做匀速运动,且保持着一定的相对速度,则
(4)
式中:v为速度差。
将A车在制动时产生加速度的情况纳入考虑,则在Δt时间内车距为
Z(Δt)=0.5×a×Δt2+v×Δt+Z0
(5)
式中:a为制动参数。
令碰撞时间为G,由式(1)—(5),以及几何关系,可得碰撞时间:
(6)
完成两车距离与碰撞时间的估算后,可正式制定避撞预警策略。由于在车辆行驶过程中,路况形式具有多样性,车辆数量也处于不可控的状态,因此视频录像中会出现多辆车,实际进行两车距离与碰撞时间的计算时会出现多个车辆及相关参数,增加计算量[7]。在一定程度上对预警的准确性造成消极影响,因此需要对前向碰撞的可能性进行分析,如图6所示。
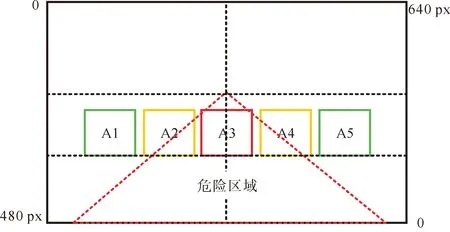
图6 前向碰撞可能性分析
从图6中可以看到,视频录像中可能出现A1至A5多辆车,应该具有针对性地选取最易产生碰撞的车辆进行分析。由于A3与A4位于同一行车道,仅需要分析A4与A3之间的距离和碰撞时间,就可以确保行车安全。设两车之间的安全车距为D,当Z>D时,车辆行驶处于安全状态;当Z 通过对卷积神经网络进行深入分析,构建出基于卷积神经网络的车辆识别预警系统,进行多次实验分析。在实际的分析过程中,实验车辆囊括了多种颜色、尺寸、品牌的车型,综合考虑了诸多外界条件因素,如光照强度与天气环境等,以此来确保实验的可信度与准确性[9]。除图3中的运算形式结构外,此次研究中还设置了两组不同配置的网络,作为对照组,其参数设置如表1所示。 表1 对照组参数设置 根据表1可知,α组的结构是在图3中结构上进行增添,使每层的特征图数有所增加;β组的结构相对于图3结构而言,改动较少,仅减少最后一层。最终α、β和图3对单样本车辆进行计算的平均时间分别为0.0167,0.0323以及0.0135 s;准确率分别为97.89%,94.06%以及98.64%。通过对比可知,本次研究中图3结构趋于完美,其对样本车辆进行识别的正确率最高,且耗时较短。而α组与β组只能在正确率与耗时上占据1项优势,无法做到兼并。3种结构网络的测试ROC曲线如图7所示。 图7直观地展示了3种不同结构网络的识别率,图3结构为最优结构,其正确率高且耗费时间短。检测错误的样本车辆大都属于坏样本,坏样本覆盖的类型主要为三种,分别为含有过多背景的车辆样本、仅含有局部信息的车辆样本,以及远距离时的模糊车辆样本。另一方面,此次研究还针对不同路况条件进行了大量实验,识别检测结果见图8。 如图8所示,在图8(a)—图8(j)10种不同的路况条件下,基于卷积神经网络的车辆行驶识别算法均可以对前方车辆进行有效地检测识别,进而计算自车与前车之间的实时车距与碰撞时间,准确地实现相关的预警操作。然而在图8(k)和图8(l)中,由于雨天与夜晚的自然条件相对恶劣,导致自车前挡风玻璃变得模糊,前车底部到图像中线位置的像素数无法进行测量,进而导致该算法出现失败。大部分情况下,基于卷积神经网络的车辆行驶识别算法仍然可以满足基本的识别预警需求。为进一步检测此次研究中识别预警技术的性能,将传统的遗传算法与基于卷积神经网络的算法进行对比,分析在实际识别预警过程中所耗费的时间,结果如图9所示。 图8 不同场景与路况下的车辆检测结果 图9中显示了2种算法的识别耗时对比,横轴表示车辆图像序列,为了确保识别的精度,每10帧为1个单位;纵轴表示该算法处理10帧的车辆图像所耗费的时间。由图9可知,2种识别预警方法在耗时上具有显著的差别,传统的识别预警方法耗时较长,而基于卷积神经网络车辆行驶的识别预警方法更为快捷高效,其耗时远远低于前者,且浮动较小,更加趋于稳定,能够满足车辆图像信息处理的要求。 将卷积神经网络作为研究的重点对象,深入分析了卷积神经网络的原理,并将其灵活地运用到车辆行驶的识别预警系统中,并进行多次对照实验。研究结果显示,基于卷积神经网络的车辆行驶识别预警系统具有较强的准确性,且进行识别与预警等操作的耗时较短,可以大量地投入到实际交通系统中,实现对驾驶员和车辆的实时安全预警,并实时将行车过程中采集的各类报警信息,如:前碰撞报警、车道偏离报警、行人碰撞报警、安全车距预警、急加速/减速报警、急转弯报警、疲劳驾驶报警等信息和视频图像上传至云端,达到远程监管和统计分析驾驶行为的目的,有效改善驾驶员不规范驾驶行为,提升管理水平,防范事故于未然。2 实验与分析




3 结束语
猜你喜欢
中学生数理化(高中版.高考数学)(2022年1期)2022-04-26 14:09:30
汽车实用技术(2022年4期)2022-03-07 03:47:54
民用飞机设计与研究(2020年4期)2021-01-21 09:15:50
数学小灵通(1-2年级)(2020年6期)2020-06-24 05:57:54
河南科学(2020年3期)2020-06-02 08:30:14
电子制作(2019年11期)2019-07-04 00:34:36
莫愁·时代人物(2018年7期)2018-09-12 11:19:18
莫愁(2018年20期)2018-07-19 08:44:52
电子测试(2018年1期)2018-04-18 11:53:56
中国交通信息化(2017年12期)2017-06-06 07:23:53
