基于FESTO实验平台的机械手液压系统的设计与实现
2022-05-06 07:39:14彭先丽李红宇
中国新技术新产品 2022年3期
彭先丽 李红宇 王 伟
(昆明铁道职业技术学院,云南 昆明 650208)
0 引言
液压搬运机械手是一种可以实现自动抓取、搬运和操作的机械装置。机械手能按照给定的工艺要求完成各种复杂的动作。机械手在一定程度上能取代人的操作,可以节约用工成本,还可以在一定程度上提高生产效率,从而加快机械化和自动化的进程。随着科技的发展,机械手在现代制造业中的作用越来越明显,已成为现代制造业中很重要的一部分,但在实际应用中,普通的机械手没有传感器反馈能力和自动调节能力,很难检测外界环境或工件位置的变化情况,导致机械手出现损坏的现象。而且,在实际应用中通常以气动机械手为主,由于气压传动输出的力相对较小,因此气动机械手只能在输出负载小的场合中应用。
基于上述原因,该文设计了基于液压控制的机械手系统,该系统不仅能提起、移动以及放下物体,而且输出力较大,该液压系统能代替人的繁重劳动,达到生产自动化和机械化的目标。通过该机械手液压系统的设计、仿真分析及试验运行调试可知,机械手液压系统的设计基本达到自动抓取、搬运和运动平稳等性能要求。
1 机械手液压控制系统总体设计
该机械手液压系统能控制机械手手臂做出上升、下降、伸出、缩回、回转以及手指松开、夹紧等动作,整个控制系统主要包括液压系统回路、电气控制回路、各种传感器以及行程开关等,该文在设计中采用多个传感器和行程开关对机械手在运行过程中的位置进行监控。
1.1 机械手液压系统设计及原理分析
该文设计的机械手采用液压驱动方式,具体原理如图1所示,采用液压缸来完成机械手手臂收缩、手指夹紧、手臂升降和手臂回转等动作。根据工况要求,该执行机构要具有机械手手臂升降、伸缩、回转和手指松夹等功能。执行部件的机械部分由手臂的升降机构、伸缩机构、回转机构及手指松夹机构等组成,每个运动部分都由液压缸来驱动与控制。机械手的动作循环过程如下:手臂上升→手臂前伸→手指夹紧(抓料)→手臂回转→手臂下降→手臂松开(卸料)→手臂缩回→手臂反转(复位)→原位停止。
在机械手液压系统中,各功能液压缸的组成如下:1)手臂回转。单叶片摆动缸(该文用液压马达来模拟其动作过程)。2) 手臂升降。单杆活塞式液压缸。3) 手臂伸缩。单杆活塞式液压缸。4) 手指松夹。无杆的活塞缸(该文用单杆活塞缸来模拟其动作过程)。
设计说明:在该设计中,用液压缸5来模拟手指的松夹动作,用液压马达18来模拟机械手的回转动作。
在整个液压系统的设计过程中,涉及许多液压元件,包括方向控制阀、压力控制阀、流量控制阀、各种传感器以及行程开关等。具体的元件如图1所示。
1.2 机械手液压系统的电磁铁动作顺序表
为了保证机械手能按预设的规定动作过程运行,控制各个液压缸的电磁阀之间要按一定的先后顺序依次动作,分析机械手的动作循环过程可以得到机械手电磁铁动作顺序,见表1。

表1 机械手的电磁铁动作顺序表
1.3 机械手液压系统的工作原理
结合图1和表1对机械手液压系统中手臂的各部分动作过程进行分析。

图1 搬运机械手液压原理图
机械手手臂的上升过程由三位四通电磁换向阀控制,当5YA得电时,三位四通电磁换向阀的右位工作,单杆活塞式液压缸的活塞上升,进而使手臂做上升动作。油路的具体连接如下:1) 进油路。液压源→滤油器→单向阀→电磁换向阀(右位)→调速阀→顺序阀→单杆活塞式液压缸(下腔) 。2)回油路。单杆活塞式液压缸(上腔)→调速阀→电磁换向阀(右位)→油箱。单杆活塞式液压缸的活塞上升速度由单向调速阀调节,运动较平稳。
机械手手臂的伸缩过程由三位四通电磁换向阀控制,当3YA得电时,三位四通电磁换向阀的右位工作,单杆活塞式液压缸向右移动,使手臂前伸。油路的具体连接如下:1) 进油路。 液压源→滤油器→单向阀→电磁换向阀(右位)→单杆活塞式液压缸(左腔)→液压缸向右移。2) 回油路。单杆活塞式液压(右腔)→调速阀→电磁换向阀(右位)→油箱。
同时,1YA得电,二位四通电磁换向阀的右位工作,完成机械手手臂的手指松开的动作,油路的具体连接如下:1)进油路。 液压源→滤油器→单向阀→电磁换向阀(右位)→单杆活塞式液压缸(左腔) →液压缸向下移。2) 回油路。液压缸(下腔)→电磁换向阀(右位)→油箱。
手指的夹紧过程如下:1YA 失电→电磁换向阀(左位)→活塞上移→手指夹紧。
机械手手臂的回转过程由三位四通电磁换向阀控制,当6YA得电时,三位四通电磁换向阀的右位工作,液压马达按逆时针转动,完成手臂回转的动作,油路的具体连接如下:1) 进油路。 液压源→滤油器→单向阀→电磁换向阀(右位)→液压马达(左腔)→手臂回转。2) 回油路。液压马达(右位)→电磁换向阀(右位)→油箱。
机械手手臂的下降过程由三位四通电磁换向阀控制,当4YA得电时,三位四通电磁换向阀的左位工作,同时6YA也处于得电状态,液压缸向下移动,完成手臂下降的动作,油路的具体连接如下:1) 进油路。液压源→滤油器→单向阀→电磁换向阀(左位)→单向调速阀→液压缸(上腔)→手臂下降。2) 回油路。液压缸(下腔)→单向顺序阀→单向调速阀→电磁换向阀(左位)→油箱。
手指松开的过程如下:1YA 失电→电磁换向阀(右位)→活塞下移→手指松开 。同时,6YA 得电→电磁换向阀(右位)→手臂回转。
机械手手臂的伸缩过程由三位四通电磁换向阀控制,当2YA得电时,三位四通电磁换向阀的左位工作,液压缸向左移动,使手臂回缩,油路的具体连接如下:1) 进油路。液压源→滤油器→单向阀→电磁换向阀(左位)→调速阀→液压缸(右腔)→液压缸向左移。2) 回油路。单杆活塞式液压(左腔)→电磁换向阀(左位)→油箱。同时,6YA也处于得电状态,手臂仍处于回转状态。
当6YA失电时,三位四通电磁换向阀的左位工作,液压马达按顺时针转动,从而使手臂做反转动作。
当7YA得电时,液压动力源中的液压泵经先导式溢流阀实现卸荷。
2 机械手液压系统电气回路的设计
根据机械手液压系统的电磁阀动作顺序设计机械手电气控制回路原理图。搬运机械手电气回路图如图2所示。液压机械手电气控制部分主要采用按钮、继电器、行程开关、电磁阀线圈及传感器对机械手动作过程进行控制和调节。

图2 搬运机械手电气回路图
机械手液压系统电气回路的控制原理如下:1) 手臂上升。5YA(+)。按下启动按钮SB,中间继电器KA得电,其常开触点闭合,在初始位置的SQ行程开关被压下去,电磁铁5YA得电,使手臂做上升动作。2) 手臂前伸。1YA(+)、3YA(+)。当手臂上升到一定位置时,会触碰行程开关SQ,使电磁铁1YA和3YA得电。同时,中间继电器KA得电,其常闭触点断开,使电磁铁5YA失电,从而完成手臂前伸和手指松开的动作。3)手指夹紧。1YA(-)。当手臂前伸到一定位置时,触碰行程开关SQ,使中间继电器KA和KA得电。KA、KA常闭触点断开,分别使电磁铁1YA、3YA失电,使手指夹紧。 4)手臂回转。6YA(+)。当KA常开触点闭合、传感器B感应到手指夹紧时,继电器KA得电,其常开触点闭合,电磁铁6YA和继电器KA得电,使手臂做回转动作。5)手臂下降。4YA(+)、6YA(+)。当KA常开触点闭合时,使电磁铁4YA得电,使手臂做下降动作。6)手指松开。1YA(+)、6YA(+)。当手臂下降到一定位置时,会触碰行程开关SQ,使中间继电器KA得电,其常闭触点断开,使电磁铁4YA和中间继电器KA3失电,KA触点复位,其常开触点闭合,使电磁铁1YA再次得电,从而完成手指松开的动作。7)手臂缩回。2YA(+)、6YA(+)。当KA常开触点闭合、传感器B1感应到手指松开时,中间继电器KA得电,其常开触点闭合,使电磁铁2YA和中间继电器KA得电。KA常闭触点断开,使电磁铁1YA失电,从而完成手臂缩回的动作。8)手臂反转。6YA(-)。当手臂缩回到一定位置时,触碰行程开关SQ,KA常开触点闭合,使中间继电器KA得电,其常闭触点断开,电磁铁6YA失电,使做手臂反转动作。9)原位停止。7YA(+)。按下按钮SB,中间继电器KA得电,其常开触点闭合,回路自锁,另一触点使电磁铁7YA得电,使机械手原位停止。10)停止。按下停止按钮SB,中间继电器KA失电,其触点复位,整个电气控制回路失电,机械手动作完一次工作后停止。
3 搬运机械手液压系统的仿真
根据动作要求在仿真软件上绘制搬运机械手液压回路图和电气控制图,并用FluidSIM-H液压仿真软件对其进行仿真。仿真结果显示,该文所设计的机械手液压系统能满足机械手的手臂动作要求,并按其动作顺序进行连续动作。该文仅以机械手手臂的回转动作为例来验证其仿真过程,机械手手臂回转过程的仿真如图3所示。当按下SB时,继电器KA得电,其常开触点闭合,同时触碰到SQ行程开关,电磁阀线圈5YA得电,电磁换向阀的右位工作,液压缸活塞前伸,手臂上升。当手臂上升到一定位置时,压下行程开关SQ,使电磁阀线圈1YA和3YA得电,电磁阀4和电磁阀9的右位工作,液压缸5活塞下降,手指松开;液压缸11活塞前伸,手臂前伸。同时,中间继电器KA得电,其常闭触点断开,使电磁铁5YA断开,电磁阀16为常态位工作。当手臂前伸到一定位置,触碰到行程开关SQ,使继电器KA和KA得电。KA、KA常闭触点断开,分别使电磁阀线圈1YA、3YA失电,电磁阀4和电磁阀9为常态位工作,液压缸5活塞上升,手指夹紧。当KA常开触点闭合、传感器B感应到手指夹紧时,中间继电器KA得电,其常开触点闭合,使电磁阀线圈6YA得电,电磁阀17的右位工作。当液压缸伸出时,就可以实现手臂回转的动作。

图3 手臂回转的仿真图
4 搬运机械手液压系统运行调试及结果分析
首先,在FESTO液压试验台上根据仿真后的液压系统图或元件明细表选取并安装固定元件。其次,根据机械手液压系统图安装各元器件并紧固,连接时按进油路和回油路进行连接,连接时要仔细,不能出现漏接或错接现象。最后,根据机械手液压系统的电气控制线路图完成电路连接工作,最终完成机械手液压系统回路的组装过程,如图4所示。连接无误后再对系统进行调试并运行。试验结果显示,该文设计的机械手液压系统能在Festo液压实训装置上模拟其动作过程,基本达到设计的目的及要求。最终,机械手可以实现手臂上升、手臂前伸、手指夹紧(抓料)、手臂回转、手臂下降、手臂松开(卸料)、手臂缩回、手臂反转(复位)以及原位停止(卸荷)多个动作过程(并能循环工作)。
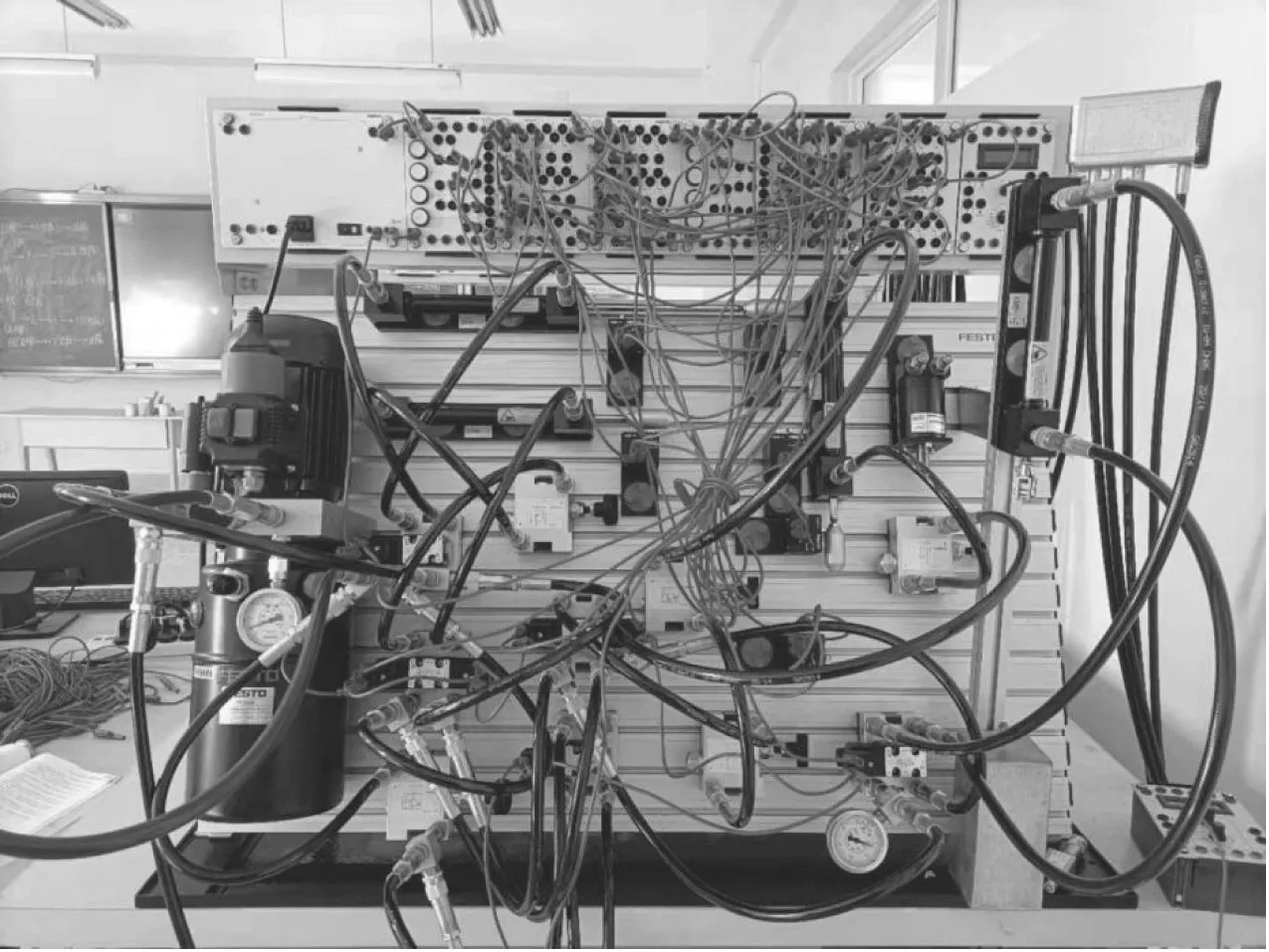
图4 搬运机械手液压系统回路的组装与调试
5 机械手液压系统特点分析
机械手液压系统特点如下:1) 机械手液压系统的控制采用电磁阀换向,并与电气控制相结合,具有操作方便、灵活以及自动化程度高等特点。2) 采用双作用的单杆活塞式液压缸驱动手臂伸缩和升降,手臂升降和伸缩的速度分别由单向调速阀10、单向调速阀12以及单向调速阀13控制,并采用回油路节流调速方式,其运动平稳性好。手臂的回转和反转过程由单叶片摆动液压缸驱动。3) 采用立式液压缸来控制手臂的升降,为支承运动部件的自重,回路中采用单向顺序阀14的平衡回路,可以有效防止手臂自行下滑或超速。 4) 为了使手指夹紧缸在夹紧工件后不受系统压力波动的影响,并保证能夹紧工件,回路中采用失电夹紧对其进行控制,更加安全、可靠。5) 与其他驱动方式相比,液压机械手的控制具有传递动力大、传动平稳性高等优点。
6 结论
在工业生产中,液压搬运机械手被广泛地应用于各个行业。该文对搬运机械手液压系统进行设计,首先,分析液压机械手要达到的目的,并对手指夹紧、手臂伸缩、手臂升降以及手臂回转等动作过程进行分析。其次,对搬运机械手的液压系统图和电气控制回路图进行设计,并用液压仿真软件Fluid SIM-H对其进行仿真分析。最后,在FESTO实验平台上对其进行模拟运行调试,调试结果表明,该机械手液压系统能实现手臂上升、手臂前伸、手指夹紧(抓料)、手臂回转、手臂下降、手臂松开(卸料)、手臂缩回、手臂反转(复位)以及原位停止(卸荷)多个动作过程。
猜你喜欢
水电站机电技术(2024年2期)2024-02-28 06:55:08
内燃机与配件(2022年1期)2022-01-06 12:21:13
中国科技纵横(2021年7期)2021-07-22 02:55:46
实用心电学杂志(2018年5期)2018-10-24 06:49:18
中国介入影像与治疗学(2017年1期)2017-02-21 09:07:10
电子制作(2016年19期)2016-08-24 07:49:48
机床与液压(2014年14期)2014-06-06 06:01:44
筑路机械与施工机械化(2014年2期)2014-03-01 02:57:59
河南科技(2014年16期)2014-02-27 14:13:21
河南科技(2014年15期)2014-02-27 14:12:37