机载激光雷达在河流调查中的应用研究
2022-05-05 05:42李红林
经纬天地 2022年1期
李红林
(山西省测绘地理信息院,山西 太原 030001)
0.引言
近些年,测绘遥感技术软硬件发展迅速,新技术的出现提升了测绘遥感的生产力。机载激光雷达(LiDAR)技术的出现,为新型基础测绘的数据采集带来了新的方向。LiDAR技术是集激光扫描仪(1aser scanning)、全球定位系统(Global Position System,GPS)、惯性导航系统(Inertial MeasurementUnit,IMU)于一体的主动式航空遥感技术,通过对地面进行三维扫描获得空间信息点云数据[1]。激光雷达(LiDAR)已成为一种新型空间数据获取手段,利用激光测距技术、高精度动态载体姿态测量技术和高精度动态GPS差分定位技术获取各激光脚点的空间三维坐标及反射强度等信息。其数据采集对天气、季节以及时段要求较低,可快速获取地表空间信息。数字高程模型作为基础测绘数据,在地学分析等方面扮演着重要的角色,机载LiDAR已成为快速获得大范围高精度DEM的重要手段[2]。
LiDAR技术在各个方面迅速发展,相对于其他遥感技术,它是遥感技术领域的一场革命。目前激光雷达数据主要应用于基础测绘、城市三维建模等方面。其具有数据处理智能化程度高,数据生产周期短、不接触性、高密度、高精度(尤其是高程精度)、作业成本低等优势[3]。它采用主动性工作方式,通过自身发射的激光脉冲反射来获取目标信息,不受天气条件限制,能全天候实施对地观测。机载激光雷达传感器发射的激光脉冲对植被也具有一定的穿透能力,这是传统航空摄影测量技术所无法比拟的[4]。
本文主要是在山西省主要河流土地资源调查项目建设中,利用机载激光雷达技术在某市域河流调查中获取数据,对获取的LiDAR数据进行解算,解算完成后对点云数据进行分类滤波、坐标转换、点云分块等处理,最终生成DEM、DSM成果。
1.河流调查技术流程
山西省某市域河流土地资源调查的激光雷达数据处理任务的主要技术路线为:
根据获取的河流治导线外扩500米范围激光雷达原始数据,首先进行数据预处理,包括轨迹文件的解算、原始激光扫描数据的释放等;其次对激光雷达点云数据进行去噪分类处理、坐标转换、高程精化;最后将点云按照标准分幅进行分块处理,进行数字地表模型和数字高程模型的生产。经质检合格后,制作数字地表模型和数字高程模型的元数据,最后提交所有成果数据。生产流程(如图1所示):
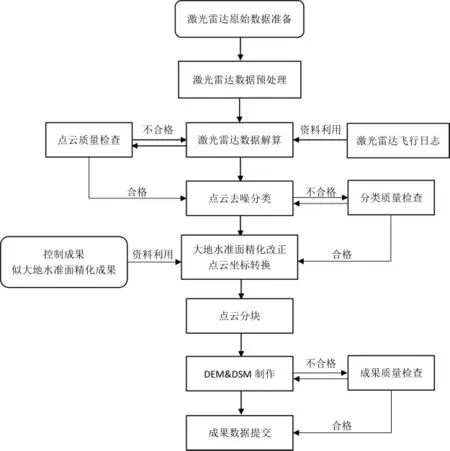
图1 生产总流程
2.激光雷达数据处理
2.1 激光雷达数据获取
激光雷达扫描数据获取采用AEROS-912动力三角翼飞行器,RIEGL VQ580i机载激光雷达系统集成Trimble AP60惯导系统。
Riegl-VQ580i机载激光雷达扫描系统初始采集到的原始数据包括:原始激光点云数据(由激光雷达扫描仪采集得到)、机载INS-GPS导航数据(由惯导系统采集得到)。
2.2 激光雷达数据预处理
本次使用POSPac软件对集成全球卫星系统(GNSS)与惯性导航技术的定位定姿系统所采集的数据进行处理,通过计算获取高精度的定位定姿数据。
轨迹解算完成后,使用RIEGL的系列软件释放点云数据。
2.3 点云解算
因本次生产项目使用的是RIEGL激光雷达仪器产品进行数据获取,已有的激光雷达原始数据包含了INS-GPS高精度轨迹文件,故数据预处理仅需将原始的激光数据进行解析,获得通用格式(*.las)的点云数据。项目原始数据以RiProcess工程进行组织(*.rpp),需使用RiProcess软件解算点云。
点云解算涉及工程配置、轨迹截取、点云数据释放、点云数据航带调整、重新解算、点云导出等流程,详细解算流程如下:
2.3.1 配置工程
在RiProcess软件中打开*.rpp格式的工程文件,设置工程坐标系为WGS84/UTM_North zone 43。将sbet_Mission.out轨迹文件导入软件中,并转换格式为*.pof,转换时需选择轨迹数据对应的日期和时区。然后在软件中根据轨迹的最大、最小经纬度计算感兴趣的区域范围。
2.3.2 轨迹截取
处理机载数据时,一般会选择测量范围内的长直航线进行解算。在RiProcess软件中选择轨迹后,会按照原始的RXP根据选择的轨迹进行截取,去除冗余数据,保留有效数据区。每一条轨迹均会生成一个RXP文件,后续将使用这些文件进行解算和航带平差。如不进行轨迹截取操作,将无法进行激光数据调整。
2.3.3 点云数据释放
在数据解算前,需先设置点云的提取参数,包括滤波设置和MTA方法设置等。其中,MTA方法选择Auto可有效减少因MTA效应造成的噪点。针对本次项目数据出现的航高超过设备建议的最大值导致地面点云缺失、空中噪点严重的情况,可尝试使用Fixed in zone方法,并选择对应的Zone(通过计算得到)。然而,该方法仅能解算出某个固定的Zone内的数据,对于跨区间的数据不能用该方法解算出全部的数据,但可作为补充。
点云解算需给定设备的初始解算参数及激光相对于惯导数据的偏移量和旋转角。通过激光数据解析、激光和轨迹的融合处理,最后生成可视化的点云数据。
2.3.4 点云数据航带调整
点云解算完成后,航带与航带的重复扫描数据之间存在分层,从几厘米到几十厘米不等,需通过创建航带间的公共平面、调整每条航带的姿态角和调整偏移量来实现对激光数据的调整。
2.3.5 点云重新解算和输出
激光数据调整后,需重新和轨迹数据进行融合,解算点云。解算完成后将成果导出为LAS(V1.2)格式。
2.4 点云去噪分类
因项目点云数据存在大量的空中或低于地面的噪点,且无法通过软件算法一键过滤,所以点云后处理的第一步是将噪点手动滤除。点云存在的噪点(如图2所示):
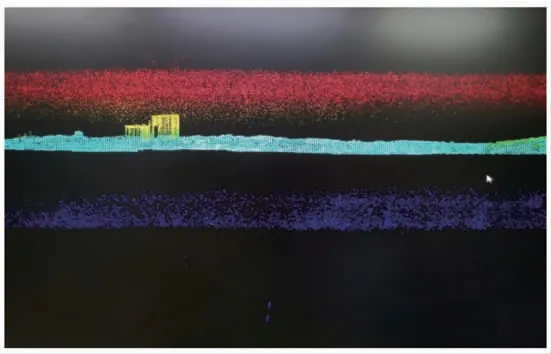
图2 点云噪点
点云分类主要目的是将点云中的构筑物、植被等地物滤除,仅保留地面位置的点云,反映实际地形的起伏情况,以供生成数字高程模型(DEM)。分类使用已有的Macro宏命令在Terrasolid中运行,软件自动进行去噪、地面点分类等步骤。点云宏命令运行(如图3所示):
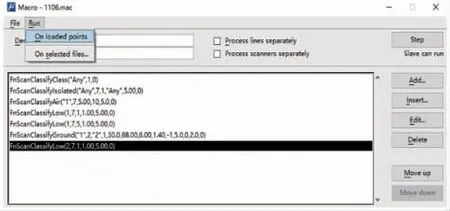
图3 点云分类宏命令
自动分类完成后,需检查地面点的情况。此时需要根据地面点类别生成可编辑的模型,查看模型中不合理的凹凸,并通过截取剖面查看点云是否存在地面以下的低点或者空中的噪点,若有,通过手动分类的方式将其分类到其他类别。另外,查看模型中是否有未过滤的建筑、植被、架空桥梁等,若有,也需通过手动分类的方式将其分类到其他类别。检查无问题后,保存当前点云,并将地面点类别单独导出保存。模型检查分类结果(如图4所示):
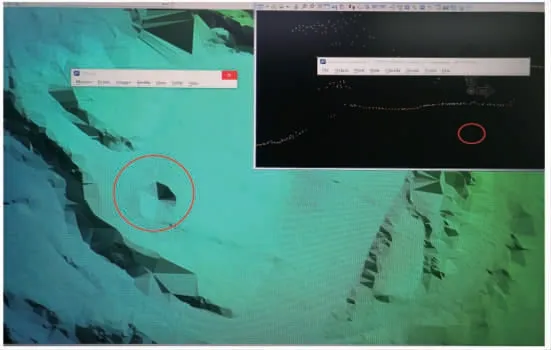
图4 通过可编辑TIN模型检查分类结果
2.5 点云坐标转换
根据项目成果坐标系要求,点云的数学基础应为:平面坐标系统采用国家大地坐标系CGCS2000;高程系统采用1985国家高程基准;成图比例尺为1∶2000。
故需将WGS84/UTM_North zone 43坐标系下的点云重新投影,采用高斯-克吕格投影,3°分带,中央经线为114°。并通过七参数进行点云平面坐标转换,把点云数据转换到项目要求的CGCS2000国家大地坐标系。高程转换利用山西省大地水准面精化模型,将点云数据的大地高转换到1985国家高程基准。
2.6 点云分块
在CoProcess软件中,采用1∶2000比例尺的标准分幅(50cm×50cm)对点云进行分块处理。点云分块后再进行DEM或者DSM的生产,将大大减少软件同时处理的数据量,在海量点云数据的处理中是必不可少的。点云分块转换(如图5所示):
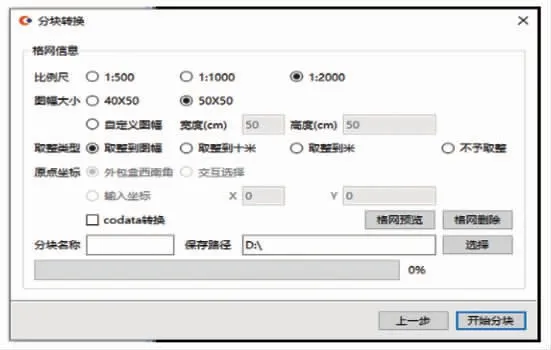
图5 CoProcess分块转换
2.7 成果输出
点云分块后,使用分块点云数据生产数字高程模型DEM和数字表面模型DSM。根据项目成果要求,设置格网间距为0.5米,边界外扩50米。为达到外扩50米要求,软件会自动调用相邻点云数据参与模型生成。模型生成后,检查模型是否存在空洞和因噪点导致的不合理凹凸、DEM是否存在未滤除的建筑等,若存在此类问题应使用CoProcess软件进行高程修补、删除、平滑、置平等编辑处理。DEM生成(如图6所示):
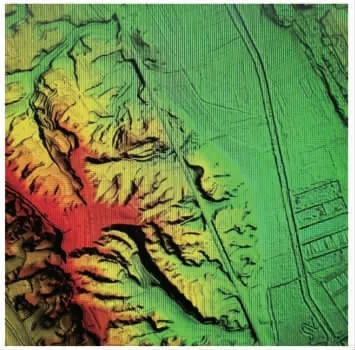
图6 生成DEM
3.质量控制
3.1 总体要求
首先,加强数据生产过程中的质量监督和控制,实行生产人员自查、质检人员抽查的总体原则,技术管理人员加强数据生产过程中的技术指导和疑难解答,使生产人员对有关技术标准的认知清晰准确,提高效率,确保质量。
其次,加强成果质量控制,在生产人员自查的基础上,质检人员进行二次检查,对于检查不合格的成果退回生产环节重新处理,直至所有成果检查合格,保证提交的成果无质量问题。
3.2 检查内容
3.2.1 点云质量及覆盖度检查
结合本次河流治导线及外扩范围,检查解算后点云的覆盖情况,如,是否存在局部漏洞、是否未涉及外扩范围边界等,确保点云的完整性。初步查看点云的密度、坐标基准和噪点情况,对于点云中出现的大量噪点情况,尝试修改RiProcess中解算的相关参数来对点云进行改进。
3.2.2 点云分类成果检查
通过目视检查的方式,将点云数据通过类别或者高程渲染查看;重点检查地面点类别分类是否正确,最有效的方法是将地面点类别生成可编辑模型,查看模型高程不连续处、凹凸不平处,借助绘制剖面图进行分析判断。当检查出分类错误的点时,使用手动分类的工具改变错误点的类别。
3.2.3 DEM、DSM模型检查
查看DEM、DSM模型的空间参考信息、格网大小、分幅和模型外扩等是否符合项目要求;查看DEM、DSM模型是否存在不合理空洞和凹凸;查看DEM、DSM模型不同图幅接边处数据是否连续。
检查DEM、DSM模型的高程精度,需在软件中同时导入河流实测的高程检查点坐标和DEM、DSM模型做对比,软件自动提取同名点高程信息,并输出对比报告,可精确反映DEM、DSM模型的高程精度。
4.结束语
机载激光雷达新技术在本次生产中的应用具有一定的优势与发展前景,验证了机载激光雷达新技术在实际生产中的应用优势,对今后的日常生产工作起到指导作用。其优势表现为:(1)获取空间信息的速度快、效率高,作业安全;(2)获取的数据精度较高;(3)机载激光雷达技术提供的信息较为丰富。
新技术的使用,让我们感受到了作业的高效便捷,但是机载激光雷达技术也表现出一些不足的地方:机载激光雷达技术采集的部分数据真实性存疑,需要人工辨别;机载激光雷达技术比较复杂,专业性强,数据处理需要系统化的提高;机载激光雷达数据解算有限制,硬件产品依赖国外进口。
即使这样,机载激光雷达新技术应用前景在各行各业依然看好。特别是在测绘行业,机载激光雷达与其他设备的配合采集,大大提高了一次性获取多源数据的能力,省时省力,数据精度符合生产需要,能满足大比例尺地图测绘、工程测量、变形监测等不同测绘行业的各种需求。随着智能化的发展,机载激光雷达新技术在国民生产中一定会发挥更大的作用。
猜你喜欢
北京测绘(2022年5期)2022-11-22
北京航空航天大学学报(2022年8期)2022-08-31
房地产导刊(2022年4期)2022-04-19
汽车观察(2021年8期)2021-09-01
曲阜师范大学学报(自然科学版)(2021年3期)2021-08-26
摄影之友(影像视觉)(2020年4期)2021-01-09
影像视觉(2020年4期)2020-05-09
中国交通信息化(2019年1期)2019-03-26
电子制作(2018年16期)2018-09-26
中山大学学报(自然科学版)(中英文)(2018年4期)2018-08-08