
智能化三点支撑液压调平控制系统设计
2022-04-27 12:24:10谢敬心徐世许
自动化与仪表 2022年4期
谢敬心,徐世许,肖 克
(青岛大学 自动化学院,青岛 266071)
车载蜂箱搬运装置使用一般的卡车底盘,搬运蜂箱的吊臂固定在油缸支撑的车载平台上。在使用时轮胎着地,由于使用场地不能保证车体处于水平状态,同时轮胎的弹性作用也会影响车体水平精度,从而平台不能处于水平状态,水平误差会使2 m长的吊臂产生较大幅度的倾斜,不能保证抓取的蜂箱能够平稳的移动,所以,要设计车载平台的调平系统来使平台能够保持水平状态。调平系统的形式是多样的:按支撑结构方式分为三点支撑调平、四点支撑调平和六点支撑调平[1]。该系统是三点支撑调平系统,使用OMRON CP2E PLC 控制器接收双轴水平传感器的角度信息,通过控制比例换向阀的开度,来调节流入调平支撑腿上的油量及方向,从而调节支撑腿的伸缩,实现快速调平[2];控制系统保持最高点静止,调整其余支撑腿位置,用压力变送器检验支撑腿着地状态,可以迅速准确完成调平并有效地消除“虚腿”。
1 调平系统总体设计
调平平台使用三点支撑方法,由3 个支撑腿提供支撑,支撑腿接比例换向阀,图1为实物图。由于调平系统需要实时检测角度并且保持高度可靠性,因此采用PLC 作为控制器,既可以保证系统的可靠性、实时性、经济性也可以进行灵活配置。调平系统的构成如图1所示。

图1 车载液压调平装置实物图Fig.1 Physical drawing of on-board hydraulic leveling device
调平系统由支撑腿、倾角传感器、CP2E PLC 控制器、比例换向阀、液压油缸、电位器、操纵杆和数码管等组成。各部分作用如下:
(1)支撑腿:调平系统的运行单元。
(2)CP2E PLC 控制器:决策调平系统的动作。
(3)倾角传感器:用于测量倾角。
(4)数码管:显示平台的倾角。
(5)操纵杆:用于手动调平时控制支撑腿的位置。
(6)比例换向阀:接收PLC 电压信号,控制油缸给油量。
2 调平系统控制策略
2.1 调平系统的建模与分析
调平系统以平台倾角为判定依据,进行平台调平[3]。确定平台最高点后,令其余支撑点移动到和最高点水平的位置完成调平。平台经过预支撑后坐标关系如图2所示。
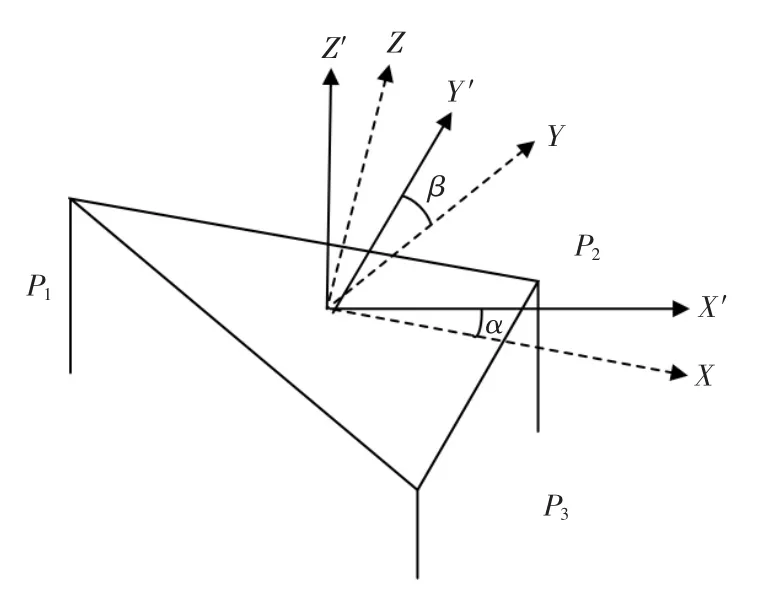
图2 平台坐标关系图Fig.2 Platform coordinate diagram
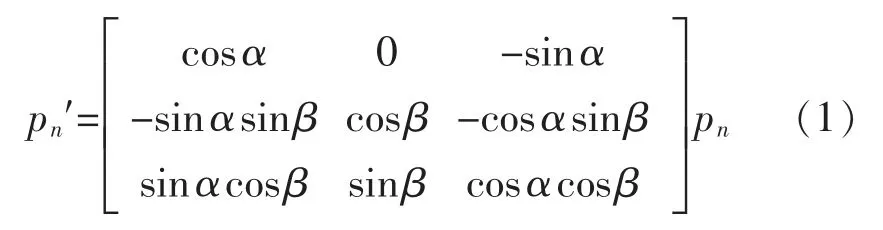
设OX′Y′Z′为水平面坐标系,OXYZ 为倾斜平台坐标系,(α,β) 分别为水平面与平台在X 轴和Y轴方向上的夹角,设支撑点在水平面坐标系中的坐标为Pn′=(Xn′,Yn′,Zn′),在倾斜平台坐标系中坐标为Pn=(Xn,Yn,Zn),其中n=(1~3),根据图2可得Pn与Pn′的关系为
设平台的初始倾角为α0和β0,则由式(1)可得:

当倾角很小时,可以将式(2)化简为

车载平台为等边三角形,其底边P2P3长a=365 mm,高为b=316 mm。以P2支撑点为最高点为例,其余支撑点与最高点的距离差为

从而得出其余支撑点所需调节距离为

由此可得出支撑点调节距离与倾角之间的关系。
2.2 PID 控制系统设计
为保证调平系统的实用性与广泛性,采用经典PID 控制算法进行控制系统设计[4],其控制规律为

式中:u(t)为支撑腿的位移量;e(t)为支撑点与最高点的位移差。其控制原理如图3所示。
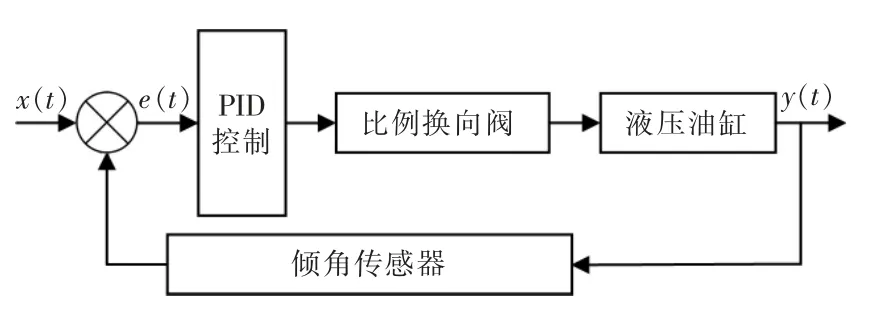
图3 调平系统PID 控制原理图Fig.3 PID control schematic diagram of leveling system
3 调平系统硬件设计
由于调平系统完成调平所需要的时间和调平精度与倾角传感器的布置方式密切相关,因此需要将倾角传感器安装在平台的中间,从而方便倾角传感器测量平台X、Y 轴与水平面的夹角并将夹角传输到控制器,然后完成对平台状态的闭环控制。操作面板上的各模式开关分别接在PLC 不同的数字量输入,可根据实际情况来选择不同的模式。为了操作人员实时观察X、Y 轴与水平面的倾角,因此将数码管接入PLC 的485 接口用来显示倾角。自动模式下,控制器采用PID 控制方法,依据平台的水平状态以及支撑腿的行动状态信息决定下一步的动作和开度,并让比例换向阀操纵支撑腿伸缩,最终完成平台调平。硬件结构如图4所示。

图4 控制系统硬件结构图Fig.4 Hardware structure of control system
在调平系统中采用OMRON 的CP2E PLC 为控制器,OMRON 的CP2E 系列PLC 具有处理速度高、能接收脉冲、原点搜索、模拟量输入输出等功能。该型号PLC 主要包含一个中央处理器单元、数字量输入输出模块、模拟量输入模块,满足本系统的应用需要。本设计采用LVT426T 型号的倾角传感器,可以实时地输出X 轴和Y 轴的倾角。其实物图如图5所示。

图5 倾角传感器实物图Fig.5 Physical drawing of inclination sensor
为更好地减小圆盘的水平误差,必须精确地控制支撑腿上下移动的位移量,因此在设计中选用4WREE6E08-20B/G24K31/A1 比例换向阀来控制油缸的流量从而控制支撑腿的位移量。
在调平系统中用控制器的模拟量输出模块来控制比例换向阀,用控制器的D/A 模块连接比例换向阀的放大板,把数字量转成模拟量进行控制,输入电压为-10~10 V,反馈信号输入到控制器,经过和输入值的比较,再输出到放大器上。
4 调平系统的通信设计
为保证调平系统的抗干扰性和稳定性,调平系统通过CP2E 的Modbus-RTU 简易主站功能发送Modbus-RTU 命令控制支持Modbus-RTU 协议的倾角传感器和数码管实现串行通信。Modbus-RTU 协议为主从站通信协议,采用请求-应答的通信方式,主站发送带有从站地址和功能码的请求帧,该地址的从站接收后发送响应帧进行应答,且两条数据帧的时间间隔应不小于3.5 个字符[5]。为了保证留有足够多的时间余量,本系统将该时间间隔定为10 ms。
4.1 数据帧通信格式
Modbus-RTU 简易主站的数据帧格式与标准Modbus 协议数据帧格式有所不同,Modbus-RTU 简易主站数据帧格式如表1所示。

表1 数据帧格式Tab.1 Data frame format
在通信传输中,地址码作用为识别拥有该地址码的从站,取值范围为01H~F7H。功能码为主站向从站下达的指令,根据实际情况,调平系统进行Modbus-RTU 通信主要使用到的Modbus 功能码为03H(读取X 轴与Y 轴角度)和06H(数码管显示十进制读数)。标准Modbus 数据帧应包含CRC 校验码,用于检验请求帧与应答帧是否出错,但在Modbus-RTU 简易主站功能中可自动进行CRC 校验,无需人工设置校验码。
4.2 通信程序设计
在PLC 中编写Modbus-RTU 主站程序,设置串行通信模式为Modbus-RTU 简易主站模式,控制通信参数设置为波特率:9600;数据位:8 位;停止位:1 位;无奇偶校验,与倾角传感器和数码管建立连接。由于存在多个从站,所以需要进行从站地址分配,设定倾角传感器地址为03H、X 轴数码管地址为01H、Y 轴数码管地址为02H。将需要发送的数据按规定的数据帧格式写入指令DM 数据区中,并将Modbus-RTU 主站执行位(A640.00)置ON,即可发送请求帧,从站接收到Modbus-RTU 主站发送的请求后发送响应数据帧,传递的响应数据帧储存到响应DM 数据区中。CP2E 指令与相应DM 数据区如表2所示,部分通信程序的梯形图如图6所示。
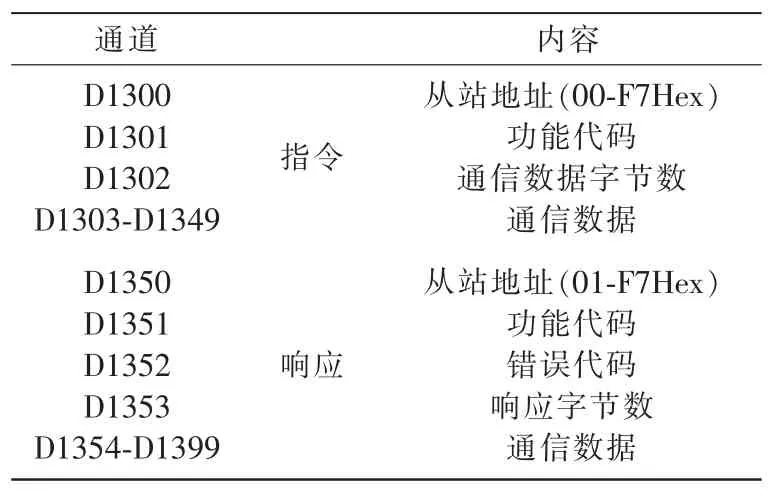
表2 DM 数据区分配字Tab.2 DM data area allocation word
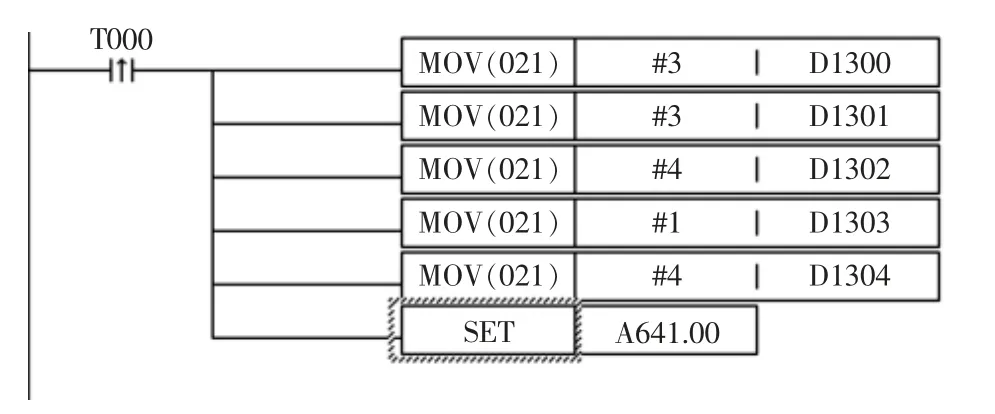
图6 倾角传感器通信程序Fig.6 Inclination sensor communication procedure
构建轮询程序,调用TIM(定时器)与CNT(计数器)指令,令指令的输出T000、W0.02、W0.03 作为启动Modbus-RTU 通信的触发条件。使两条数据帧的时间间隔达到10 ms,并保证先完成与倾角传感器通信后再进行与数码管通信。部分通信程序如图7所示。

图7 轮询程序Fig.7 Polling procedure
5 调平系统的控制程序设计
根据控制流程设计调平控制程序,控制流程如图8所示,设计的程序分为原点支撑、手动、自动和结束四部分。原点支撑程序负责平台的预支撑与收起。手动程序负责根据操作人员操作操纵杆的方式来控制PLC 输出的电压信号,从而达到控制油缸流量的目的。
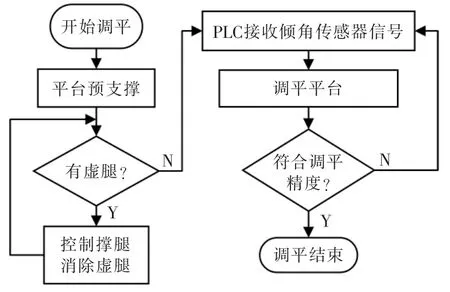
图8 自动调平流程Fig.8 Flow chart of automatic leveling
自动程序采用自整定PID 控制进行调平,在CX-P 中编写自整定PID 控制程序,调用PIDAT 指令块作为控制程序的主要部分,该指令可以从输入字中得到输入PV,根据控制字中设置的参数进行自整定PID 计算,得到的结果以变量的形式存入输出字中。倾角角度模拟量输入先进行10 倍的扩大再经FLX 指令转为十六进制数据,根据α 与β 的正负确定出最高点,并计算出各支撑点与最高点的位移差,将该数据作为PIDAT 的输入PV。控制字共有10 个字节需用户自行设置,包括设定值SV、PID 参数、SV、PV 的上下限等。得到模拟量输出转化为电压信号来控制比例换向阀的开度。部分PID 控制程序如图9所示。

图9 PID 自整定控制程序Fig.9 PID self-tuning control program
6 结语
针对车载蜂箱搬运装置平台不能保持水平的问题,设计了基于PLC 的三点支撑调平系统,采用了液压油缸与比例换向阀组合方式调节平台位置,精确度高,调平速度快。采用Modbus-RTU 通信协议,实现了PLC 与倾角传感器和数码管的实时通信,避免了因延时而带来的误差。并采用PID 控制方法,减少了设备的晃动对倾角传感器测量的影响,提高了调平精度,使调平误差趋于0.5°以内;同时为了设备使用的便捷性设置了原点支撑模式,贴合实际,方便设备运输使用。调平系统具有较高的自动化水平,调平方式精准有效,针对性强,具有良好的市场前景。
猜你喜欢
大学数学(2022年6期)2023-01-14 07:16:34
中国民间疗法(2021年5期)2021-06-09 09:21:08
机械工程与自动化(2020年4期)2020-08-25 02:06:58
电脑报(2019年2期)2019-09-10 07:22:44
科技风(2019年13期)2019-06-11 13:38:30
时代农机(2019年2期)2019-04-24 01:20:14
电脑与电信(2018年10期)2018-12-29 11:14:50
森林工程(2018年4期)2018-08-04 03:23:38
中国公路(2017年15期)2017-10-16 01:31:53
百姓生活(2017年6期)2017-06-10 16:05:27
