
基于RFID技术的可编程指令卡小车设计与实现
2022-04-27 12:24:26李睿勋陈泽昕康晓杰
自动化与仪表 2022年4期
徐 微,李睿勋,陈泽昕,康晓杰
(西安交通大学城市学院 电气与信息工程系,西安 710018)
随着数字化时代的发展,人们越来越重视基于人工智能的编程教育的发展[1-2]。对于低年龄段儿童,编程智能车是编程教育中的重点内容[3],利用编程智能车进行路径规划是编程智能车课程体系中的重要组成部分,可以培养学生的动手能力和逻辑思维能力[4]。目前市面上的编程教学智能车主要采用颜色传感器识别不同颜色的纸质指令贴进行路径规划[5-8],颜色传感器受环境影响较大,识别精度较低,并且颜色纸质指令贴容易撕毁难以重复使用,导致维护成本增加及资源浪费,因此有必要开发一种精度高可重复使用的可编程拼装智能车。
针对传统编程智能小车弊端,本文开发了一种采用射频识别技术的指令卡识别智能车,其利用卡号进行识别实现路径规划,具有识别速度快、精度高、可重复使用、受环境影响较小等优点[9-11]。目前在编程领域市面上没有采用相关技术开发的智能车。
1 系统整体框架
基于射频识别技术的可拼装编程智能车,除了要实现对黑色路径的跟随行驶还要对路径节点上的指令卡进行识别以执行相应的转向动作,并且可以自动对行驶路线进行修正,防止转弯时跑偏。因此本系统采用STEM32 单片机作为主控芯片,利用L298N 驱动模块,控制电机正反转,实现小车的前进后退及转向功能;利用红外循迹模块实现对路径的识别跟随;利用射频识别模块实现对小车运行方向控制及路径规划。将红外传感器及射频识别模块采集到的参数反馈给控制器进行调节,实现对行进路线的修正。系统整体框架如图1所示。
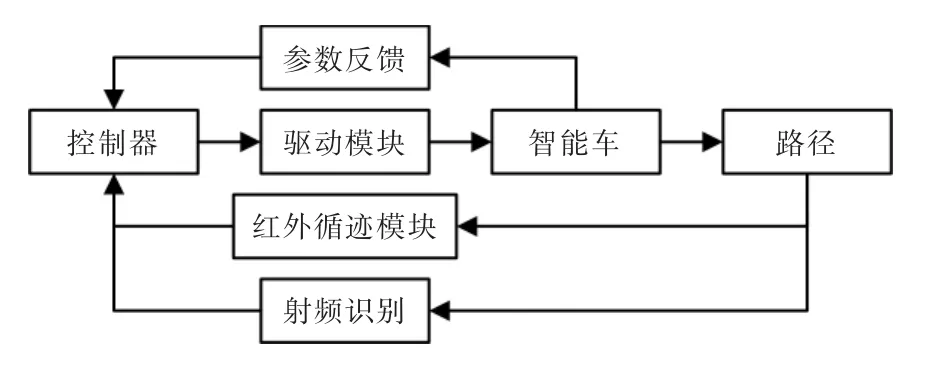
图1 系统结构图Fig.1 Structure diagram of control system
2 系统硬件设计
为了实现系统功能,硬件结构如图2所示。包含控制器、WiFi 模块、按键模块、霍尔测速模块、电机驱动模块、射频识别模块、红外循迹模块等,各模块采用常见电路结构[12-14],共同协调实现对路径识别及规划的需求。

图2 系统硬件设计原理框图Fig.2 Schematic block diagram of system hardware design
2.1 射频识别模块
RFID 射频识别技术可以快速地进行数据交换,通过放置阅读器进行检测,在标签进入阅读器后,接收阅读器发出的射频信号,凭借感应电流所获得的能量发送出存储在芯片中的信息[15],其原理图如图3所示。本设计采用MFRC522 射频识别模块,利用射频卡卡号作为指令入口,将不同编号的指令卡放置于九宫格路径节点,当阅读器读取到指定卡号时小车执行对应指令对小车行进方向进行控制,可实现对路径的规划。
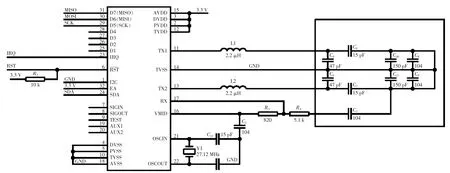
图3 射频识别模块原理图Fig.3 Schematic diagram of RFID module
2.2 红外循迹模块
路径识别跟随采用红外循迹模块,在小车底部安装多个循迹模块进行检测,通过红外传感器反馈的信号判断小车的行驶状态,其原理图如图4所示。采用带隔板的红外发射管和接收管垂直安装在小车底部,当未检测到黑线时接收管可以接收到发射管发射的信号,传感器输出高电平,当检测到黑线时接收管收到微弱的信号,传感器输出低电平,从而实现对黑色路径的识别与跟随[16]。
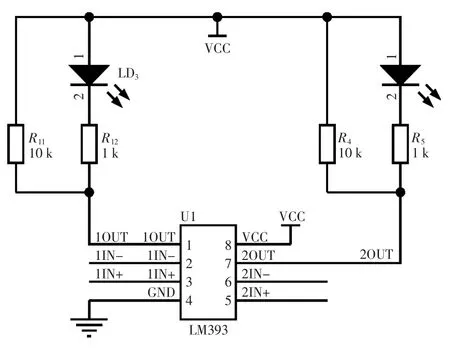
图4 红外循迹模块原理图Fig.4 Schematic diagram of infrared tracking module
3 系统软件设计
编程小车软件程序部分由小车行驶控制程序、红外循迹程序、指令卡识别程序、及WiFi 控制程序等组成,程序关键部分如图5所示。系统启动后设备初始化,开始检测指令卡,当检测到启动指令卡后小车前进,启动后未检测到指令卡时小车保持直行,红外循迹模块采集路径信息反馈到单片机进行处理,以保证小车不会偏离路径,当再次检测到指令卡时小车执行相应的方向控制指令,执行完毕后重新检测路径直线行驶,直到检测到停止指令卡时小车停止。通过此控制程序可以实现对小车行驶路径的识别与规划。针对这一特点可以面向低龄段儿童开发编程启蒙课程,根据课程任务要求将不同功能指令卡摆放在九宫格路径节点上,完成任务目标。以路径规划训练逻辑思维,通过指令卡可以很方便地对小车进行自动控制,降低学习成本,提升学习兴趣。

图5 射频识别及红外循迹程序流程图Fig.5 RFID and infrared tracking program flow chart
4 系统调试结果
4.1 硬件调试结果
在车架上安装电源模块、WiFi 模块、按键模块,在车身正面安装控制器,背部安装射频识别模块及红外循迹模块等,并进行功能测试,搭建实物如图6所示。
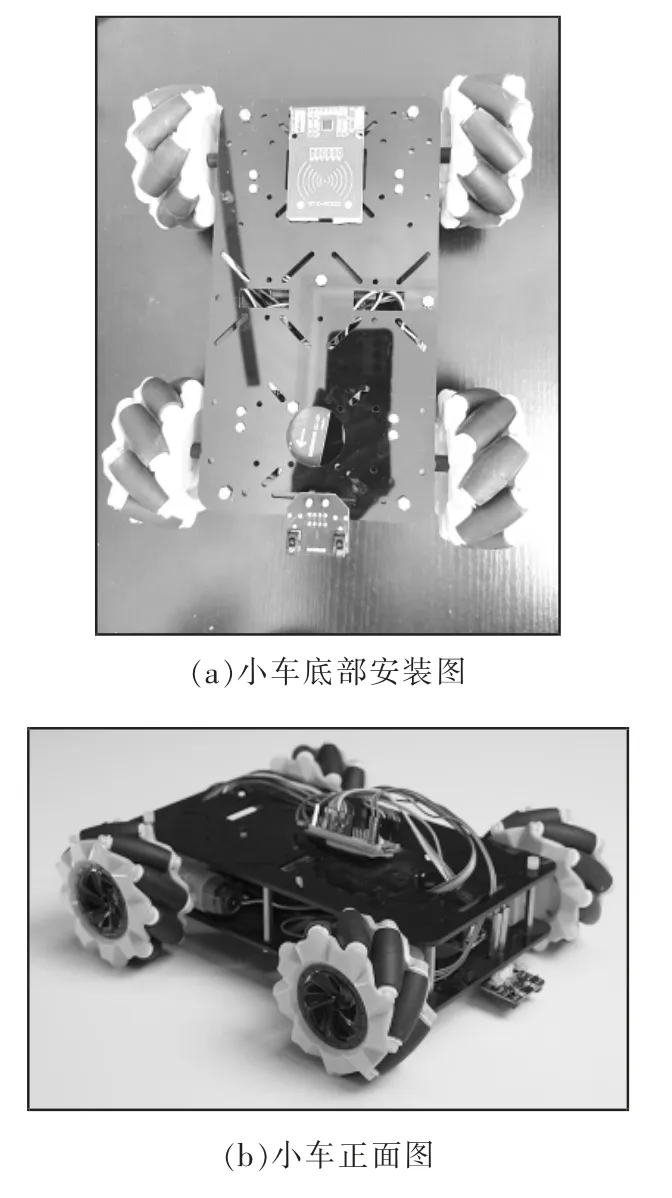
图6 小车实物图Fig.6 Physical drawing of trolley
4.2 软件调试结果
采用红外传感器进行循迹,通过传感器状态控制小车运行,经测试传感器状态与小车运行状态,与程序运行逻辑一致,测试结果如表1所示。传感器状态为(0,0)时,小车直行,传感器状态(0,1)时,小车左转,传感器状态(1,0)时,小车右转,传感器状态(1,1)时,小车停止,实现了对九宫格黑色路径的跟随。
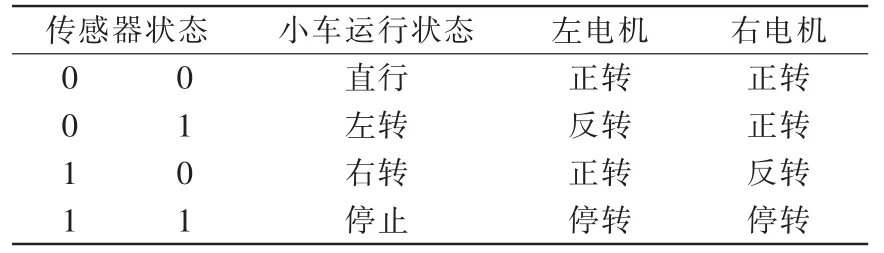
表1 传感器状态与小车运行状态调试结果表Tab.1 Commissioning results of sensor status and trolley operation status
采用RFID 射频识别模块对路径节点指令卡进行识别,在程序中将指令与射频卡卡号进行绑定,当阅读器检测到相应卡号时执行相应指令实现对小车运行方向的控制。经测试在小车运行过程中检测到指令卡时可以立即停止当前动作并执行对应指令,实现小车运行方向的控制。
4.3 系统整体调试结果
系统路径规划原理如图7所示,小车在九宫格区域行驶,在路径节点上摆放指令卡,当检测到不同指令卡时执行不同动作,红外循迹模块保证小车按路径行驶,可以在路径上放置不同的任务目标,引导学生进行路径规划,以达成任务目标的形式开发课程,将小车用于教学。搭建九宫格对编程智能车进行路径规划如图8所示。这里采用8 张指令卡,指令卡包含相应的动作指令(启动,停止,右转,直行,左转),小车起点和终点在九宫格上可以任意设定。小车启动电源,识别到启动指令卡,开始沿着九宫格路径直行,识别到右转指令卡后,右转,在九宫格上方路径一个交叉口,识别到右转指令,小车右转后直行,在十字交叉口,识别到直行指令,继续直行行进,沿着此路径,在第二个十字交叉口,识别到左转指令,小车左转直行,第三个十字交叉口,识别到直行指令卡,小车继续直行,在九宫格右侧路径交叉口,识别到右转指令,右转直行后,识别到停止指令卡,小车停止运行。
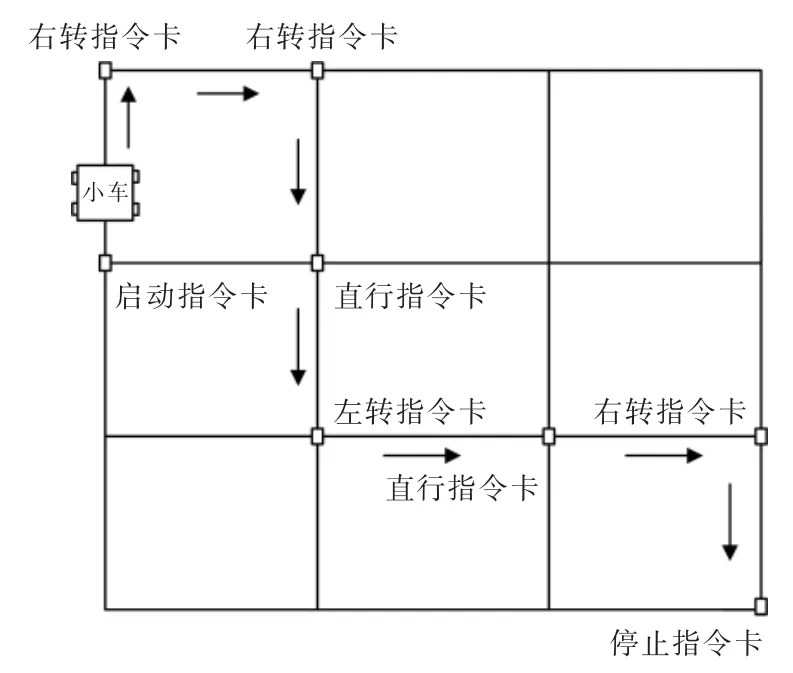
图7 编程小车路径规划原理图Fig.7 Schematic diagram of programming with instruction card to realize path planning

图8 小车九宫格轨迹循迹测试Fig.8 Tracking test of the car’s Jiugongge trajectory
通过系统调试,本文所设计的软硬件系统可以较好地实现小车的循迹及路径规划,经测试系统运行稳定,识别精度高达99%,响应速度速快。
5 结语
基于射频识别技术的编程教学小车可以准确地按照九宫格黑色路径行进,并对路径上的方向指令卡快速地进行识别以执行相应的方向控制,指令卡可重复使用,识别精度高达99%。解决了传统编程小车指令贴纸利用率低等问题,利用本系统所设计的编程小车开发逻辑思维训练课程,引导学生根据课程任务将指令卡放置到九宫格节点上完成目标,可以对学生逻辑思维能力进行锻炼。
猜你喜欢
数学小灵通(1-2年级)(2022年12期)2022-12-23 05:38:28
湘潭大学自然科学学报(2022年2期)2022-07-28 05:26:46
快乐语文(2020年36期)2021-01-14 01:10:32
幽默大师(漫话国学)(2020年12期)2020-12-03 04:09:14
科学大众(2020年17期)2020-10-27 02:49:02
小学科学(学生版)(2019年2期)2019-03-01 05:40:40
文苑(2018年22期)2018-11-19 02:54:18
电子测试(2018年15期)2018-09-26 06:01:14
电子制作(2018年8期)2018-06-26 06:43:02
电子制作(2017年1期)2017-05-17 03:54:20
