
基于高速公路事故黑点的检测器优化布设
2022-04-27 00:37张浩楠雷林龙
测控技术 2022年4期
于 泉, 张浩楠, 雷林龙
(北方工业大学 电气与控制工程学院,北京 100144)
高速公路事故黑点是指在各种外界因素影响下,在一个较长的时间段内,发生事故的数量明显偏高的点,也叫事故多发点。如何在高速公路事故多发点附近有针对性地布设检测器,使其对发生的事故能快速反应,不仅可以降低二次事故的发生率,而且能极大地提高道路通行效率。从理论上看,其周围检测器布置的数量越多,密度越大,则事故检测时间越快,但当检测器布设间隔达到一定的密集程度后,再继续布设检测器并不会显著缩短事故反应时间,反而会造成交通信息数据量的大幅增加。此外,车辆行程时间的测算需要检测器尽可能地分散布设。
熊丹等[1]针对突发性交通事件,提出基于增量比较法的交通事件快速自动检测模型,通过案例分析得出山区高速公路主线检测器布设间距建议;柳波等[2]证明了最小检测器布设数目的存在性和唯一性,提出了解决高速公路最少检测器布设问题的方法,该方法简单、易于操作,并且可以在城市路网中应用;杜树樱[3]从增设固定检测器和增加移动探测车两个方面来优化高速公路检测器的布设,提高检测数据精度;栾鑫等[4]以降低检测器布设综合费用和提高路段流量推算可靠性为目标,建立了多目标检测器优化布设方案,通过Nguyen-Dupuis和Sioux-Fall网络对算例进行对比分析,结果表明该模型不仅有效而且能应用于中大型网络;Hadavi等[5]针对检测器规划问题中存在的多变量、多整数约束等问题,提出一种减少选址问题规模的办法,并运用两种贪婪算法求解;Salari等[6]考虑检测器的故障情况,组合搭配基本和高级两种类型的检测器,以实现最小化成本、最大化交通数据采集。
现有文献大多局限于交通正常运行情况下检测器的布设,通过研究各类型检测器组合配置布设,以提高交通数据采集的精度。但不同的道路类型、不同的路段,检测器布设需因地制宜,因此本文有针对性地研究高速公路事故多发路段检测器布设方案,考虑交通正常运行和事故发生两种交通状态,建立检测器布设模型,通过离散二进制粒子群算法求解,并用实际案例验证了模型的有效性。本文的主要创新点如下:
① 借助VISSIM仿真平台[7],研究了检测器在不同布设间距的情况下,高速公路发生事故后,检测器布设间距、事故检测时间和交通量之间的关系。
② 以正常情况下车辆行程时间估计可靠性为目标,考虑事故检测时间,建立针对事故黑点的检测器布设模型,用离散二进制粒子群算法求解,得出事故多发路段检测器最优布设方案,既实现了数据的可靠采集又使事故检测时间最短。
1 检测器布设间距、事故检测时间、交通量三者关系研究
路段上的交通参数具有连续性,若路段某一位置发生异常状态(如撞车、抛锚等)[8]必然影响该位置上下游道路的交通状况,根据事故发生位置上下游交通参数的变化,将得知该路段是否发生交通事故。为了合理研究检测器布设间距、事故检测时间和交通量三者之间的关系,以交通流检测器为数据采集设备,分别在布设间距为100 m、200 m、300 m、500 m、800 m、1000 m的情况下采集交通数据。
1.1 VISSIM仿真
(1) 参数标定。
以北京市延庆区延崇高速某路段双向四车道道路进行路网搭建,单条车道宽度为3.5 m,路段长度为3 km,其中小车占80%、大型车辆占20%,设计速度为80 km/h,基本路段输入交通量为3000 pcu/h,仿真时间为3600 s(保证数据量),数据采集周期为1 s。一般情况下高速公路事故持续时间为15~30 min,因此本次仿真中将事故持续时间设定为15 min[9],从900 s开始到1800 s结束,在路段南向北1500 m处最内侧车道采用VISSIM中的Parking Lots模块模拟事故多发点。事故多发点和车辆停止情况,如图1所示。图2为间隔100 m布设检测器示意图,红色数字为检测器编号。
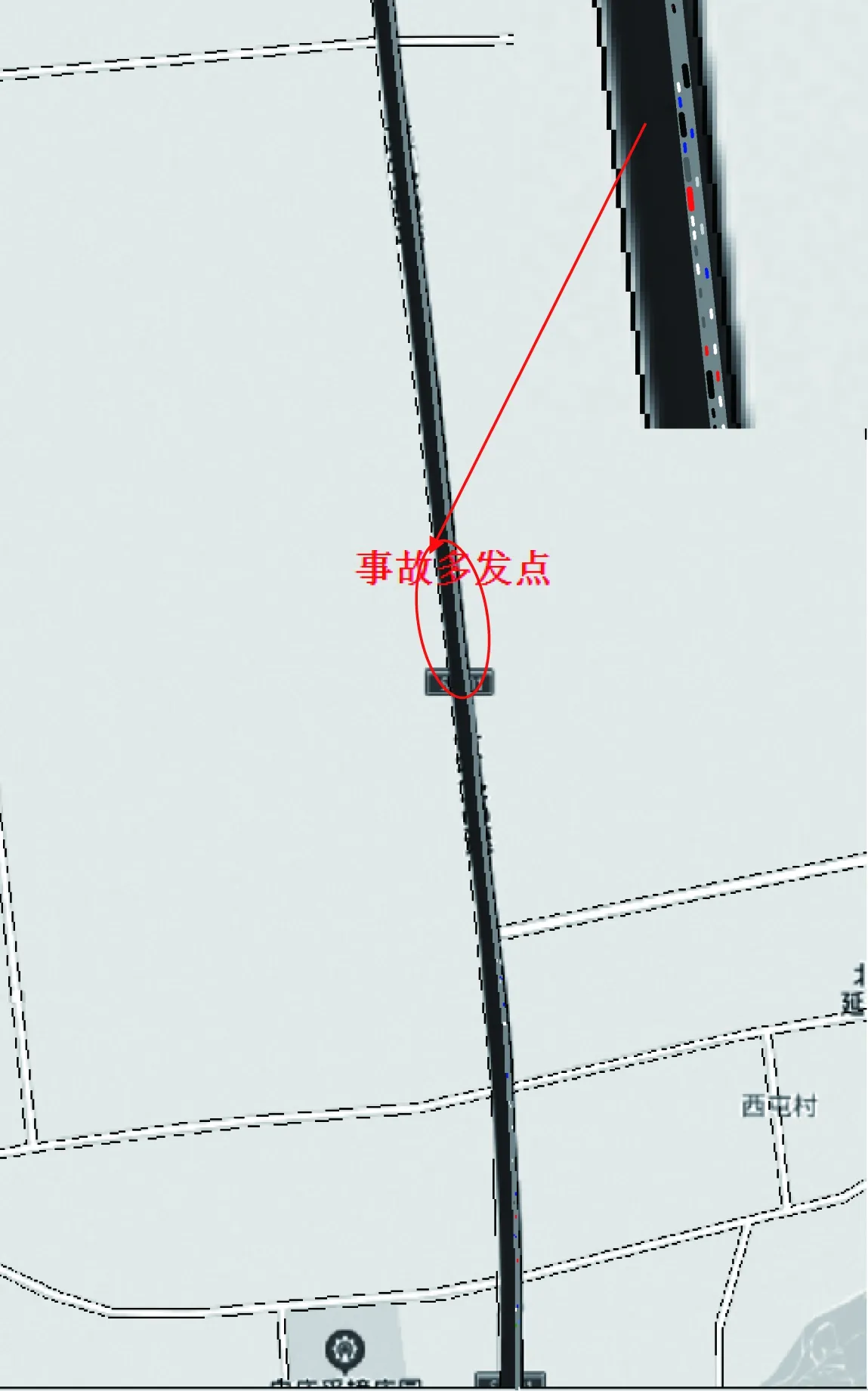
图1 路段事故多发点及车辆运行状况仿真图

图2 间隔100 m布设检测器
(2) 确定速度变化范围。
对于车辆速度变化整个过程而言,其必定存在两个关键点,即前速度变化点(车速变化前那一瞬间的速度)和后速度变化点(变化完成后那一瞬间的速度)。在前速度变化点之前和后速度变化点之后,车辆速度通常维持在某一定值附近,在速度变化范围内,车速呈现上升或下降趋势,该时期车辆加速度总体趋于正值或负值。从前速度变化点到后速度变化点之间所需的时间,即为速度变化时间,如图3所示。
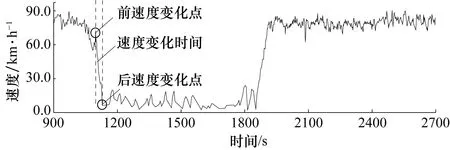
图3 速度变化曲线图
(3) 确定事故检测时间。
事故检测时间即从事故发生开始至检测器检测到车速发生变化后所需的时间。本文以速度和加速度数据判断事故的发生。因此,只需确定后速度变化点对应的时刻,即可根据式(1)计算检测时间。
T=Tv-Ta
(1)
式中:T为事故检测时间;Tv为后速度变化点时刻;Ta为事故发生时刻,本实验中为900 s。
1.2 数据分析
提取VISSIM仿真结果中事故持续时间段900~1800 s的数据,选取其中6个检测器(14号、13号、12号、10号、7号、5号)其分别对应间隔100 m、200 m、300 m、500 m、800 m、1000 m的布设情况。分析这些检测器的速度和加速度数据,确定后速度变化点,利用式(1)计算检测时间。以14号检测器为例,图4为该检测器速度采集结果,图5为加速度采集结果,表1为14号检测器采集的加速度数据。
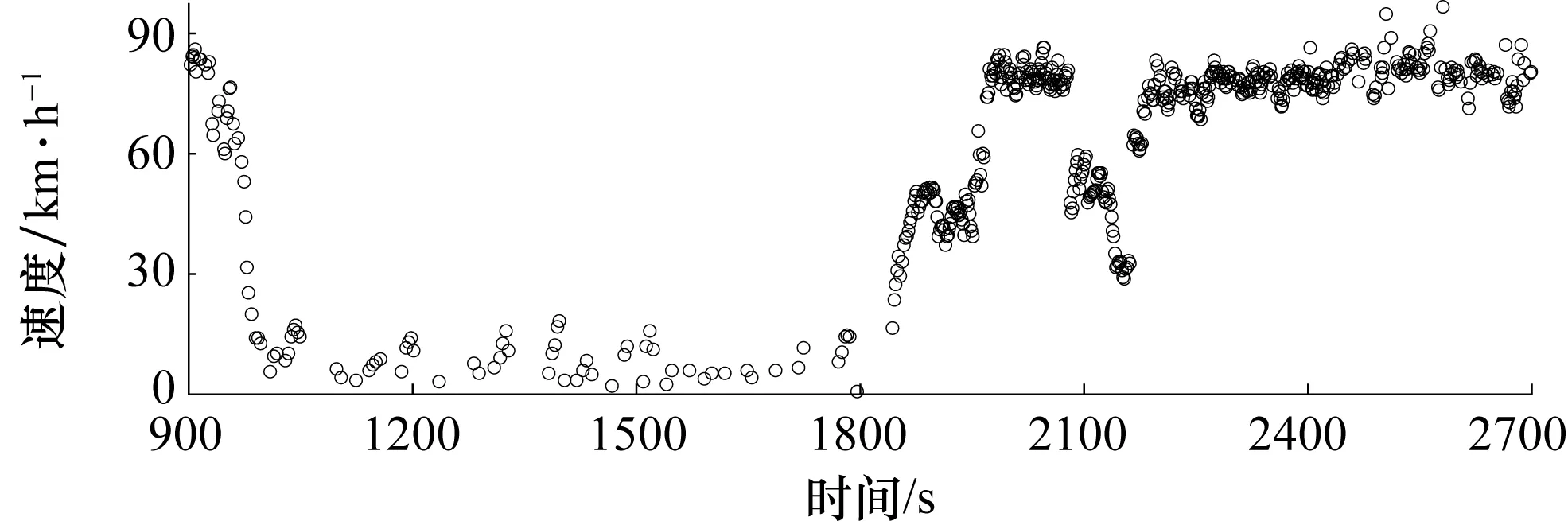
图4 间隔100 m布设检测器时14号检测器采集的速度数据
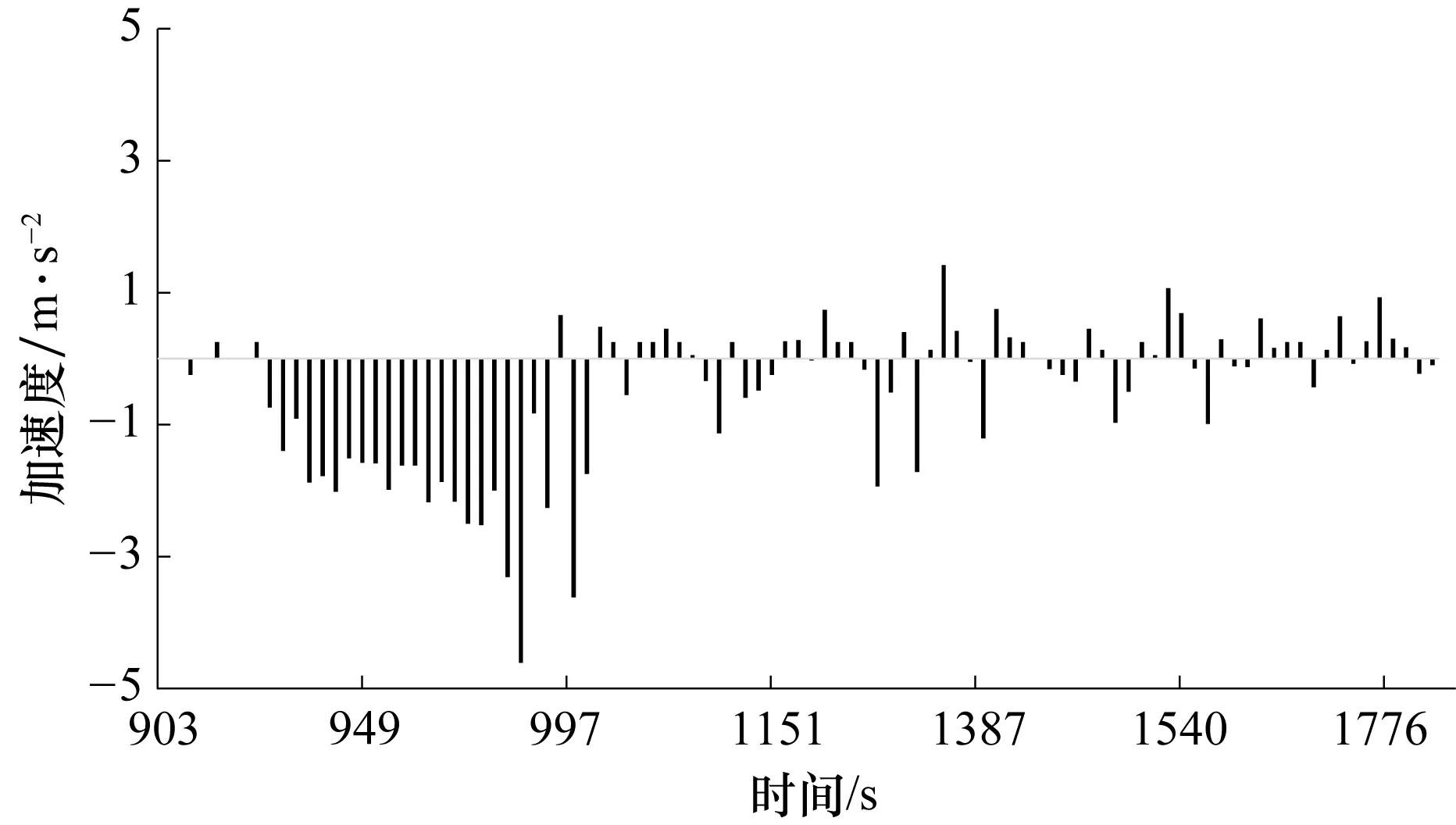
图5 间隔100 m布设检测器时14号检测器采集的加速度数据
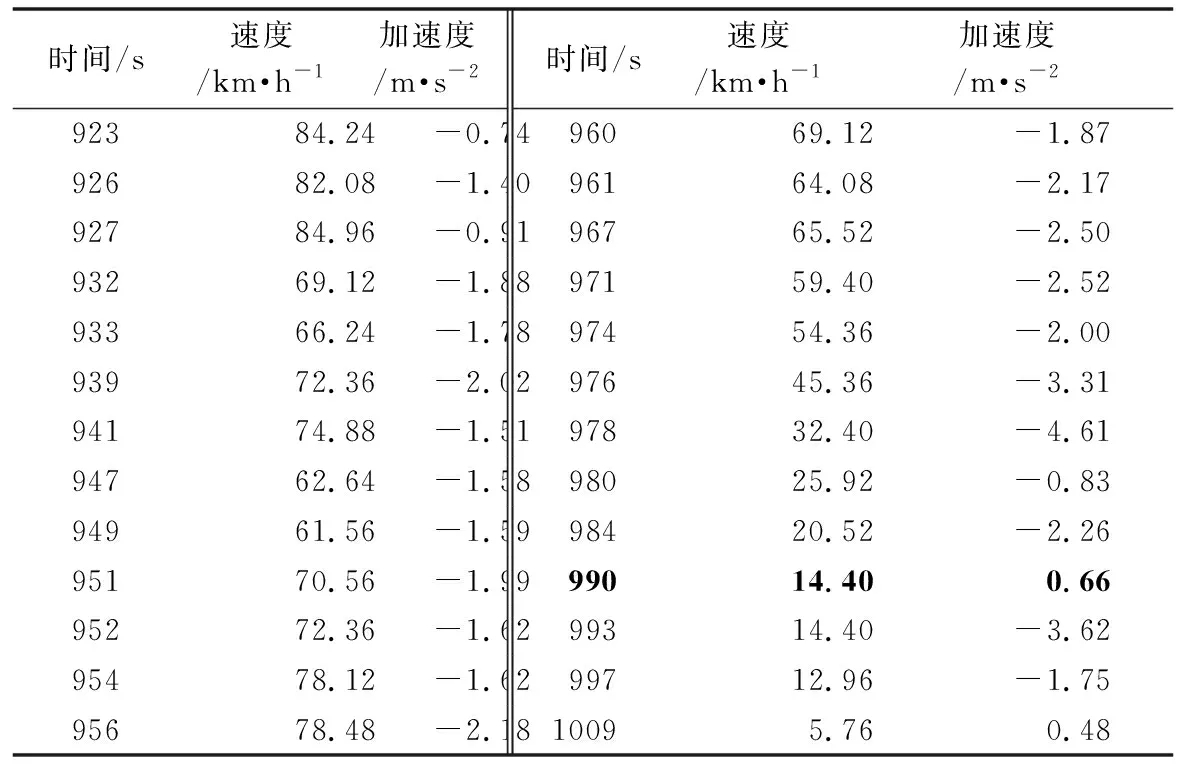
表1 900 s开始14号检测器速度和加速度数据
图4显示了14号检测器采集的车辆速度呈现先降后升变化,960 s之前车辆速度大都在85 km/h上下波动,960~1020 s速度下降,1020~1800 s速度在10 km/h上下波动,之后速度又回升到85 km/h。其加速度在此期间总体为负值,该时间段就是车辆减速过程。因此确定前速度变化点时刻为923 s即整个车流开始减速的时刻,后速度变化点时刻为1009 s从该时刻开始道路车辆速度开始在10 km/h上下。那么14号检测器事故检测时间为:T14=1009-900=109 s。
1.3 三者关系
分别确定剩余检测器后速度变化点时刻,计算事故检测时间,如表2所示。
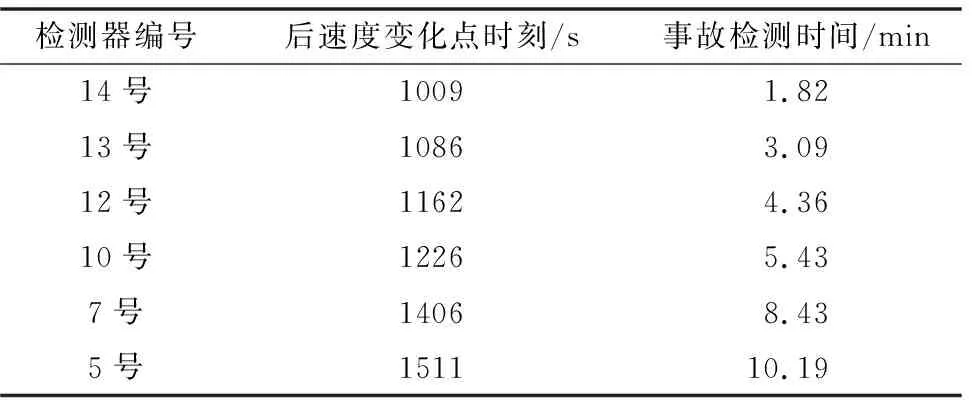
表2 检测时间汇总
对数据线性拟合,其R2=0.993(R2越接近1拟合效果越好,通常认定R2>0.5即两者存在相关性),得出布设间距与检测时间回归方程:
y=0.009x+1.205
(2)
式中:y为事故检测时间;x为检测器到事故发生点的距离,其值不能取零。
14号检测器检测时间最短,即间隔100 m布设检测器发现事故时间最短。为了研究流量与事故检测时间的关系,在其他参数不变的情况下,选定14号即检测器间隔100 m布设,调节道路流量变化,分别改变车流量参数为500辆、1000辆、1500辆、2000辆、2500辆、3000辆、3500辆,进行仿真实验,输出结果如图6所示。
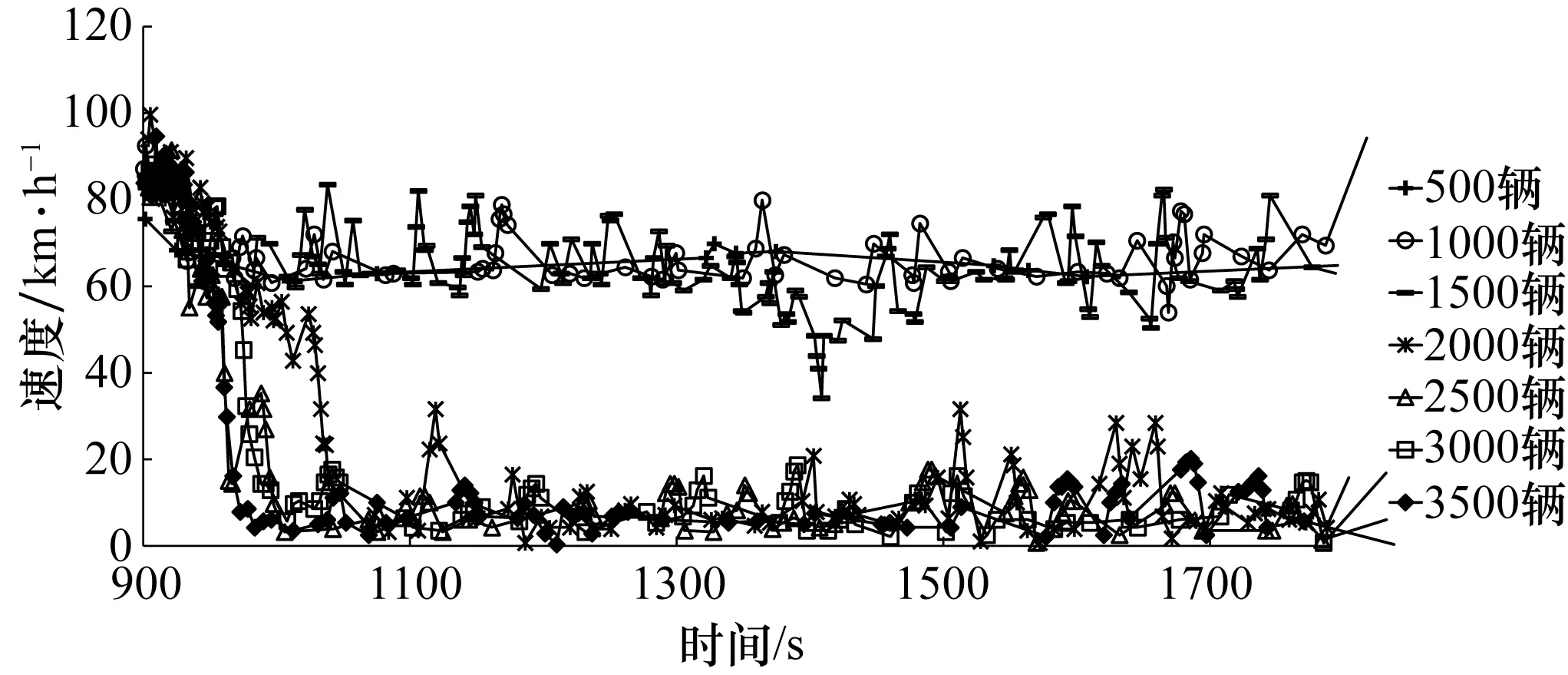
图6 部分车流量与检测时间关系图
当道路流量在500~1500辆之间时,车辆速度并没有明显的骤减,只有小幅度波动,该种情况交通事故的发生并没有造成道路拥堵的出现。
进一步研究车流量从500辆开始按100辆递增至3500辆的情况。通过对统计数据进行分析发现,道路车流量在1800辆以下时,车辆速度并没有明显的骤减,只有小幅度波动,该种情况交通事故的发生并没有造成道路拥堵的出现。当车流量为1900辆时,车辆速度均出现骤减,有轻微拥堵,当车流量在2000辆以上时,车辆速度大幅骤减,产生明显拥堵现象。统计车流量2000辆以上时14号检测器所需事故检测时间,如表3所示(仅显示了车流量按500辆递增的数据)。
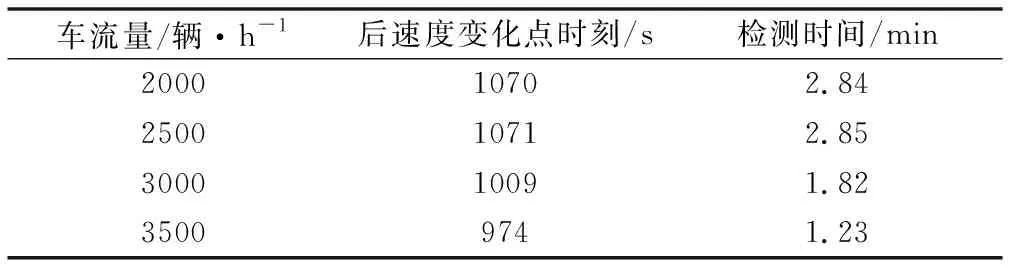
表3 间隔100 m增加车流量检测时间变化
对车流量和检测时间线性拟合,其R2=0.896,回归方程为
y=-0.001x+5.408
(3)
式中:y为检测时间;x为车流量。该拟合方程为14号检测器下车流量与事故检测时间的关系。
2 基于离散粒子群算法的高速公路检测器布设模型
2.1 问题分析
在研究之前首先对道路进行划分,其目的是确定交通流检测器待布设点,主要有两大类划分方法:定长划分法和不定长划分法[10]。定长划分操作简单,适用于地形简单、线形变化不大的道路;不定长划分则是根据道路相关交通参数,将其分布相同或相似的聚为一类,具体划分方式视道路实际情况而定。
设定道路总长度为L,沿交通方向将道路划分成i段并依次从1~i顺序编号,每一段长度为Li,假设检测器待布设点位为每一小段中点,如图7所示,图7中黑色实心圆即为检测器待布设点,设检测器的编号为1~n,布设数量为n,则n≤i。
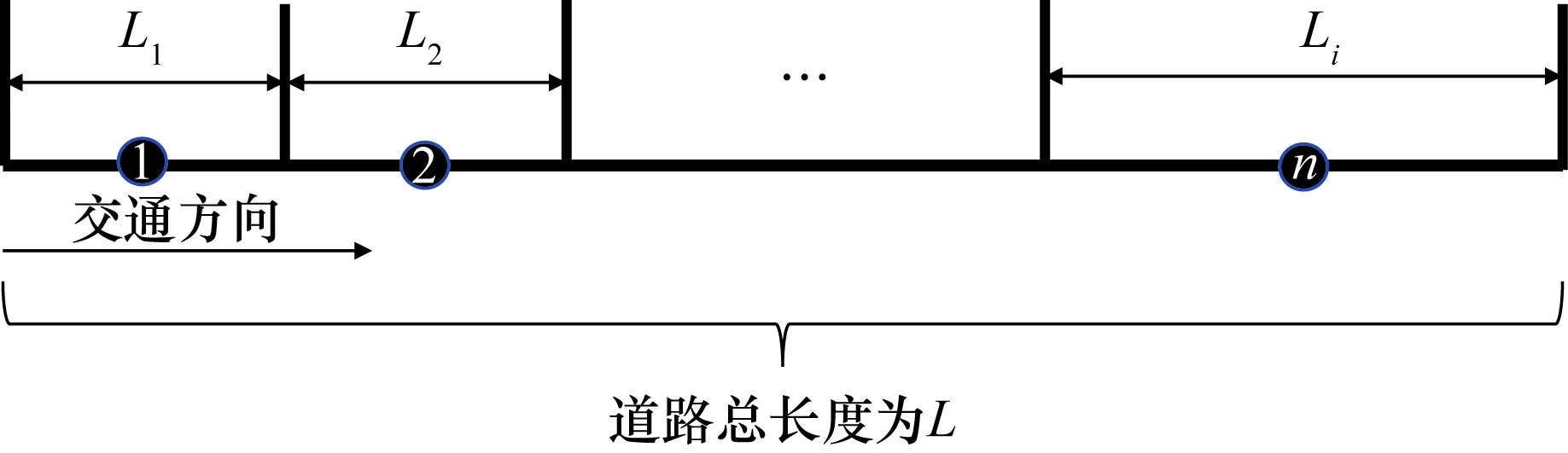
图7 道路交通检测器布设示意图
将路段行程时间估计可靠性作为检测器布设优化的目标,路段行程时间估计可靠性就是用检测器采集到的地点交通参数来估计路段的平均行程时间,然后与实际路段行程时间对比,计算两者误差。在误差较小的情况下和容许的事故检测时间之内,检测器的布设位置和数量即为求解结果。
2.2 布设模型
(1) 实际路段行程时间。
实际路段行程时间Ta可以通过布设在道路起点和终点的一对行程时间检测器直接采集得到。
(2) 估算路段行程时间。
依据检测器位置将道路划分为n+1个区间路段,其长度为该检测器距道路起点的距离,表示为S1,S2,…,Sn,最后一个区间路段长度为L-Sn,如图8所示。将检测器采集到的车辆速度数据当作区间平均速度,再基于区间平均速度估算整个路段行程时间。观察n+1个区间路段,不难发现可以分为3个部分估算路段行程时间:起点区间路段,即道路起点到第一个检测器的路段;中间区间路段,即检测器与检测器之间的路段;终点区间路段,即最后一个检测器到道路终点的路段。
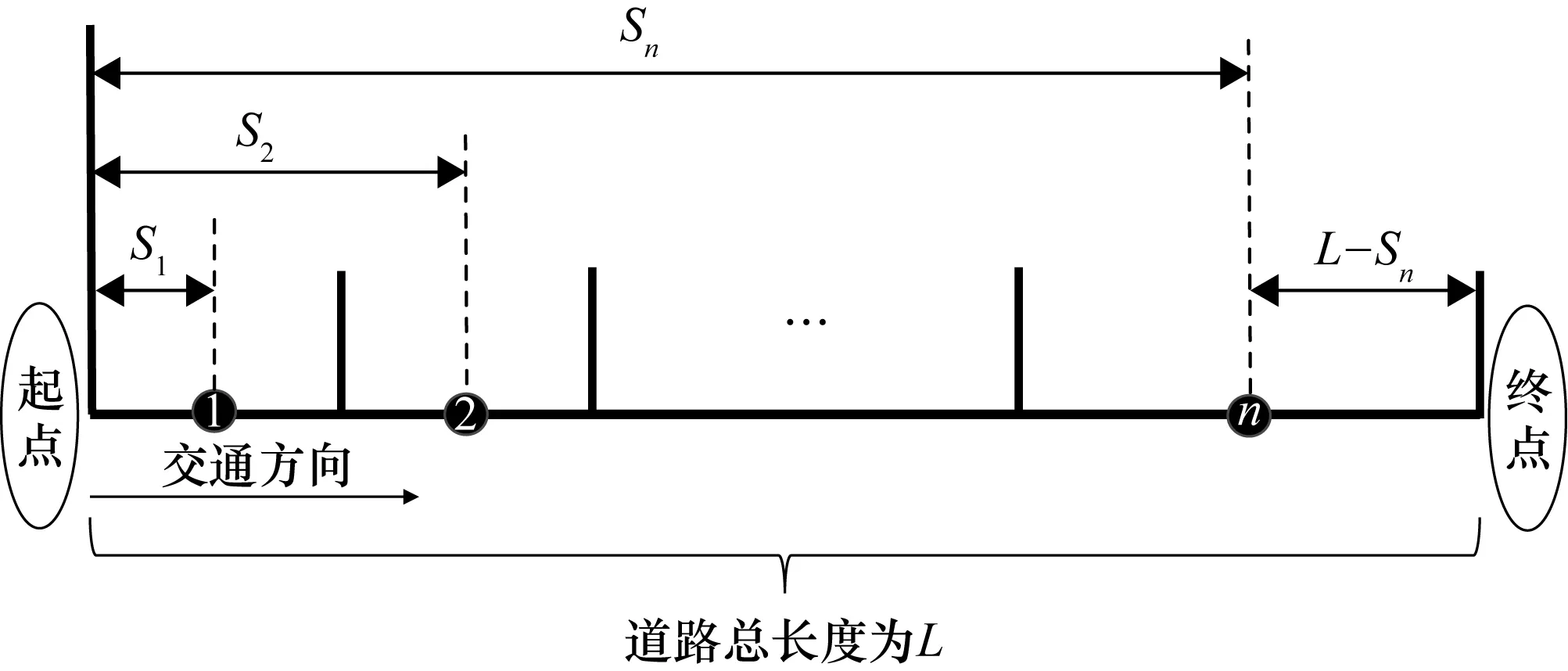
图8 道路区间划分
① 起点区间路段,其区间平均速度直接取第一个检测器采集的车辆速度的平均值[11],其计算公式为
(4)
式中:To为起点区间路段行程时间估算值;S1为1号检测器到起点的距离;V1为1号检测器采集的所有车辆速度的平均值。
② 中间区间路段,即检测器与检测器之间的路段,其区间平均速度等于两端检测器的区间平均速度的平均值,则其行程时间计算公式为
(5)
式中:Tm为中间区间路段行程时间估算值;n为检测器个数,0 ③ 终点区间路段,其区间平均速度直接取最后一个检测器采集的车辆速度的平均值,计算公式为 (6) 式中:Td为终点区间路段行程时间估算值;L-Sn为n号检测器距道路终点的距离。 则估算路段行程时间为这3个部分之和: Te=To+Tm+Td (7) 在一定的成本条件下,考虑正常和事故两种交通状态,寻找检测器的最佳布设位置和布设数量,使道路行程时间估计值和实际道路行程时间误差最小,并且当事故发生造成拥堵时能快速识别。引入0-1变量xi=0或1,xi=1表示在第i个路段上布设检测器,xi=0表示在第i个路段上不布设检测器。模型如下: minf=|Ta-Te| (8) s.t.T=∑(0.009dn+1.205) (9) ∑xi=q (10) q≤i (11) qr≤R (12) 其中:式(8)是目标函数,表示实际路段行程时间和估算路段行程时间之间的误差;式(9)表示布设在事故多发点前且距离事故多发点最近的检测器的事故检测时间;dn为事故多发点到其前方最近的检测器的距离;式(10)表示检测器布设数量约束,q为布设检测器数量;式(11)限制了检测器的数量小于等于划分路段个数;式(12)考虑了经济因素,r为检测器单价,R为可提供预算;xi表示对于任意路段i,其要么布设检测器,要么不布设检测器,若布设检测器,检测器数量仅为一个。 粒子群优化算法(Particle Swarm Optimization,PSO)是一种智能优化算法,由美国Kennedy和Eberhart教授于1995年源于对鸟群捕食行为的研究而提出[12]。相比于遗传算法(Genetic Algorithm,GA)等其他智能优化算法,其具有简单、参数调节少、收敛速度快、求解质量高等优点。 假设在一个D维的搜索空间,由n个粒子组成的种群X=(X1,X2,…,Xn),其中第i个粒子的位置表示为一个D维的向量Xi=[xi1,xi2,…,xiD]T,也是问题的一个潜在解;该粒子速度表示为Vi=[Vi1,Vi2,…,ViD]T;个体极值为Pi=[Pi1,Pi2,…,PiD]T;群体极值为Pg=[Pg1,Pg2,…,PgD]T。每次迭代中粒子通过个体极值和群体极值更新自身的速度和位置,即 (13) 式中:k为当前迭代次数;w为惯性权重;d=1,2,…,D;i=1,2,…,n;c1和c2为加速因子;r1和r2为分布在[0,1]区间的随机数。 标准粒子群算法中粒子本身的位置和速度是连续变量,无法解决本文提出的离散问题,因此引入离散二进制粒子群算法(Discrete Binary Particle Swarm Optimization Algorithm,BPSO)求解[13-14]。BPSO算法的速度更新公式与PSO算法一样,但是粒子位置更新公式发生变化。采用Sigmoid函数将速度值映射到区间[0,1]上: (14) 式中:S(vid)为粒子位置取1的概率,粒子通过式(15)改变位置: (15) 结合检测器布设模型,算法的具体步骤如下。 ① 确定算法输入变量,主要有道路划分段数、道路长度和事故多发点位置等。 ② 随机初始化一个二进制串组成的种群,位置为X=(x1,x2,…,xi),i表示路段编号,xi=0或1,xi=1表示在第i个路段上布设检测器,xi=0表示在第i个路段上不布设检测器,计算初始适应度值和事件检测时间。 ③ 按式(15)更新粒子位置,重新计算适应度值和事件检测时间,并与前一代最优值比较,循环迭代。 ④ 满足终止条件,迭代完成。 根据以上分析并进行反复试验,得到本实验相对较优的参数,如表4所示。 表4 相关实验参数输入 以布设一个检测器为例,用BPSO和GA求解,取50次运算结果的平均值,如表5所示。 表5 布设1个检测器模型结果 可以发现虽然BPSO和GA都寻得最优解,但是相比于GA,BPSO算法更早出现最优代。 将检测器布设数量约束条件的参数依次调节为1~25,该路段最多布设25个检测器,分别求出不同布设数量下的最优解,如图9所示。 图9 粒子群算法求解 当检测器数量从1个增加到5个时,车辆行程时间估计误差迅速减小;当检测器布设数量从5个开始,即使增多检测器,行程时间误差也基本保持不变,说明在现有道路上增加少量检测器能大幅提高交通数据检测水平。并且进一步研究了布设1~4个检测器时的检测效果,如表6所示。 表6 布设不同数量检测器检测结果 当布设数量为3个时,可以发现事故检测时间急剧减小,这是由12号检测器决定的,其布设在事故多发点前方且距离事故多发点最近;并且布设n个检测器的最优位置是在布设n-1个检测器最优位置基础上而来的。考虑经济因素和事故检测时间,本文将针对事故多发路段的最优检测器布设数量定为5个,既达到交通数据的可靠采集,又在发生事故时能快速检测。 传统的高速公路检测器布设往往采用经验布设法,一般间隔500~1000 m布设一个检测器,文献[15]基于手机信令数据,通过BP神经网络实现车辆行程时间融合估计,研究高速公路固定检测器的布设方法,得出检测器布设间距在1000~1500 m最为合适。本文分别以间隔500 m的经验布设法case1、间隔1000 m的基于手机信令数据的检测器布设法case2与本文提出的布设方案case3对比,结果如表7所示。 表7 3种检测器布设方案对比 可以看出,虽然3种方案的车辆行程时间估算误差非常接近,但本文提出的方案,事故检测时间最少;尽管case2的检测器布设数量最少,但其仅考虑交通正常运行状态,与case3的事故检测时间相差较大。因此针对高速公路事故多发点,本文提出的方案是有效的、可行的。 基于VISSIM仿真分别研究了检测器不同布设间距下,检测间距与事故检测时间的关系;得出事故检测时间-布设间距模型,并详细研究了14号检测器下,车流量的变化与事故检测时间两者关系,得出事故检测时间-车流量模型。基于事故检测时间-布设间距模型,通过BPSO算法求解以车辆行程时间估计可靠性为目标的高速公路检测器布设模型,考虑事故检测时间,得出事故多发点附近的检测器最优布设方案;通过与其他布设方案对比,表明本文提出的检测器布设模型是有效的,但是本模型仅针对高速公路事故多发路段,因此实际工程应用中往往要与其他方案组合使用,以达到最大效益。2.3 离散二进制粒子群算法
3 实例分析

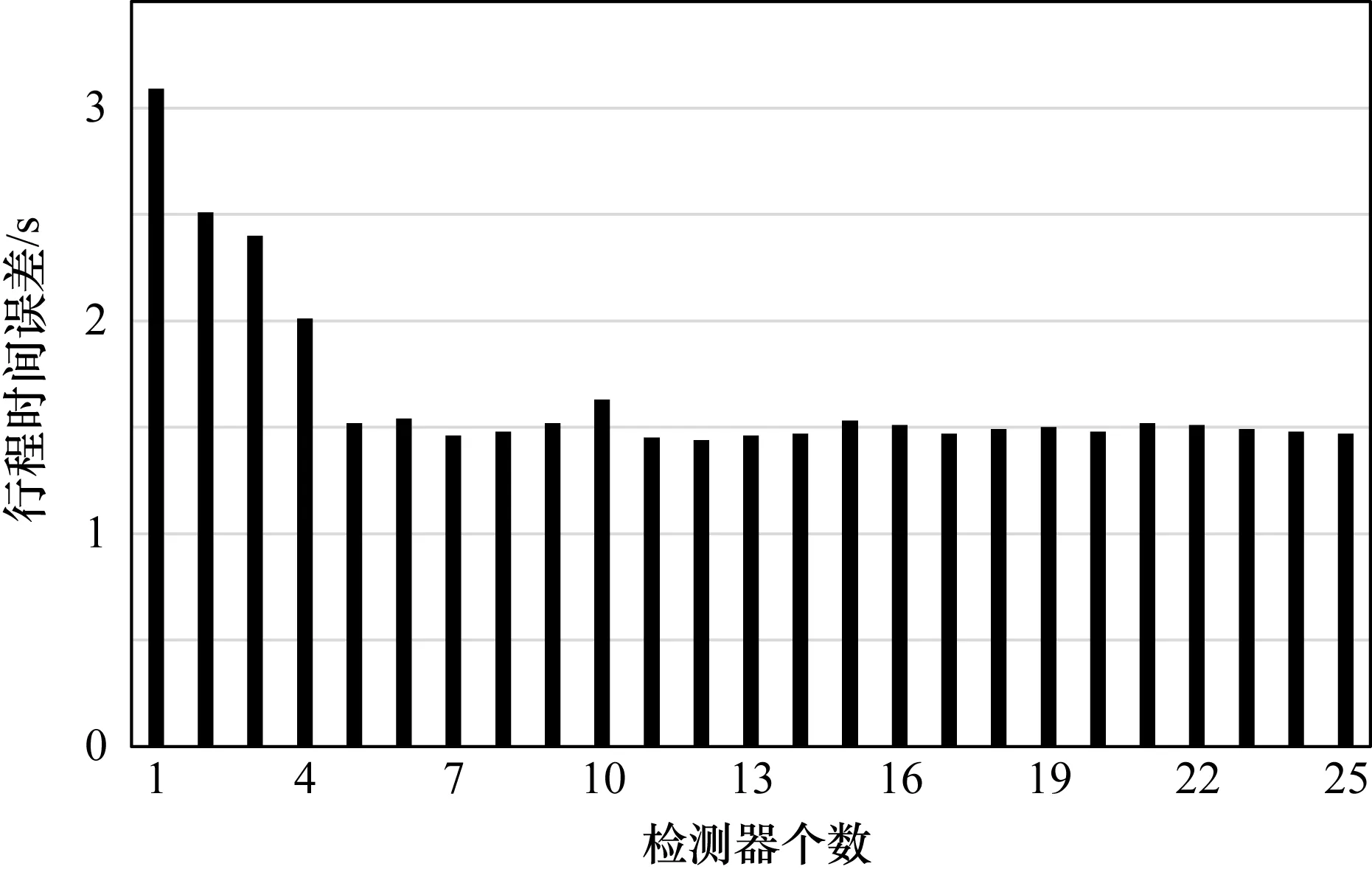
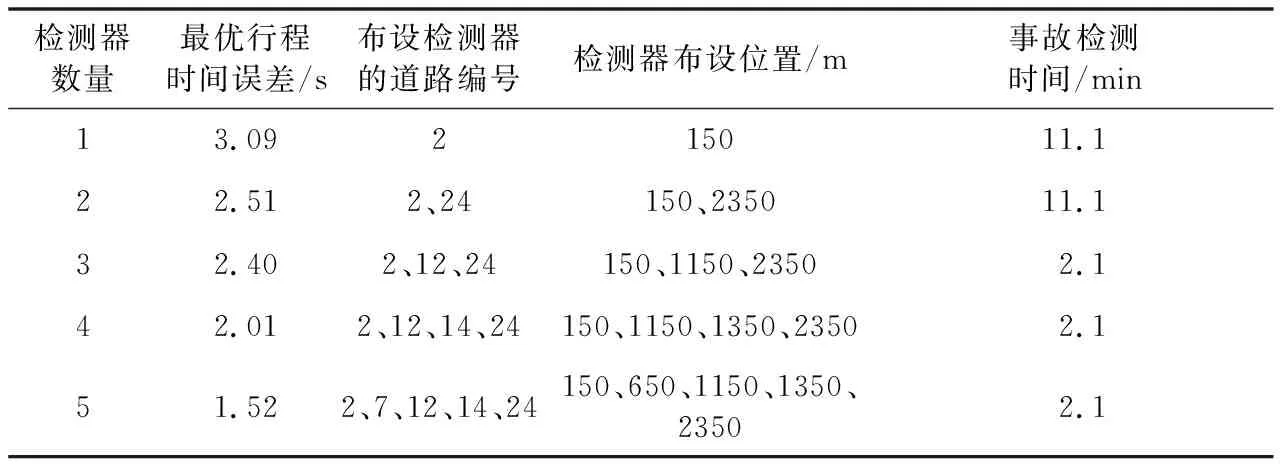
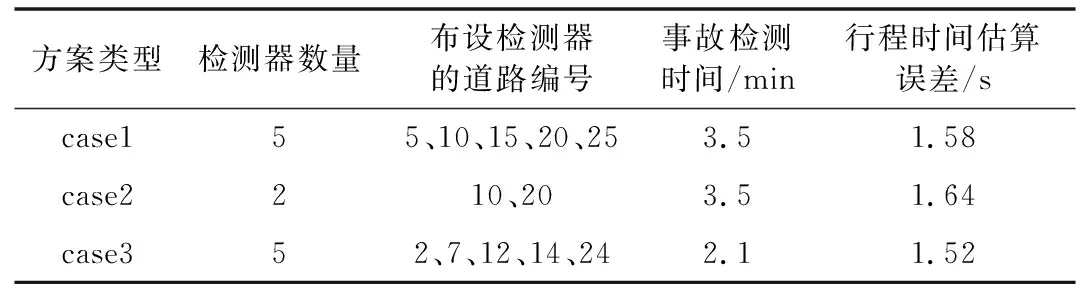
4 结束语
猜你喜欢
中国交通信息化(2022年7期)2022-10-27
智富时代(2018年5期)2018-07-18
智富时代(2018年5期)2018-07-18
科技风(2018年15期)2018-05-14
魅力中国(2016年52期)2017-09-01
数学教学通讯·初中版(2015年5期)2015-06-17
