外骨骼伺服驱动器效率提升研究
2022-04-27 07:27:36吴庆勋李如飞张利剑
载人航天 2022年2期
马 宇, 吴庆勋, 李如飞, 刘 昊, 张利剑
(北京机械设备研究所, 北京 100854)
1 引言
外骨骼是一种可穿戴人机协同机器人,可有效增强穿戴者力量,节省穿戴者体力,在军事、航天、医疗、救灾等方面用途广泛。 国内外对外骨骼的研究主要可分为助老助残外骨骼和助力型外骨骼。 其中助老助残型外骨骼主要用于辅助老年人、残疾人等行走,日本在助老助残外骨骼方面研究处于领先地位,日本筑波大学所研制的HAL 外骨骼为世界首款商业化产品,穿戴者几乎不用依靠自身力量即可完成站立行走。 而助力型外骨骼主要用于人体机能增强,日本Cyber⁃Dyne、美国Ekso Labs 及以色列Rewalk 等是目前进行此类外骨骼产品研制的主要机构。 国内起步较晚,有哈尔滨工业大学、中国兵器装备集团兵器装备研究所、北京机械设备研究所等单位目前在进行样机研制。
外骨骼的动力系统按照驱动方式可分为液压驱动、气动驱动以及电机驱动。 其中电机驱动以电机转动产生转矩,通过机械装置,执行结构按照预期方向进行能量传递。 由于电机驱动技术较为成熟,特别是伺服电机驱动系统具有响应速度快、控制精度高的优势,因此在国内外的外骨骼系统中普遍使用。
然而外骨骼在运行过程中一般需要自身携带电源,很大程度上限制了外骨骼的工作时长,所以能耗问题是限制外骨骼机器人发展的主要因素之一。 目前主要通过对结构、电池等方面进行能效优化,结构方面主要通过降低外骨骼运动关节等系统重量实现耗能减少;电池方面主要通过研究高能量密度电池从而提高外骨骼的工作时长。
本文针对以电机驱动为动力源的外骨骼进行效率提升,在不改变原有机械结构与电机驱动系统硬件的基础上,通过伺服电机驱动控制算法优化,以实现效率提升。
2 外骨骼伺服驱动控制算法
外骨骼需要对各个关节的运动轨迹进行精确控制,因此需要对伺服电机进行位置控制,其中位置伺服控制系统一般由位置环、速度环、电流环组成,通过闭环控制,实现对关节位置的精准操作。
其中对于永磁同步电机的控制一般采用磁场定向控制,也称矢量控制。 其控制算法已经非常成熟,具体为:通过坐标旋转变换,将永磁同步电机在三相静止坐标系下的复杂理论模型简化为两相旋转坐标系下的等效直流电动机模型,从而实现对电机的励磁电流与转矩电流的解耦独立控制。 常用的矢量控制策略有最大转矩/电流控制、弱磁控制、恒磁链控制、=0 控制等,其中=0控制方法简单,转矩特性良好,在高性能伺服控制驱动中被广泛使用。
为了让永磁同步电机(Permanent Magnet Syn⁃chronous Motor, PMSM)在空间上形成圆形旋转磁场,从而实现恒定电磁转矩,常规方法是采用空间矢量脉宽调制技术(Space Vector PWM,SVPWM),通过得到恒定大小的旋转电压矢量,从而得到恒定大小的旋转磁场。 SVPWM 将电机逆变器与磁场看作一个整体,将输入电压划分为6 个不同扇区,通过改变三相桥臂的导通状态,从而实现任意旋转的电压矢量,其具体控制框图如图1 所示,其中、、和分别为位置、速度、电流给定值,、和分别为速度、电流反馈值。

图1 永磁同步电机矢量控制结构框图Fig.1 Block diagram of vector control structure of the permanent magnet synchronous motor
3 基于不连续脉宽调整技术的效率优化控制方法
针对外骨骼的能耗限制问题,本文对电机驱动的调制策略进行优化,采用不连续脉宽调制技术(Discontinuous PWM, DPWM)代替SVPWM 调制策略,来减小电机驱动器的损耗,进而提高效率,延长外骨骼的工作时长。 其中DPWM,也称为 母 线 箝 位 PWM ( Bus⁃Clamping PWM,BCPWM),其调制信号在其周期的1/3期间被箝位到母线,因此在该箝位期间没有开关动作,相比常规SVPWM 而言,其开关次数降低为SVPWM的2/3,因此可有效降低开关损耗,从而提升驱动器效率。
3.1 调制策略归一化实现方法


图2 基于零序分量注入的归一化调制策略生成方法Fig.2 Normalized modulation strategy generation method based on zero⁃sequence component injection
通过改变零矢量分配因子,即可获得不同的调制策略。 图3(a)为SVPWM 调制策略下的电压矢量空间图,其被电压矢量划分为6 扇区,图中代表“000” 矢量,代表“111” 矢量。 当零矢量分配因子=0.5 时,即每个扇区内=1,=1,此时输出如图3(b)所示的SVPWM 调制策略的仿真调制波形。

图3 SVPWM 空间矢量图及调制波形示意图Fig.3 Space vector diagram and modulation wave⁃form under SVPWM modulation strategy
对于DPWM 调制策略,与上述过程类似,但由于箝位区间的不同,需将扇区进行细分,将每个扇区等分为2 份,由此6 扇区变为12 扇区。 以DPWM1 为例,图4 (a)为DPWM1 调制策略下的电压空间矢量图。 在1、4、5、8、9、12 扇区内零矢量分配因子=1,即=0,=1;在3、4、6、7、10、11 扇区内零矢量分配因子=0,即=1,=0;此时输出如图4 (b)所示的DPWM1 调制策略的仿真调制波。

图4 DPWM1 空间矢量图及调制波形示意图Fig. 4 Space vector diagram and modulation waveform under DPWM1 modulation strategy
3.2 损耗分析
电机驱动器的损耗主要为三相逆变电路中功率器件损耗,可分为导通损耗与开关损耗,其中开关损耗占比较高,而导通损耗受调制策略的影响较小,因此本文主要对不同调制策略下的开关损耗进行研究。
开关损耗理论上和当前的负载电流的幅值成比例变化,对于SVPWM 调制策略而言,由于是连续调制,无论功率因数角怎么变化,都不会对开关损耗产生影响。 因此,在半个基波周期上连续开关时的一相桥臂的开关损耗为式(4)所示。

其中,是用于确定开关损耗大小的等效直流电压,为峰值电流。 对于不连续调制策略,由于各DPWM 策略的箝位区间不同,因此损耗会根据功率因数角变化,当箝位区域与电流峰值对齐时损耗最小,因此需要根据不同功率因数的负载,选择不同的DPWM 调制策略,以实现开关损耗最小。
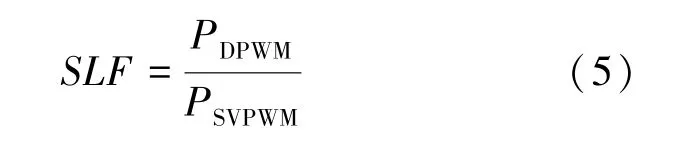
为了方便比较,进行归一化处理,将SVPWM调制策略产生的损耗作为基值。 定义开关损耗函数(Switching Loss Function,SLF),如式(5)所示。
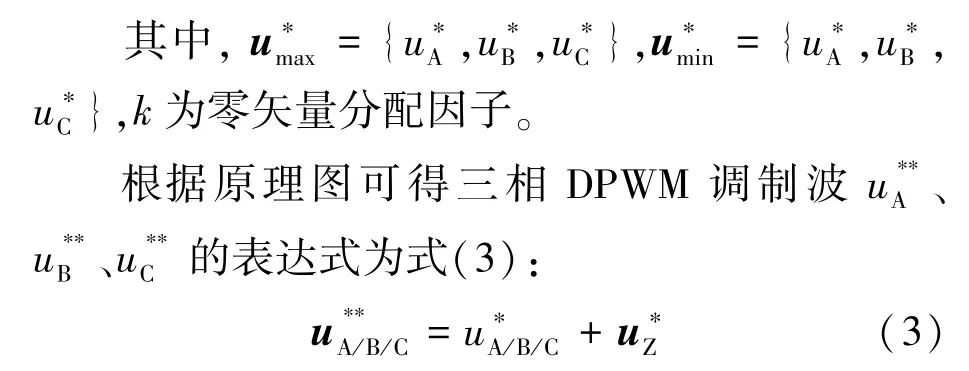
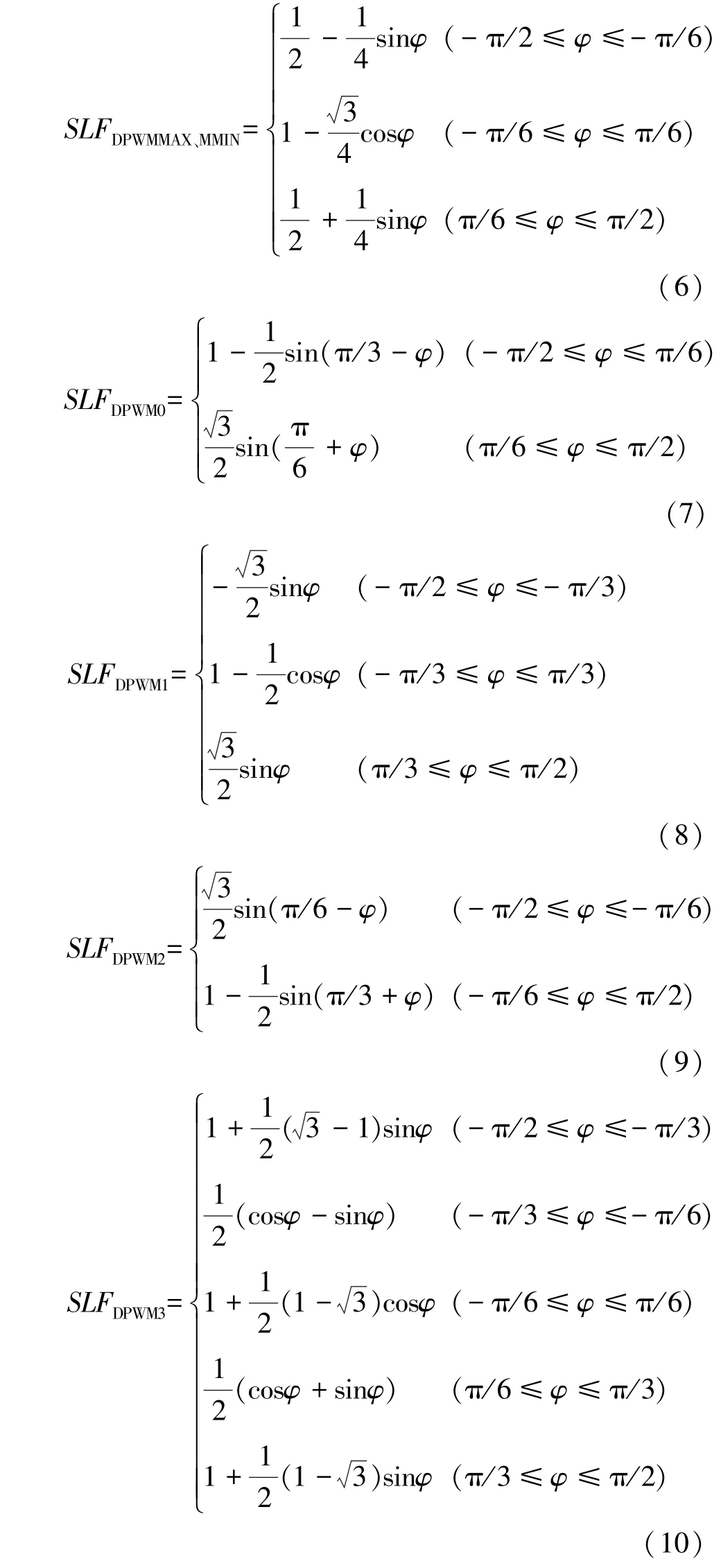
考虑功率因数角后,可以得出DPWMMAX、DPWMMIN、 DPWM0、DPWM1、DPWM2、DPWM3的开关损耗如式(6)~(10)所示。
绘制不同DPWM 调制策略的开关损耗函数随功率因数角的变化如图5 所示。 从图中可以看出,DPWM 调制策略和传统的SVPWM 调制相比,可以显著降低器件的开关损耗。 在单位功率因数角的工况下,DPWMMIN、DPWMMAX、DPWM0、DPWM2 这4 种方法所产生的开关损耗是相同的,是SVPWM 调制策略产生损耗的0.567 倍;DPWM3 相较于其他DPWM 调制策略,产生的开关损耗是最高的,是SVPWM 调制策略产生损耗的0.634 倍;DPWM1 产生的开关损耗是最低的,仅为SVPWM 调制策略产生损耗的0.5 倍。 随着功率因数角的变化,不同DPWM 产生的损耗也将不同,因此可根据负载的功率因数角可以选择最优的调制策略。
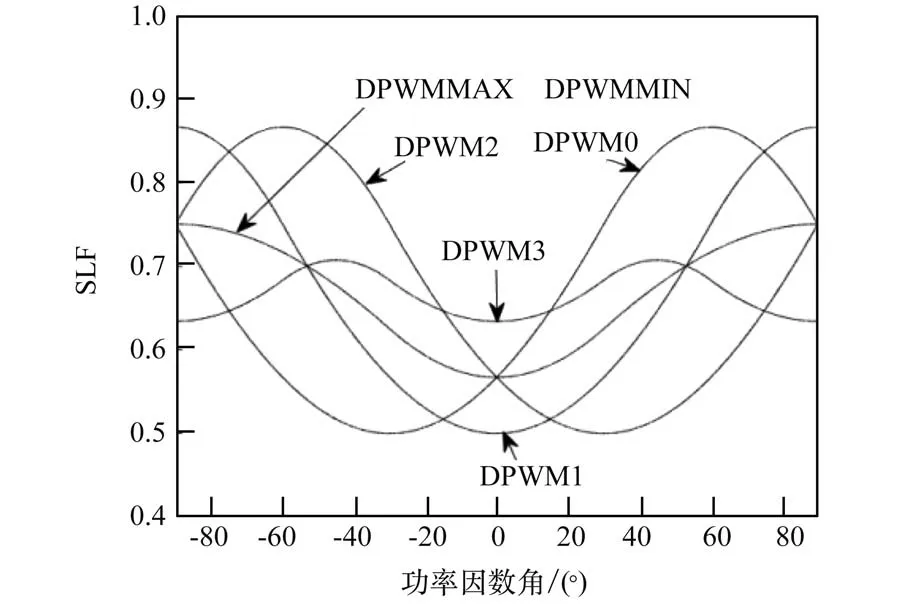
图5 不同调制策略下SLF 随功率因数角变化Fig.5 Variation of SLF with power factor angle under different modulation strategies
3.3 基于永磁同步电机的效率优化控制方法
当驱动器负载为永磁同步电机时,功率因数角可由永磁同步电机空间矢量图推导得到。图6 为永磁同步电机空间矢量图,其中为功率因数角,为内功率因数角,为功角,为转子位置角,即轴与A 轴之间的夹角。为定子电压的轴分量、为定子电压的轴分量,为定子电流的轴分量、为定子电流的轴分量。 定子电压与定子电流的夹角即为功率因数角。
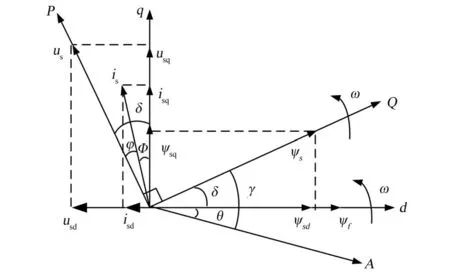
图6 永磁同步电机空间矢量图Fig.6 Space vector illustration of permanent magnet synchronous motor
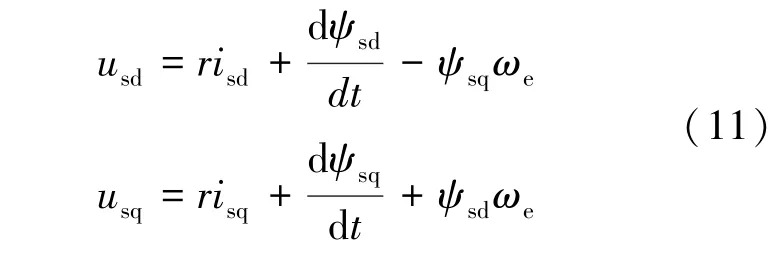
其中永磁同步电机定子电压方程满足式(11):
永磁同步电机定子磁链方程如式(12)所示。

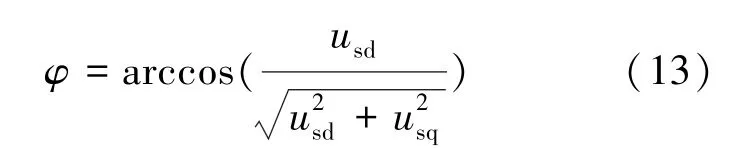
由于采用=0 控制,因此定子电流矢量在轴上,即=,=0,并且=0,=此时可通过采集驱动器输出的与来计算功率因数角的值,如式(13)所示。
对于永磁同步电机,功率因数一般均大于0.9,即功率因数角在0°~25°范围内。 因此在0°~15° 范围内,使用DPWM1 损耗更小,效率最优。 在15°~25°范围内,使用DPWM2 效率最优。鉴于在实际程序运算中,计算反三角函数较为困难,一般进行功率因数的计算,当计算得到的功率因数大于0.9659 时,使用DPWM1,反之则使用DPWM2。
本文通过实时计算功率因数,选择不同的DPWM 调制策略,并通过调制策略的归一化实现方法,进行调制策略的平滑切换,实现效率最优控制。
4 实验结果与分析
本文对外骨骼伺服驱动系统进行实验测试,其中电机参数为:=1.44 Ω,==3.2 mH,=0.0939 Wb。 主要对所述的效率优化方法进行了效率、谐波、电机动态响应等测试。
4.1 效率测试
在开关频率=20 kHz 的条件下,对常规SVPWM 调制策略与本文所提的效率优化控制方法进行了效率测试,其效率随负载变化曲线如图7 所示。 由图中可以看出,本文所提的效率优化策略可有效提高驱动器效率,特别是负载率大于25%时效率有明显提高,效率至多可提升1%。 文献[18-19]通过对外骨骼步态分析,对髋关节、膝关节等动力关节输出力矩曲线进行了详细分析,其中髋关节在支撑相和摆动相均需要较大输出力矩,因此髋关节电机处于负载率大于25%的时间可占80%以上;膝关节在支撑相也必须输出较大力矩来减小人体质心向下速度,因此膝关节电机处于负载率大于25%的时间也可达50%以上。由此得出使用本文所提的效率优化策略,可有效减小损耗,提高外骨骼的工作时长。
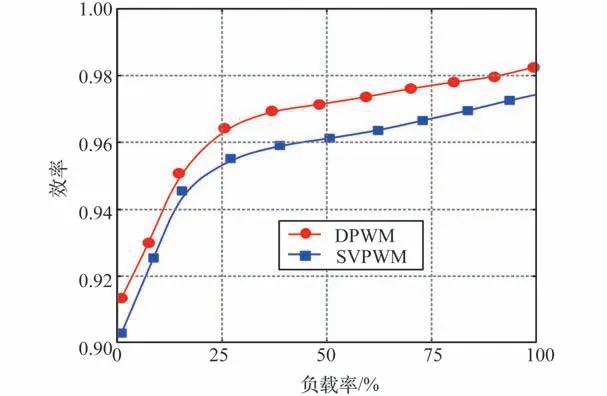
图7 不同调制策略效率测试Fig.7 Efficiency test under different modulation strategies
4.2 谐波分析对比
图8 为不同策略输出电流THD 对比图。 由于DPWM 策略是通过减小开关次数来降低开关损耗,但减小开关次数也会在一定程度上使谐波畸变的程度变大,文献[17]对DPWM 的谐波也进行了分析,结果表明在调制比大于0.88 时,二者谐波差距逐渐减小,并且为了有效利用母线电压,在设计三相逆变器时往往将其设计在高调制比范围内(M>0.8),因此DPWM 对谐波影响较小。 同时由于电机本身就是感性负载,对电流有滤波作用,因此二者THD 差别较小,如图8 所示。 因此DPWM 调制策略代替SVPWM 调制策略后,可以降低开关损耗,且其谐波畸变的负面效应与SVP⁃WM 策略相比不明显。
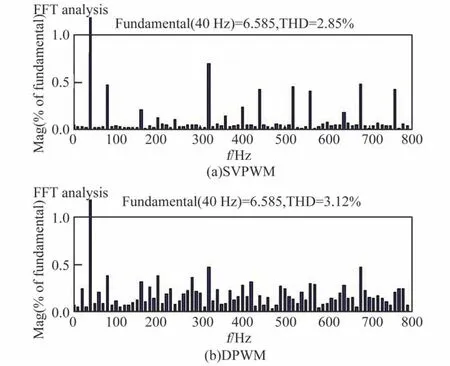
图8 不同调制策略输出电流THD 分析Fig. 8 THD analysis of output current under different modulation strategies
4.3 电机动态响应测试
本文对所提出的基于DPWM 的效率优化控制方法下的伺服电机动态响应进行了测试,图9为转矩阶跃给定响应,图10 为位置斜坡给定响应。 由图中可以看出,本文基于DPWM 效率优化方法所设计的伺服驱动系统具有良好的转矩响应以及位置跟踪精度。

图9 转矩阶跃响应Fig.9 Torque step response
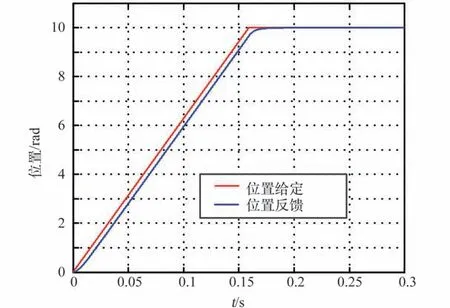
图10 位置斜坡给定响应Fig.10 Position slope response
5 结论
1)通过采用基于零序分量注入的方式,实现了归一化DPWM 调制策略生成方法。
2)对DPWM 的开关损耗进行了分析,其开关损耗随功率因数角变化,且开关损耗最多可减少为SVPWM 调制策略的1/2。
3)针对永磁同步电机负载,推导得出了永磁同步电机功率因数角的观测方法,从而提出根据功率因数角进行DPWM 的切换方法,来实现效率最优。 经实验验证,在重载条件下效率至多可提升1%,从而有效延长外骨骼的工作时长。
猜你喜欢
军事文摘(2024年6期)2024-02-29 09:59:38
小哥白尼(野生动物)(2021年12期)2021-03-29 01:15:34
防爆电机(2020年6期)2020-12-14 07:16:54
高师理科学刊(2020年2期)2020-11-26 06:01:16
测控技术(2018年9期)2018-11-25 07:44:22
光学精密工程(2016年3期)2016-11-07 09:03:49
电子制作(2016年1期)2016-11-07 08:43:01
通信电源技术(2016年5期)2016-03-22 01:09:45
发明与创新(2015年25期)2015-02-27 10:39:14
大电机技术(2015年5期)2015-02-27 08:22:28