基于机械反压航天服的人体手臂非延长线网络绘制方法研究
2022-04-27 07:27:36刘志鹏范金土傅白璐
载人航天 2022年2期
郑 嵘, 刘志鹏, 陈 晴, 范金土,3, 傅白璐, 杨 馨, 林 靖
(1.东华大学上海国际时尚科创中心, 上海 200051; 2.北服·爱慕人体工学研究中心, 北京 100029;3.香港理工大学纺织及服装学系, 香港 999077)
1 引言
随着出舱活动(Extra Vehicular Activity,EVA)任务不断由近地轨道向月球、火星及深空探测方向发展,理想的星际航天服应具备更小、更机动、更轻、适体、舒适、便于穿脱、满足长时间作业等特点。 机 械 反 压(Mechanical Counter Pressure,MCP)概念航天服因相对质量低、消耗少、机动性强、舒适性佳等特点,被认为是一种有可能替代全压防护机制,实现星际探测要求的潜力结构。
20 世纪60 年代,Iberall 最先将Becker 弹性力学中的应变椭球体原理应用在MCP 加压服的研究上,提出人体非延长线网络(Lines of No⁃ex⁃tension,LoNEs)约束层理论,即人体在运动中皮肤表面存在既不伸长也不缩短的网络,建议在身体表面覆盖一层模拟人体LoNEs 的网格状约束层,以此提供机械反压。 但受当时研究条件限制,仅定性描述了LoNEs,并未量化。 后续研究人员通过生物力学和人体测量研究发展了LoNEs理论,如Bethke 等利用三维激光扫描技术测量膝关节屈曲时腿部的表面积和体积,提出了一种定量测量皮肤应变场的映射技术来获得腿部LoNEs 的方法;Wessendorf 等利用动态捕捉系统测量了膝关节在蹲位运动中的皮肤应变,计算出该区域非张力线的局部方向;Domingues 等通过4 个红外摄像机和有限元软件研究了踝关节在屈曲-伸展和倒置-伸展过程中的皮肤应变数据,获得7 组非延长线;Obropta 等及Barrios等针对肩关节、肘关节和踝关节的动作静止状态,提出了使用多个立体相机实施3D⁃DIC(Three⁃Dimensional Digital Image Correlation) 高分辨测量皮肤应变场变化的方法。
在MCP 航天服样机研制方面,自Webb等于1968 年首次设计出基于MCP 原理的太空活动服(Space Activity Suit, SAS),如何通过弹性材料张力等方法在皮肤表面产生29.6 kPa的均匀压力,解决皮肤表面因加压不均所引起的人体生理异常反应,如皮肤肿胀、循环不良、呼吸能力下降等,改善穿脱耗时等问题始终是MCP 航天服设 计 面 临 的 巨 大 挑 战。 Webb 等指 出MCP 航天服的关键问题是如何使机械反压的压力作用更接近皮肤自然受力状态,并建议在生物力学分析的基础上通过提高剪裁精度和发展新型弹性材料来解决该问题。 Newman 等设计了BioSuit,发展了Iberall 提出的LoNEs 约束层理论,并沿体表非延长线采用高强度材料(如凯夫拉材料)来控制服装形态,在LoNEs 之间采用弹性材料(类氨纶织物等)产生机械反压。 为解决加压不均匀、穿脱困难等问题,Holschuh 等提出了弹性织物与形状记忆合金相结合的概念,即穿着BioSuit 后通过加热使形状记忆合金收缩,从而对人体施加机械反压。
自Iberall 提出LoNEs 网络约束层以来,New⁃man 团队在该领域做了有益探索,定量验证了LoNEs 在身体局部区域的分布,且正在逐步解决更精细的体表网格标记和数据采集精度的问题,但目前尚未获得准确的全身LoNEs 网络分布图,也未形成一套成熟的、有效连接皮肤应变与航天服结构以提供均匀机械反压的研究方法。同时,数据结果仅为少数个体数据,在单一个体的重复性实验和群体测量的可靠性方面还有待验证,无法明确动作静止状态和连续运动状态下的应变数据是否存在差异。
考虑到皮肤为各向异性,年龄、人种、形体特征和动作角度会在一定程度上影响皮肤的应力应变情况,本文拟结合人体测量数据、皮肤弹性与硬度测试,将关节活动范围较大的手臂作为研究对象,根据人体工学、运动生物力学、服装结构及材料的相关原理,选择18 ~24 岁男性志愿者,重点针对航天员登月典型动作状态下的皮肤应变展开研究,探讨基于MCP 航天服的人体手臂LoNEs网络的有效绘制方法,探索LoNEs 网络与皮肤延展伸缩之间的关系,为与袖片结构纸样的进一步衔接研究奠定基础。
2 人体测量
为了获得更有效的实验样本,参考军用标准,根据中国航天员的身高范围及主要人体尺寸,招募了70 名中码男性,身高为(175±2.5)cm,BMI(21.5±2.5)kg/m,18 ~24 周岁,身体无残疾,无大病史,使用三维扫描仪、二维Shapline 测量仪、马丁测量仪、Cutometer MPA 580 皮肤弹性测试仪、TECLOCK FO GS-744G 硬度计对身体尺寸和形态进行测量。 选取16 项人体手臂测量项进行数据采集,测量项目包括:人体基本体格测量项5项、手臂体表尺寸测量项7 项、人体手臂皮脂厚度测量项1 项、皮肤弹性测量项2 项和体表硬度测量项1 项。 按覆盖90%的置信区间,得到175 cm身高段男性各项测量项的均值,如表1 所示,以此为依据通过欧氏距离计算每一位志愿者的相关测量项目与其均值距离的总和,选择分数相对小的、距离均值中心近的5 名志愿者作为皮肤应变与LoNEs 网络实验的实验对象。
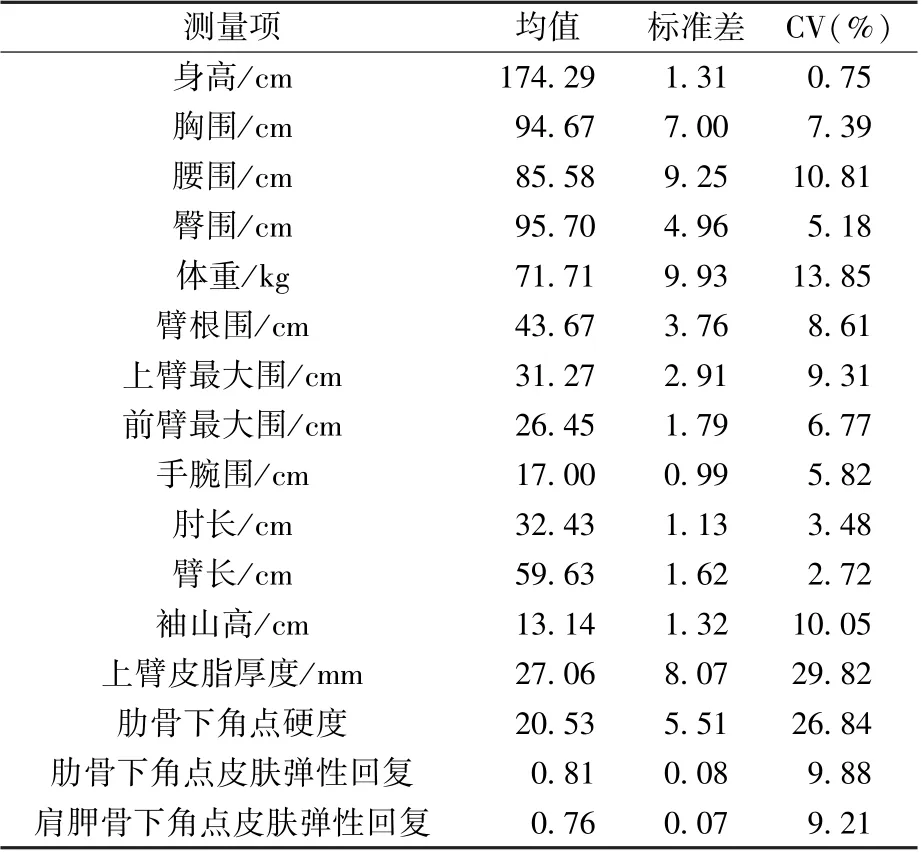
表1 70 名志愿者的手臂尺寸测量结果Table 1 Arm measurements of 70 volunteers
3 手臂皮肤表面应变网格研究
人体运动时,体表皮肤会发生不同程度的应变。 为更好地观察皮肤动作状态下的延展与伸缩变化,观察LoNEs 网络的分布可能性,在人体正常站立状态,手臂自然下垂时以肘突线为基准绘制皮肤表面网格线。 随手臂动作,网格标记线会发生变化,记录不同动作状态下手臂皮肤表面所绘制网格的变化,通过计算网格的线长和面积变化得到皮肤表面的应力变化情况,为LoNEs 网络的有效绘制奠定预实验基础。
3.1 实验过程
3.1.1 实验动作
结合肘关节、肩关节的活动范围和航天员登月的基本常用动作,设定实验的11 个动作(图1)。 用4 个数字表示动作状态,前2 位表示肩部活动角度:00 为肩外展0°,13 为肩外展30°,23 为肩屈曲30°;后2 位表示肘部活动角度:00、30、60、90、99 分别表示肘屈曲0°、30°、60°、90°和极限度。 由此,0000 表示手臂自然下垂状态;1390 表示肩外展30°,肘屈曲90°。 其中1390 为满足航天员登月活动要求的基本活动角度。

图1 测试动作关节活动角度说明Fig.1 Testing postures with different joint angles
3.1.2 体表实验网格绘制
考虑到手臂实验与未来袖片纸样设计的有效关联,在人体正常站立手臂自然下垂状态下,标记10 个基准点,包括腋窝点(a)、前腋点(b)、肩点(d)、后腋点(f)、沿臂根线取前腋点和肩点的中点(c)、沿臂根线取后腋点和肩点的中点(e)、肘突点、肘窝点、桡骨茎突点和尺骨茎突点。 横向标记线以肘位线为基准线,上下各3 cm 间隔画水平线,向上接近上臂最大围,向下接近手腕围;纵向线以a、b、c、d、e、f 为起始点,分别连接肘突点和肘窝点内外侧各三等分的点,以及桡骨茎突点和尺骨茎突点内外侧各三等分的点,共6 条;最后画每个格子的对角线,如图2 所示。
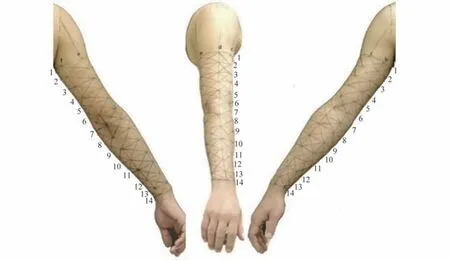
图2 手臂标记线示意图Fig.2 Map of arm marking lines
3.1.3 三维扫描及二维照相测量
体表实验网格绘制完成后,采用手持三维扫描仪扫描11 个实验动作,并使用二维Shapline 测量仪进行照相及轮廓测量。
3.2 实验结果与分析
基于3.1 节的手臂实验数据,进行如下分析:
1)将手臂三维扫描数据导入三维分析软件,测量11 个动作状态下应变网格中每个格子在横向、纵向、左斜、右斜4 个方向上的长度变化。
2)计算10 个动作(除动作0000 以外)下每个应变网格线的长度与0000 手臂自然下垂状态相比的伸缩率(Elongation, E)变化,以1390 为例,=[(-)]×100%。 根据长度伸缩率绘制得到如图3 所示1390 动作下手臂皮肤表面长度应变情况, 不同的伸缩率用不同的颜色表示。 其中越接近红色代表皮肤运动过程中拉伸越大,越接近深蓝色代表运动过程中收缩越大。

图3 1390 动作下手臂皮肤网格长度变化示意图Fig.3 Strain of the arm mesh under 1390 posture
3)针对手臂应变网格中的每一条线段,分别计算10 个动作状态与手臂自然下垂状态相比的长度伸缩率的变化情况,分析每条线段在10 个动作状态下的变化趋势,不同的分类用不同颜色表示(表2)。 如某条线段在做10 个动作时的伸缩率绝对值均在5%以内,表示该线段皮肤表面完全不变,用表中对应的绿色标注,依此绘制得到图4 所示的皮肤表面伸缩变化示意图。
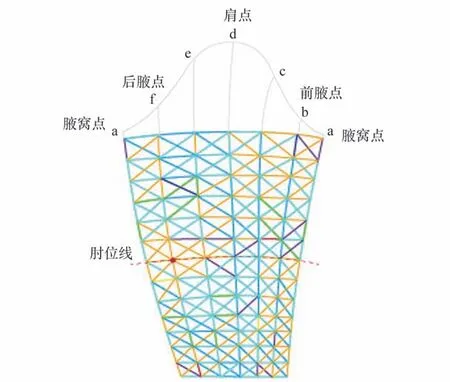
图4 手臂皮肤网格长度变化(10 个动作与静止叠加)Fig.4 Strain of the arm mesh under 10 postures as compared with static posture 0000

表2 皮肤应变网格线段长度变化率定义Table 2 Definition of change rate of line length in arm mesh strain
4)以满足航天员登月活动要求的基本活动角度动作1390 为参考,与手臂自然下垂状态0000 作对比,以三维扫描仪原点为参考,分别计算2 个动作状态下每个皮肤网格的4 个端点、对角线交点及相关区域体表点云数据的坐标点,由此计算每个网格上侧、下侧、左侧、右侧的面积伸缩率(图5),=[(-)]×100%;绘制得到1390 动作下手臂皮肤表面积的变化情况(图6),伸缩率用不同颜色表示,越接近红色代表皮肤运动过程中延展率越大,越接近深蓝色代表运动过程中收缩率越大。

图5 手臂皮肤网格面积测试区域示意图Fig.5 Proportion definition of each arm mesh
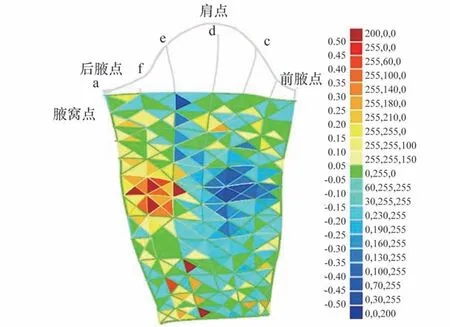
图6 手臂皮肤网格面积变化(1390 动作与静止叠加)Fig.6 Strain of the arm mesh under 1390 posture as compared with static posture
综上,通过分析人体三维扫描数据,得到手臂皮肤表面延展区域和非延展区域三维网格模型。通过此模型可以看出,人体胳膊肘关节处变化率最大,最大延展率达到55.94%;肘窝处收缩率最大,最高收缩率达到51.66%;绿色表示面积无伸缩或极小伸缩率,面积伸缩率在-5%~5%;肱二头肌和肱三头肌区域(格子主要为绿色、淡黄色和淡蓝色)变化相对较小,但有一定变化的区域。
4 手臂皮肤表面非延长线网络绘制研究
通过3.1 及3.2 节得到了手臂皮肤表面的应变数据,验证了人体表面确实存在非延展区域。在此基础上应用应变椭球体理论,寻找皮肤表面的实验标记圆(应变单圆)在运动过程中变为椭圆时共轭直径(非延长线)的存在状态及夹角的变化(图7),探索皮肤表面非延长线网络的有效绘制方法。
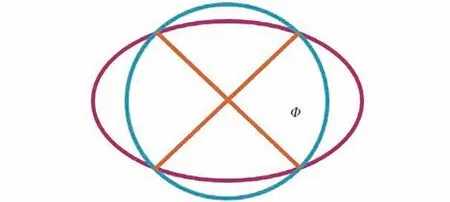
图7 共轭直径定义Fig.7 Definition of conjugate diameter
4.1 实验过程
4.1.1 非延长线绘制的起始区域确认
人体皮肤的延展率变化非常小或不发生变化时,应变单圆的形变量很小或不发生形变,很难准确寻找到2 条特定的共轭直径。 如果错误地绘制了共轭直径,就会影响人体非延长线的正确延展,因此找到合适的皮肤区域作为起始人体非延长线的绘制区域尤为关键。
为确定人体手臂非延长线的起始绘制区域,通过李少游研究可知:当物体受应变力作用发生形变时,衡量形变程度的量是通过应变来进行判断的。 从小的应变到大的应变,不仅仅反映量的变化,同时也体现物体性质的变化。 在大应变中,应变和应力的关系相对复杂,一般为非线性关系,不符合胡克定律,只有在小应变中,两者关系才为线性关系,符合胡克定律。
为了验证手臂各个区域在运动过程中,应变与应力之间是否符合线性规律,设计了以下实验:基于人体工学及解剖学,选取人体手臂的7 个区域,包括袖山、肱二头肌、肱三头肌、肘点周围、肘窝周围、腕曲肌群和腕伸肌群作为理论验证区域。 实验过程如下:①志愿者手臂保持自然下垂状态,分别在上述区域内绘制一个直径为3 cm 的单圆;②志愿者手臂保持极限运动姿势不动,观察圆的共轭直径夹角(图7)的变化;③通过二维图像记录结果(表3)。
通过分析比较表3 中不同区域共轭直径的夹角可知,袖山区域、肱二头肌区域、肱三头肌区域、碗屈肌群区域和腕伸肌群区域属于手臂小应变区域,应力应变关系符合胡克定律,且为线性关系,通过手臂运动,可以找到应变单圆的共轭直径;肘点和肘窝区域属于手臂大应变区域,应力应变关系不符合胡克定律,且为非线性关系,通过手臂运动,找不到应变单圆的2 条共轭直径。 所以在绘制人体手臂非延长线时,不能将肘点和肘窝附近区域作为绘制人体手臂非延长线的起始区域。

表3 手臂各部位共轭直径角度Φ 的变化Table 3 Changes of conjugate diameter Φ at different areas of the arm
排除皮肤延展率变化极大区域对于绘制人体手臂非延长线的干扰,在剩下的区域中,确定皮肤延展率变化相对较大的区域——上臂肱二头肌和肱三头肌区域作为绘制人体手臂非延长线的起始区域。
4.1.2 四方连续应变模块绘制方法
在Iberall 的实验中,应变单圆处于相对离散的状态(图8),可以看到趋势,但并未形成有效、准确的非延长线网络。 在点对点(图9 中的粉红色圆)的绘制方法基础上,本文设计了四方连续的绘制方法,以确保人体手臂非延长线的准确性和连贯性,具体绘制方法如下:①5 名志愿者手臂保持自然下垂状态,用3D 打印的印戳蘸取适量颜料,绘制两两相切且直径为3 cm 的应变单圆,布满整个手臂上肢,如图9 中粉红色的圆所示;②在第一层应变单圆两两相切的空隙处,再绘制一层应变单圆(图9 中淡蓝色的圆),此时应变单圆的排列方式近似于四方连续的排列方式,最终完成应变模块的建立(图10)。 此绘制方法的目的是让手臂皮肤所有区域都覆盖单位应变模块,从而尽可能找到手臂皮肤上连贯的非延长线。
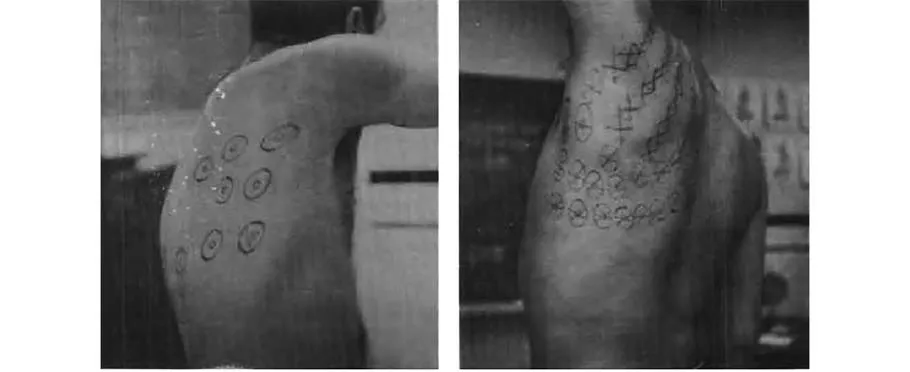
图8 Iberall 非延长线网络示意图[9]Fig.8 Iberall experiment of LoNEs[9]
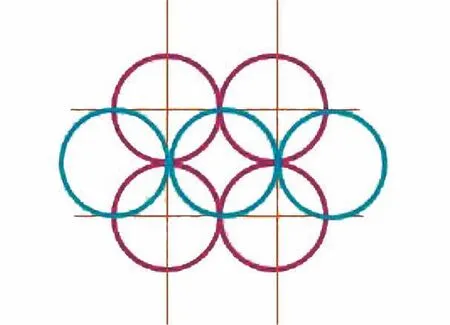
图9 应变单圆建立示意图Fig.9 Diagram for establishing strain circles

图10 手臂应变模块绘制完成图Fig.10 Finished drawings of the arm strain module
4.1.3 共轭直径与非延长线的绘制
结合四方连续绘制方法,在手臂自然下垂状态下追加5 条基准参考线:横向为肘位线;纵向以肩点、腋窝点、前腋点、后腋点、肘突点、肘窝点、桡骨茎突点和尺骨茎突点为基准点,绘制4 条纵向线。 在1390 动作下找到每个圆的2 条共轭直径(图11),将所有共轭直径通过点对点的方式连成线,经过圆顺初步得到一系列的非延长线,共5条,如图12 所示。 使用不同颜色的无弹性标记带标记初步得到的非延长线,让肩关节和肘部屈曲不同的角度,如果标记带不能保持不变,调整标记带的位置,最终使所有标记带在不同屈曲角度下均保持不变,从而获得手臂的非延长线,如图13所示。 非延展线网络绘制完成后,使用手持扫描仪对肘关节相关基本活动姿态进行扫描,并通过Shapeline 拍照计测。

图11 共轭直径绘制完成效果Fig.11 Finished drawings of arm conjugate diameters

图12 1390 动作下的非延长线网络Fig. 12 Arm LoNEs under 1390 posture

图13 非延长线网络动作验证Fig.13 Verification of LoNEs under different postures
4.2 结果与分析
采用上述方法完成了5 名测试者手臂非延长线网络的绘制(图14)。 由于5 名测试者的人体尺寸(表4)相对更接近70 名志愿者的平均值,从表4 与表1 中变异系数(CV)一列的比较来看,除身高一项,针对其他测量项,表4 的CV 远远小于表1,可理解为5 名测试者的人体尺寸数据是相对接近的。 从图14 手臂非延长线网络的完成效果来看,5 名测试者围绕肌肉、关节的分布趋势是一致的,但因手臂个体形态的差异,三维数据比对显示5 套手臂非延长线网络存在一定的差异,并非一一对应,从机械反压袖片的设计来看更适合针对个体单量单裁。 在未来的研究中,将尝试通过Morphing 等手段建立身高(175±2.5)cm、BMI(21.5±2.5)kg/m组的代表性手臂与非延长线网络,探讨群体机械反压袖片设计的可能性。

图14 5 名测试者手臂非延长线网络图Fig.14 Arm LoNEs of 5 volunteers

表4 5 名测试者的手臂尺寸测量结果Table 4 Arm measurements in 5 volunteers
为进一步分析在获得人体手臂非延长线网络、皮肤表面应变网格数据的基础上,是否存在有效连接人体手臂皮肤应变与航天服袖片结构设计,以提供均匀机械反压的途径,本研究基于人体测量数据最接近表1 平均值的1 名志愿者的三维扫描数据,叠加5 名志愿者皮肤表面网格的面积变化,通过三维扫描数据和逆向工程软件对1390动作状态下的手臂皮肤表面应变网格、表面积变化和非延长线网络进行叠加建模,结果如图15 所示。
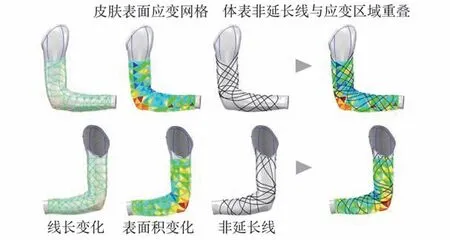
图15 1390 动作下手臂非延长线网络与皮肤应变重合图Fig.15 Overlapping map of arm LoNEs and skin strain under 1390 posture
在此基础上通过三维数据雕刻、和纸拓板、和纸展板等服装CAD 设计手段,获得0000 和1390动作下含有非延长线和皮肤应变网格的手臂动、静态二维基础板(图16),该基础板为不含缩放的100%手臂平面展开纸样(袖片原型)。 其中,非延长线网络在0000 和1390 动作下的基础板如图16(a)、(b)所示,其长度保持不变,皮肤表面的每一个网格从图16(c)的静止状态到图16(d)的1390 动作状态,包含了皮肤表面的应变及关节活动带来的网格面积变化。
机械反压航天服的设计过程中需要在人体皮肤表面产生均匀、一致的机械反压,在未来研究中,拟通过Laplace 方程结合人体分区域压缩因子(即本文研究中获得的皮肤表面伸缩应变数据),结合面料的弹性模量与层数,分区域计算图16 中网格的缩率,获得满足1390 动作状态下的袖子分区域缩率纸样,并通过智能针织结构设计探索皮肤表面均匀施压问题的科学解决方案。
通过分析可知:人体在运动过程中,皮肤表面存在着相对既不伸长也不缩短的部分,即非延长线网络(见图15 中黑色曲线)。 在未来星际航天服的压力防护设计中,图15 的手臂三维模型可对应展成包含皮肤表面应变信息的二维袖片纸样(图16);可采用高强度材料沿着非延长线分布,以控制服装形态;在非延长线之间根据皮肤应变情况采用可产生机械反压作用的不同弹性材料,探索通过非延长线的形态控制和弹性材料的相互作用,实现对人体皮肤表面施加相对均匀、一致的机械反压的可能性。

图16 手臂1390/0000 动静态展开基础纸样-100%缩率Fig.16 100% basic patterns of arms under 0000 &1390 postures
本文研究中,受时间、样本量、实验量、研究手段等的限制,现阶段尚未进行身高(175±2.5)cm、BMI(21.5±2.5)kg/m组的代表性手臂与非延长线网络归一可能性的探讨实验,以及不同动作引起肌肉变形对网格绘制结果是否会造成一定影响的综合对比实验。 在下一阶段的研究中,拟通过三维动态扫描仪针对不同动作对皮肤应变网格绘制的影响展开深入研究,并结合面料弹性模量与均匀施压机械反压航天服袖子的设计研究一一开展。
5 结论
1)明确了人体手臂应变模块绘制方法、手臂非延长线起始绘制区域和绘制LoNEs 网络的动作姿态是影响人体手臂非延长线网络绘制准确性的三大因素。
2)以人体手臂皮肤表面的微小应变区域作为非延长线的起始绘制区域,以四方连续应变模块作为非延长线网络绘制方法,以满足航天员登月活动要求的基本活动角度作为共轭直径的初始状态,并通过极限动作进行验证,可有效提升人体手臂非延长线网络绘制的准确性。
3)手臂体表非延长线网络与皮肤应变叠加形成的三维模型可为多材料复合MCP 航天服袖子均匀加压模型的设计方案提供参考依据。
4)未来的研究工作将探讨手臂应变模型与航天服袖片结构设计的具体关联,研究如何通过对LoNEs 网络的控制和航天服弹性材料分区域的作用,实现在人体皮肤表面产生均匀、一致的机械反压。
猜你喜欢
疯狂英语·新悦读(2023年9期)2023-12-02 17:36:34
科学家(2021年24期)2021-04-25 12:55:27
今日农业(2020年14期)2020-12-14 19:47:34
初中生学习指导·中考版(2020年4期)2020-09-10 07:22:44
童话世界(2018年17期)2018-07-30 01:52:02
金色少年(奇趣科普)(2016年8期)2016-09-21 02:07:58
我爱学(创意美术与手工)(2016年4期)2016-07-14 06:34:54
少儿科学周刊·少年版(2015年4期)2015-07-07 22:02:23
中国卫生(2014年9期)2014-11-12 13:02:00
语数外学习·上旬(2013年2期)2013-03-13 07:20:42