基于特征分割识别的点云配准*
2022-04-26 11:08卢文翔熊瑞平徐毅松
组合机床与自动化加工技术 2022年4期
卢文翔,熊瑞平,徐毅松,杨 康,李 华
(四川大学机械工程学院,成都 610065)
0 引言
3D扫描仪用于捕获现实世界物体的外形,用以在实际生产上生成3D仿真模型,在制造领域广泛用于反求工程。摄像头的成像局限性,形成完整3D模型的过程通常需要基于物理对象多个观察角获取对应的3D数据(以点云的形式)。每个视图以从特定方向覆盖对象以捕获整个对象,对齐这些视图以产生一个合并的点云,然后可以将其重构为3D表面,对齐的过程称为点云的配准[1]。目前国内外研究人员已经取得多种成果,BESL等[2]提出了最近点迭代(iterative closest point,ICP)算法以及基于ICP算法优化的ICP衍生算法[3-6],REN等[7]提出一种基于新的距离误差度量优化ICP算法,在减少选取点对的错误率的同时提升了配准收敛速度,HATTAB等[8]提出通过手动选择特征平面进行对应粗配准减少ICP迭代次数,优化了ICP在制造业中的应用,LI等[9]提出通过使用Kd-tree优化数据的存储和搜索方式,进一步在ICP迭代过程中优化寻找配准点对和配准时间,提高效率。
目前制造加工中,工件由于尺寸差异大,难以通过一次连续的扫描去获取完整的工件三维点云模型,于是对多个视角扫描获取点云再进行点云配准是解决工件识别的重要方式但是点云配准并不容易,特别是对于制造加工工件,其尺寸形状差别较大,点云数据量大,计算难度高,处理效率慢,精度要求高。
但是制造加工零件由于加工工艺(车铣刨磨)得到的加工面大多形成的为圆柱面、圆锥面与平面,所以机械模型外形可被看作是一系列平面与特征曲面的结合。将点云配准的对象设置为配准点云与待配准点云,本文提出一种配准方法,首先通过基于各个面的形状特征将其分离分割,并进行形状归类,对同种形状的子点云集基于其法线特征转化为同形状的子法线点云,并获得其最佳对齐方式,完成点云粗配准再应用ICP最近点迭代进行精配准。
1 基于特征面几何特性的分割算法-配准预处理
该算法通过比较点云相邻点特征参数例如法线之间角度,将满足平滑约束的连续相邻点输出,并通过基于KD-Tree最近邻搜索应用欧式聚类设定欧式距离条件筛选出满足某一形状特征的子点云。
1.1 估计点云的法线
待配准点云集Q{qi,1≤i≤n}与源点云集P{pi,1≤i≤n}是基于同一工业外壳的不同角度点云集。基于离散点云数据估计三维空间点云表面法线,使用三维数据拟合二维小平面,将三维点云法线求解转化为该点局部相邻点云的最小二乘法平面拟合问题,小平面的法线便是该点法线。本文主要使用主成分分析方法(principal components analysis,PCA)来完成[10],来获取两点云集的法线与曲率。
1.2 通过区域生长算法第一次分割点云集
区域生长聚类算法本质上是同类点云的分割,本文将法线与曲率作为分割的参考系数,将表面法向量与曲率相似的局部点云簇合并成同一类以点云索引为印记保存为同一子点云,最后得到带点云索引indices的子点云集。运用区域生长算法对点云集进行处理的核心是:在每一次聚类循环进行聚类预处理,基于点云各点由步骤1计算得到的曲率开始排序,选择曲率最小的点作为初始种子点开始生长,选择曲率最小的点作为初始种子点的意义在于曲率最小处能够保证该局部的平滑,能够减少分割区域的总数,提高聚类效率。
点云索引indices伪代码如表1所示。

表1 区域生长算法伪代码
1.3 基于条件欧式距离与采样一致性的混合聚类算法
该混合算法本质上也是一种区域生长算法,但是其聚类判断标准是点之间的欧几里得距离与其他能够自行定义的条件,在聚类表现上更加灵活。对算法同样通过设置初始种子点q,利用Kd-Tree邻近点搜索k个距离q最近的点,基于特征匹配判断标准决定是否聚类于目前特征点集,随着种子点完全遍历即输入点云完全经过聚类,产生一系列特定形状的子点云比如平面子点云、柱面子点云,完成子点云集的筛选分类。
进行特征匹配判断,基于子点云中点的形状特征与所需匹配面的特性进行比对,验证子点云是否为预设的形状模型,从而进行聚类分割,转化为待配准特征子点云集与源特征子点云集。
预设识别模型为平面,基于条件欧式距离即通过对子点云中每个点与邻域点的法线向量夹角与算法中预设偏差阈值进行比较验证,可以识别该子点云是否满足平面子点云,满足则保存至平面子点云集中方面后续操作,不满足加入剩余子点云集;如果该子点云部分符合预设平面模型,则通过判断符合模型部分点数与总点数比较,满足预设聚类点数条件,则将该部分点云聚类保存为一新子点云到平面子点云集,剩余点聚类保存为一子点云至剩余子点云集。
预设识别模型为圆柱面,只需更改算法中的评判依据为采样一致性算法中的圆柱体模型作为评判依据[11],进一步进行遍历,直到全部子点云完成特征匹配,不满足任一预设模型的子点云删除。
伪代码如表2所示。
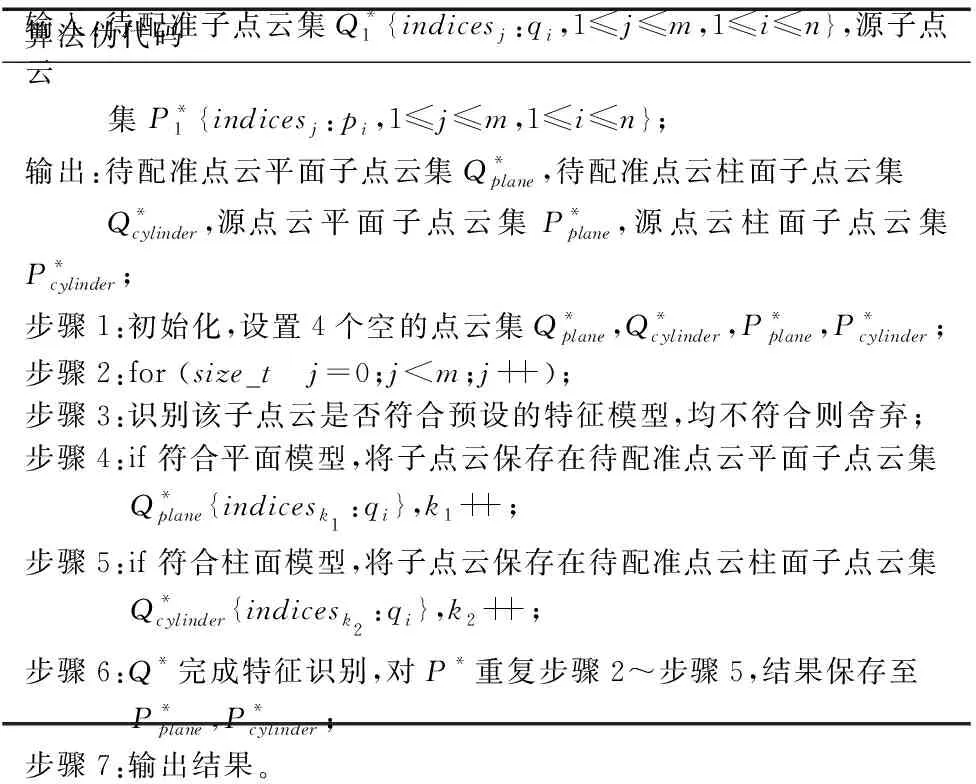
表2 混合聚类识别算法伪代码
2 基于特征分割识别的点云配准
传统ICP粗配准中的选择多个特征点对(特征点对指两个需完成配准的三维点云模型中拥有特殊标志的一对点,例如法线曲线突变的特征点以及存在于点云边界,常用手动的方式进行选择)进行初始的点云粗配准,由于筛选的基数过大,计算量非常大,造成匹配时间很长且通常配准精度不高。为了达到最后的配准效果,精配准ICP过程需要更大的迭代次数才能够达到要求的配准进度从而收敛。
本文的配准算法通过优化原本的ICP配准的粗配准过程,通过选择两个需配准点云的特征面的法线作为特征法线对,在多个特征法线对的基础上,去进行点云的特征配准,求得变换矩阵。在以法线作为配准基础上,点云的粗配准能够得到比较好的效果且为ICP精配准提高效率。本文优化传统粗配准特征点对配准中始终对于大数据量的点云进行变换的方式,通过求取法线与坐标系单位球的交点将多个特征法线对抽象成两个法线特征点云,再对法线点云应用奇异值分解法(singular value decomposition,SVD)解出法线之间的变换矩阵,再应用ICP的验证矩阵进行优化迭代,法线点云数量较少,从而达到较好的粗配准效果。
该算法通过输入两个基于不同视角的同一物体点云,输出一个刚体变换矩阵,通过前文预处理的分割处理,基于特征进行配准,进一步得到待配准点云与源点云的粗糙变换矩阵-旋转矩阵与平移矩阵,再通过最近点迭代的方式进行精配准,得到最终结果。
步骤1:基于特征面几何特性的分割算法-配准预处理。
步骤2:获取最优的旋转矩阵。

(1)
(2)

求解P2、Q2配准的旋转矩阵R与位移向量T,定义Q2经旋转位移变换之后的点云与P2之间N对最近点之间距离f(R,T)为:
(3)
运用奇异值分解的方法求解得法线点云最优的旋转矩阵R,平移矩阵T。用待配准点云Q应用R,T进行矩阵变换得到变换后的旋转变换点云Q′[12]。
步骤3:获取最优的平移矩阵。

(4)
最优的平移矩阵即为:
T′=p-q′
(5)
步骤4: ICP精配准。
通过上文所求的最优旋转平移矩阵,完成待配准点云Q与源点云P的粗配准,应用文献[2]中的ICP配准方法对Q″与P进行迭代完成精配准。
3 仿真分析
本文采用基于开源软件cloudcompare开发的软件进行实验。通过加载工业实际零件(最大方向长度约9 m)的点云模型,经处理得到的不同视角的源点云及待配准点云进行仿真实验得到如图1a所示的实验过程,红色为源点云,白色为待配准点云。图1b为经由上文方法配准预处理得到的两点云的分割处理结果,不同颜色代表不同的分割点云面,经由特征提取得到两法线点云如图1c所示,求解法线点云的变换矩阵完成如图1d所示的法线点云配准。带入法线点云的变换矩阵作为源点云与待配准点云的旋转矩阵完成粗配准旋转变换如图1e所示,计算平移矩阵完成粗配准平移变换如图1f所示,最后使用ICP配准实现ICP精配准如图1g所示,完成点云配准过程。

(a) 原始点云状态 (b) 点云分割状态 (c) 法线点云配准前 (d) 法线点云配准后

(e) 粗配准旋转变换 (f) 粗配准平移变换 (g) ICP配准
点云ICP配准过程如图2所示,点云配准结果如表3所示。

表3 本文算法与经典ICP算法比较

(a) 原始点云 (b) ICP迭代5次 (c) ICP迭代10次 (d) ICP迭代15次

(e) ICP迭代 20次 (f) ICP迭代 30次 (g) ICP迭代 50次 (h) ICP迭代 70次
在针对工业应用中含有较多平面、柱面的零件,本文的基于特征分割识别的点云配准算法有着更好的精度。这是由于在粗配准处理中本文通过聚类分割出点云特征并识别点云特征面并基于其法线进行配准,得到较好的粗配准效果,减少精配准迭代工作量。
4 结束语
本文提出了一种适用于工业加工零件的一种基于特征分割识别的点云配准方法,通过配准预处理分割出源点云和待配准点云的各个基础特征面(平面,圆柱等)提取其特征(法线、轴线)转化为法线点云进行配准得到粗配准旋转矩阵,代入源点云和待配准点云后求其平移矩阵,变换后完成粗配准,使用ICP方法完成精配准,获取变换方案。在配准过程中,通过少量数据的法线点云代替冗杂的完整点云粗配准或者手动选点配准大量节约粗配准时间,增加效率,通过RANSAC特征提取的特征信息与单位球求解法线点云减少了由对称形状带来的旋转错误,基于重心比对更正一定平移错误实现效率较高的粗配准。该算法的效率较高、误差较小,能够满足每分钟1~2个工件的喷涂节拍要求,并可用于喷涂路径优化,满足生产需要。不过由于本文方法依赖于特征面,可用特征面较少或者重合比例较高的点云,在法线点云生成时会产生大量重合点,使得某个点云特征方向对配准效果影响较大,从而导致最后配准结果不理想。
猜你喜欢
装备制造技术(2022年5期)2022-09-06
今日重庆(2021年8期)2021-10-12
金秋(2020年16期)2020-12-09
今日农业(2020年18期)2020-10-27
数学教学通讯·高中版(2018年11期)2018-01-15
艺术科技(2017年1期)2017-04-05
中国经济周刊(2016年34期)2016-09-02
人民教育(2016年18期)2016-07-17
小学教学参考(语文)(2016年3期)2016-03-23
大众文艺(2016年23期)2016-03-02