
多柔性附件卫星热致振动特性研究
2022-04-26 12:56陈夜王开浚沈海军张雷霆彭海阔
航天器工程 2022年2期
陈夜 王开浚 沈海军 张雷霆 彭海阔
(上海卫星工程研究所,上海 201109)
由于质量轻、收纳比高的优势,大柔性可展开结构已广泛应用于各类卫星[1-2],以实现高分辨率对地观测、大容量通信等任务目标。大尺寸伸展臂、蜂窝板以及薄膜结构是卫星上常见的柔性附件,对温度变化、微振动等环境因素敏感度高,容易发生在轨振动。绝大多数卫星在轨运行时会周期性地出入地影区,期间卫星外热流发生突变,导致星上温度的迅速变化,诱发柔性附件乃至整星的振动,即热致振动,影响卫星的姿态精度与稳定性,为有效载荷的工作性能带来不利因素。
公开文献可查由星上大柔性附件引发的航天器热致振动事故,有地球物理观测卫星-4(OGO-IV)[3]、哈勃太空望远镜(HST)[4]、尤里塞斯(Ulysses)航天器[5]等。其中以哈勃太空望远镜最为典型,周期性的瞬间温差变化使太阳电池阵反复热胀冷缩,激起了太阳电池阵的共振,引发指向控制系统的扰动,导致传回的图像模糊失效。
对航天器热致振动机理的研究始于20世纪50年代,Boley首次提出了热致振动的概念[6],并定义了Boley参数[7]用来判断结构是否会发生热致振动。哈勃望远镜的热致振动引起了很多航天学者的关注,文献[8]利用梁模型分析了望远镜热致振动的机理,并得出了弯曲振动稳定性的判据。进入21世纪,随着有限元方法的发展与计算机能力的提升,多数学者采用数值方法[9]进行热致动力学分析,文献[10-11]提出了傅里叶温度单元,可高效地用于瞬态热-结构动力学的计算。文献[12]对空间桁架、文献[13]对环形桁架天线等结构的热致振动特性进行了仿真分析,为结构优化设计提出了方向。
上述研究深入分析了热致振动的产生机理,实现了典型空间柔性附件的热致振动分析计算。对于搭载多柔性附件的卫星,柔性附件的振动相互牵连,单一附件的振动分析已不能反映真实的振动特性,本文通过热致动力学建模,对整星级的热致振动进行分析。
1 热致振动有限元建模
1.1 热弹性力学基本方程
温度变化引起的力学问题属于热弹性力学范围,故在线弹性范围内的连续性假设、均匀性假设、各向同性假设、完全弹性假设、小变形假设依然成立,平衡方程、几何方程与一般弹性力学的方程完全相同[14],但从物理学角度,由于膨胀或冷缩仅产生线应变,剪切应变为零,故其物理基本方程为
σ=Dε-Dε0
(1)
式中:σ是单元应力列向量;ε是单元应变列向量;D为弹性常数矩阵;ε0为单元温度应变量。对各向同性材料,其表达式为
(2)
式中:α为线性膨胀系数;ΔT为温度变化量。
1.2 热弹性单元动力学方程
随着计算机技术的发展,有限元方法已广泛应用于航天领域的动力学分析,将结构离散为弹性单元,基于单元构建整星的动力学方程。
根据有限元理论,单元内的位移场u、应变场ε可由出口节点位移ue表示,即
u=Nue,ε=Bue
(3)
式中:N为型函数;B为应变-位移转换矩阵;e为单元编号。
假设单元除承受体积力FV、表面力FS、集中载荷P的作用外,还发生了热应变ε0,则根据虚功原理可推导出热弹性单元的动力学微分方程为
(4)
式中:Me、Ce、Ke、re分别为单元质量阵、阻尼阵、刚度阵、节点力列阵,其表达式如下。
(5)
式中:ρ为单元材料密度;c为阻尼系数。
相比于恒温条件下的单元动力学微分方程,式(4)增加了热载荷项rTe,rTe通过单元体积内积分得到
(6)
1.3 整星级热致动力学方程
式(3)中的动力学微分方程是在单元局部坐标系下描述,需要将各单元的动力学方程统一到整星坐标系下。用下标a、b分别表示整星坐标系和局部坐标系,假设局部系{eb}到整星系{ea}的转换矩阵为T,热弹性单元的出口节点位移在整星系下表示为
(7)
则整星坐标系下的单元矩阵为
(8)

(9)
整星级热致动力学微分方程可表示为
(10)
式中:x为整星的n×1维广义位移列阵;M、C、K分别为整星的n×n维质量矩阵、阻尼矩阵、刚度矩阵;r、rT分别为整星的外激励与热载荷矩阵。
热致振动分析的特殊之处在于,需要根据外热流条件或温度条件计算热载荷矩阵rT,对于时域上无法用解析式描述的温度场,只能用数值方法求解式(7),且数值积分的时间步长要足够小,以充分描述温度的变化。ABAQUS软件的隐式动力学模块[15]能够将动态、离散的温度载荷条件映射到有限元模型,将时间历程离散为微小的时间步,通过数值积分,实现热致动力学方程的求解。
1.4 振动响应的解耦分析
对于多柔体卫星,温度变化可以同时引发多个柔性附件的振动,振动通过卫星本体的传递,相互耦合叠加,表现出更加复杂时域特性。因此,除得到卫星的热致振动响应外,还希望辨识振动的源头,为振动抑制方案的制定提供方向。
依据模态叠加与模态截断[16]原理,柔性结构的振动主要由低阶模态分量组成,即位移x可表示为m个正交主振型的线性组合
(11)
式中:ξi为模态坐标;φi为第i阶模态振型。
通过快速傅里叶变换将位移的时域响应x(t)变换到频域x(w),则有
(12)
模态坐标ξi(w)在其对应的固有频率wi处存在明显的峰值,所以x(w)在固有频率w1,w2,…,wm附近会出现大小不等的峰值,据此可识别热致振动的频率组成。而各阶固有频率一般对应一个主振附件,由此可以辨别振动的主要源头,实现振动的解耦分析。
2 应用实例
2.1 卫星特点
以某遥感卫星为例开展分析,卫星上搭载了太阳翼、伸展臂、抛物面天线等多个大柔性附件,如图1所示。发射状态下,柔性附件以折叠方式收拢,入轨后展开,伸展臂、抛物面天线的长度均达到10 m以上。柔性附件降低了整星在轨状态的固有频率,使得卫星具有复杂的动力学特性。

图1 卫星在轨展开状态
高精度平面阵天线是卫星搭载的主要载荷之一,位置稳定度是保证该天线性能的关键因素。天线悬挂于柔性伸展臂的末端,伸展臂与卫星本体间采用柔性连接的方式,容易在温度环境扰动下发生振动。而柔性结构的振动衰减缓慢,持续扰动将影响天线的正常工作,因此在卫星设计与论证中必须开展相关的分析与评价。
通过初步动力学分析,卫星本体的固有频率在10 Hz以上,远大于柔性附件,卫星可视为一个中心刚体与多个柔性附件的组合结构。卫星在轨状态下,某个柔性附件发生振动后,扰动力将传递给卫星本体。由于角动量守恒,卫星本体与其他附件也将发生牵连振动。因此,柔性附件上的热致振动由以下两种因素叠加而来:
(1)柔性附件上温度突变引发的附件自身振动;
(2)其他附件热致振动经卫星本体传递来的扰动。
2.2 动态温度场
通过建立卫星热分析有限元模型,综合考虑轨道环境热辐射、卫星表面辐射、热载荷等因素,得到一个轨道周期(约6100 s)内卫星在各个时刻的温度场。选取均匀分布在太阳翼、抛物面天线、伸展臂上的节点,输出温度变化曲线如图2所示。

图2 一个轨道周期的温度变化曲线
第2400 s与第3400 s是卫星进、出地影时刻,太阳翼、抛物面天线的温度在这个时间段内变化尤为剧烈。为突出进、出地影期间温度变化的影响,截取2400~4000 s时间段的温度场作为后续分析的热载荷条件。
2.3 卫星在轨模态
模态分析是结构动力学分析的基础,也是振动响应解耦分析的主要依据。因此,在建立卫星的结构分析有限元模型后,首先开展模态分析,边界条件为自由边界,模拟卫星在轨运行状态。过滤掉6阶刚体模态,卫星的弹性模态如表1所示。
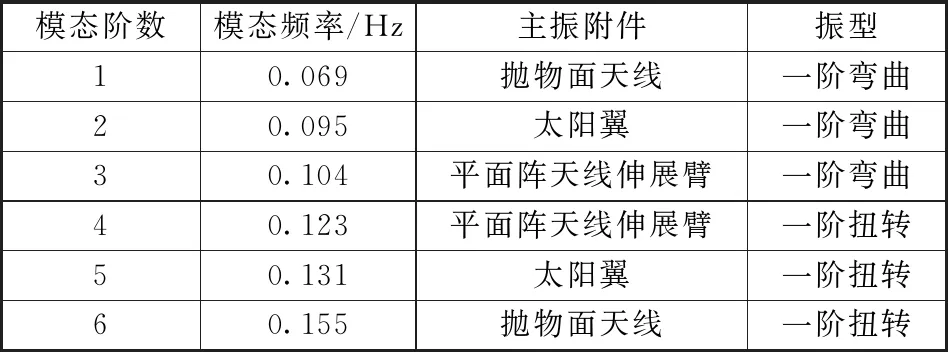
表1 卫星在轨模态
柔性附件的存在使得卫星在低频段模态密集,卫星一阶固有频率为0.069 Hz。
2.4 热致振动分析
基于ABAQUS软件的隐式动力学模块开展时域动力学分析。分析时间范围为0~3000 s,其中第0~1600 s加载进、出地影时间段内(图2中2400~4000 s)的温度场,第1600~3000 s温度场保持恒定,研究热致振动的产生以及衰减规律。
分析发现柔性附件角点上的变形与振动最为明显,以角点上的位移表征附件的振动特性,得到太阳翼、抛物面天线、平面阵天线的位移时域响应曲线如图3所示。
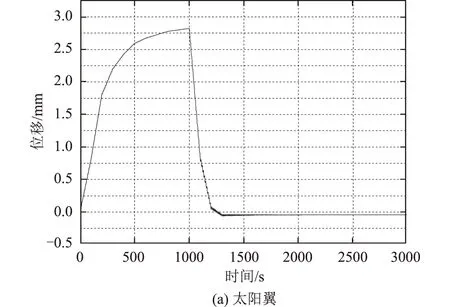
图3 柔性附件位移时域响应曲线
位移时域曲线呈现准静态分量占主导的特征。从振动量级上,热致振动幅值明显小于准静态变形量;从振动时间上,热致振动随着准静态变形的突变而产生,并随着准静态变形的稳定而衰减。在图3中,1000 s后的热致振动效应较为明显,是由于第1000 s为卫星出地影时刻,星上温度在此刻由降转升。自1300 s开始,由于温度变化趋缓,柔性附件的准静态变形逐渐保持稳态,振动缓慢衰减。截取各附件的位移稳态衰减曲线,如图4所示。
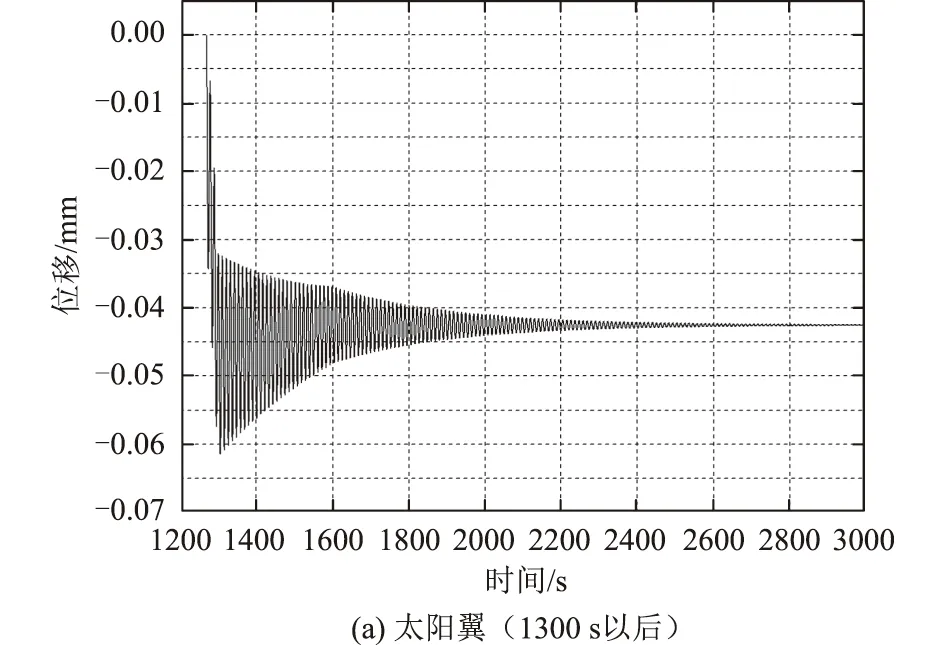
图4 稳态振动曲线
由图4可见,太阳翼、抛物面天线的振动曲线接近正弦衰减振动,说明振动的频率组成较为单一,而平面阵天线的振动曲线比较复杂,是多种频率振动叠加的结果。
从振幅角度,太阳翼与抛物面天线的最大振幅约为30 μm,平面阵天线振幅小一个量级,约为3 μm。在时间历程上,当准静态位移达到稳态后,各柔性附件的振动幅值在800 s后均衰减了90%以上。
2.5 振动源辨识
为辨识热致振动的主要频率组成,首先对图4的振动曲线进行快速傅里叶变换。考虑到柔性结构的固有频率普遍在1 Hz以内,快速傅里叶变换的采样频率定为2.5 Hz,变换后的有效频域范围为0~1.25 Hz。热致振动的频域曲线如图5所示。
依据图5各柔性附件振动的频域曲线在0.069 Hz处均存在明显的峰值,即存在0.069 Hz的振动分量,对应抛物面天线的一阶弯曲模态。可见抛物面天线的弯曲振动引起了整星的牵连振动,是卫星热致振动的主要源头。

图5 热致振动频域曲线
对于有高稳定性要求的平面阵天线,其振动频域曲线还存在0.104 Hz、0.123 Hz两处峰值,对应伸展臂的弯曲与扭转模态。因此,若需进一步提高平面阵天线的稳定性,一方面要通过温度控制、提升固有频率等手段降低伸展臂的热致振动效应,另一方面还应通过隔振措施减弱抛物面天线振动的传递。
3 结论
通过整星级的热致动力学建模,并结合应用实例,得出以下结论:
(1)对于搭载有柔性附件的卫星,尤其在附件固有频率小于0.2 Hz的情况下,卫星的设计论证阶段应考虑热致振动效应的影响;
(2)对于搭载多个柔性附件的卫星,分析热致振动对关键载荷的影响时,应考虑振动的传递与叠加效应,并通过解耦分析识别主振附件;
(3)相关研究内容可为多柔性附件卫星的振动抑制设计提供方向,提高卫星在轨运行期间的稳定性。
猜你喜欢
空气动力学学报(2022年4期)2022-08-23
汽车实用技术(2022年10期)2022-06-09
汽车实用技术(2022年9期)2022-05-20
成长·读写月刊(2018年8期)2018-08-30
智富时代(2018年1期)2018-03-26
智富时代(2018年1期)2018-03-26
中学生理科应试(2017年7期)2017-08-09
轻兵器(2017年3期)2017-03-13
轻兵器(2017年3期)2017-03-13
中学物理·高中(2016年8期)2016-08-08
