
基于STK的运载火箭测控链路电平仿真分析
2022-04-25 11:47:54何谦
计算机测量与控制 2022年4期
何 谦
(中国卫星海上测控部,江苏 江阴 214431)
0 引言
在运载火箭的海上测控任务中,需要事先根据相关接口控制文件和测试参数,结合地面测控站设备工作性能,计算运载火箭在测控站覆盖弧段内的下行信号变化情况、天地信道理论捕获余量情况,重点分析运载火箭的弹道和姿态特征对下行信号质量的影响。该项工作是目标信号特性分析的一项主要内容,对测控站目标跟踪捕获策略的选择和信号变化情况预判有着重要作用[1-2]。通常根据任务弧段中测控角的变化,人工预先识别火箭实测天线方向图测试切面和逐点查找判读对应角度的天线增益,并根据跟踪性能表的距离值,手动计算地面测控站接收信号AGC数值。该种方法工作效率低、过程繁琐,且存在人为错误无法避免等问题。
STK软件是先进的商业化仿真软件,广泛应用于航空航天、卫星、导航、雷达、通信等领域的仿真、设计和分析应用。该软件不仅能够利用外部弹道数据文件和姿态文件对火箭的飞行弹道和飞行姿态进行仿真,而且能够利用其通信模块精确建模各种类型的接收机和发射机,仿真飞行器和地面测控设备的性能,从而实现对飞行器和地面站之间提供通信链路品质的详细分析[3-6]。
本文利用STK软件建立了某型运载火箭测控系统仿真模型,重点介绍如何将实测的天线方向性图转换成STK的数据格式,并利用生成的天线电磁场辐射图进行地面站测控链路性能分析,通过某次海上测控任务的仿真分析和实际跟踪结果比较,证明该方法简捷高效,可以满足目标特性分析的需求。
1 坐标系的建立及转换
1.1 坐标系的建立
STK中提供了很多预先定义的坐标系,如发射站本体坐标系、运载火箭和发射机本体坐标系,但对于一些特定坐标系,如发射坐标系则需要利用矢量几何工具进行定义[7-9]。文中用到的几种坐标系如下:
1)发射站本体坐标系。原点在发射站中心,+X轴在水平面内指向天文北,+Y轴在水平面内指向天文东,+Z轴按照右手法则指向地心方向,见图1(a)。
2)发射坐标系。原点在发射台中心,+X轴位于水平面内,指向发射瞄准方向,火箭发射角A以天文方位角标定,+Y轴与发射点的铅垂线一致,指向天顶,+Z轴按照右手法则确定,见图1(b)。一般采用相对于发射坐标系的位置和速度信息描述运载火箭弹道,同样采用相对于该坐标系的偏航、俯仰和滚动角方式描述运载火箭姿态。
3)箭体坐标系。原点Or在运载火箭质心,+X轴指向火箭头部并与火箭纵轴重合,+Y轴垂直于纵轴指向Ⅲ舵面,+Z轴按照右手法则确定,指向Ⅳ舵面,见图1(c)。
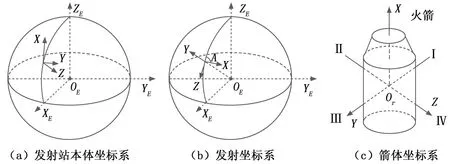
图1 各坐标系示意图
4)发射机坐标系。该坐标系为STK规定的发射机本体坐标系,固连于运载火箭且与箭体坐标系重合。
1.2 坐标系的转换
在运载火箭测控链路性能仿真过程中涉及到发射站本体坐标系到发射坐标系的转换,发射机坐标系和箭体坐标系的转换。几种坐标系的转换过程如图2所示。
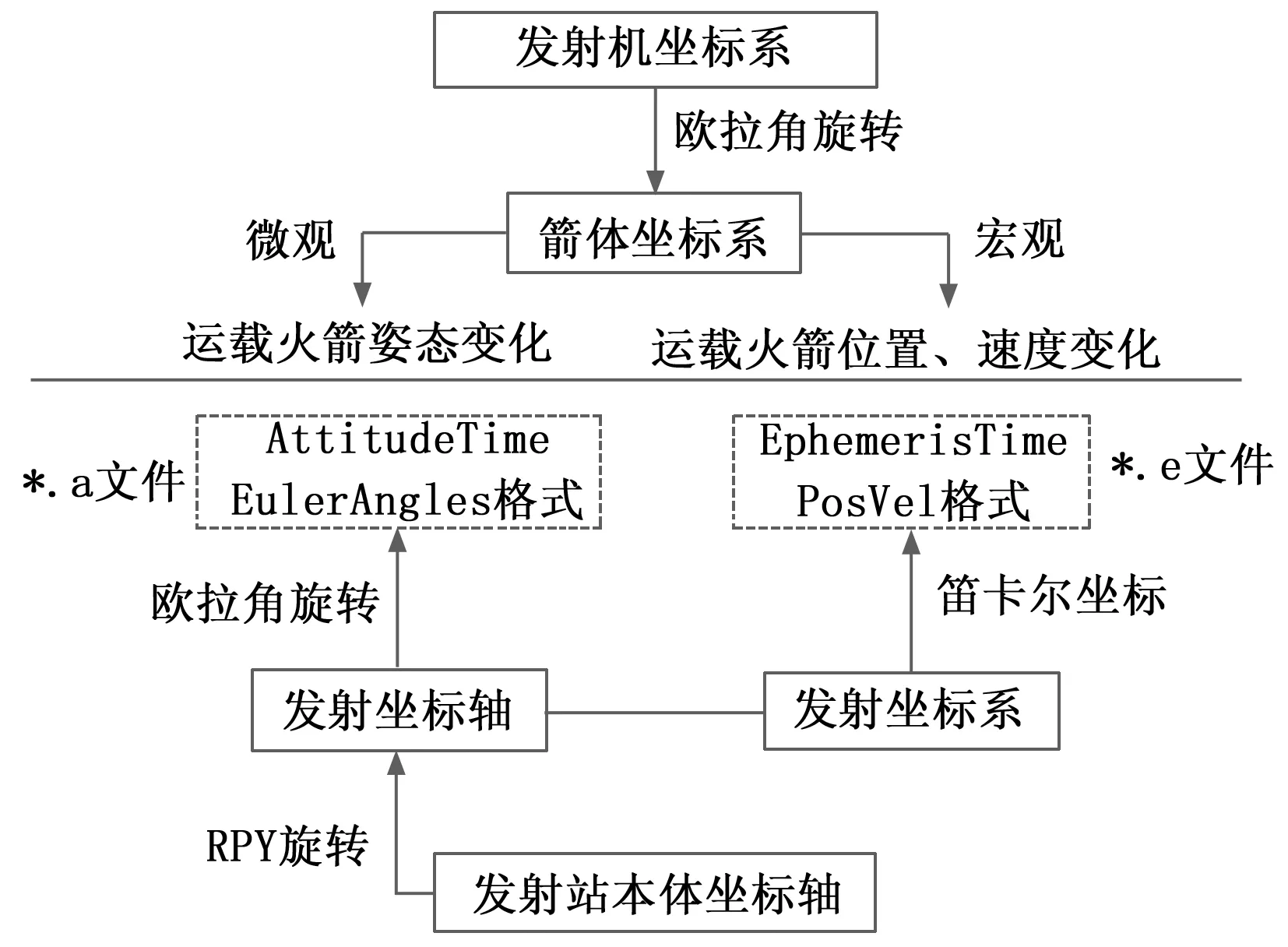
图2 坐标系的转换关系
2 运载火箭仿真场景建立
2.1 仿真场景设置
运载火箭主动段飞行过程中存在的动作包括一级、二级及三级火箭的点火和分离等,在仿真过程中仅考虑航天测量船测控弧段的下行链路跟踪性能。利用STK软件对运载火箭仿真场景进行建立[10-12],具体场景设置步骤如下:
1)在STK中创建场景,并设置仿真场景起始、停止时间,起始时刻选择火箭发射的时刻,停止时刻选择星箭分离时刻。
2)添加地面发射场、地面测控站等对象,并在Basic参数中填写实际经纬度、高程、WGS-84坐标系等位置信息。
3)添加运载火箭对象,在运载火箭的弹道Propagator中选择“StkExternal”,导入制作的*.e外部星历文件;在运载火箭的姿态Precomputed中选择外部文件,导入制作的*.a外部姿态文件。
4)利用Vector Geometry Tool建立发射坐标轴和发射坐标系。发射坐标系的建立可通过发射站坐标系旋转转换得到,两个坐标系的原点相同,坐标轴按照STK中的YPR旋转方法,采用RPY次序,如果射向为90°,则欧拉角依次为90°,0°,-90°。
5)地面测控站添加传感器对象确保测控站工作时地面天线始终指向火箭,给地面站传感器添加接收机组件对象,同时设置接收机的工作频率、接收天线增益、系统噪声温度及附加的链路损耗等,这些参数可根据地面测控站的实际指标进行设置,确保仿真结果的可信度。
6)运载火箭增加发射机对象,设置发射机信号频点、发射功率以及发射天线的方向性图,其中发射天线的方向性图由外部文件设置,其余参数根据火箭型号的实际指标进行设置。
2.2 外部弹道数据文件和姿态文件
测控链路的性能不仅与运载火箭和地面测控设备的性能有关,而且与运载火箭飞行的弹道和姿态有关,其中运载火箭飞行的弹道和姿态可能影响自由空间损耗和天线增益等性能指标。运载火箭的飞行弹道和姿态都是根据任务要求进行设计,STK提供了利用外部弹道数据文件和外部姿态文件的方式输入运载火箭的弹道和姿态,便于运载火箭的仿真分析。这两个外部文件必需按照特定的格式编写,才能成为STK能够识别的数据文件。
外部弹道数据文件“Ephemeris File Format(*.e)”来描述运载火箭位置和速度等轨道数据信息。在*.e文件编制过程中,需要设置仿真环境的版本号,用代码“BEGIN Ephemeris”标明轨道文件的开始,用关键词NumberOfEphemerisPoints描述运载火箭位置点数目,用关键词ScenarioEpoch描述仿真场景的起始时间,用关键词InterpolationMethod描述差值方法,用关键词InterpolationOrder描述插值阶数,用关键词CoordinateSystem描述文件中数据的坐标系,用关键词EphemerisTimePos定义文件中的数据内容与组织格式。本文的外部弹道数据文件设置为拉格朗日Lagrange法和EphemerisTimePosVel格式,采用笛卡尔坐标系中位置和速度数据确定航天器轨道,用1个七维向量表示(Ts,X,Y,Z,Vx,Vy,Vz),对应于火箭起飞累积Ts时刻在发射系中位置和速度分量。一般采用发射坐标系的位置和速度信息描述文件中数据的坐标系。
外部姿态文件用“Attitude File Format(*.a)”来描述运载火箭飞行过程的姿态信息,主要是表示航天器的本体轴相对于参考坐标轴的方向关系,关键词与上述基本相同。本文的外部姿态文件采用AttitudeTimeEulerAngles格式,用1个四维向量表示(Ts,fil,psl,gml),对应于火箭起飞累积Ts时刻,在发射系中运载火箭按次序规定的三个旋转角分量。仿真中定义的旋转角为发射坐标轴按321(Z-Y-X)的次序旋转到箭体坐标系下的欧拉角角度。
3 STK格式天线电磁场辐射图仿真
一般通过实测天线方向性图确定箭载天线性能,并以此作为测控链路性能分析的依据。要将实测的天线方向性图应用于STK的链路性能仿真分析,需要使用按照STK规定的格式生成的外部文件,文中选用PhiTheta格式。STK软件读取PhiTheta格式的外部文件,并通过曲线拟合等图形处理形成天线空间电磁场辐射图。最后经过坐标变换或平移进一步确定天线在火箭上的安装位置。图3为生成STK格式天线电磁场辐射图流程图。
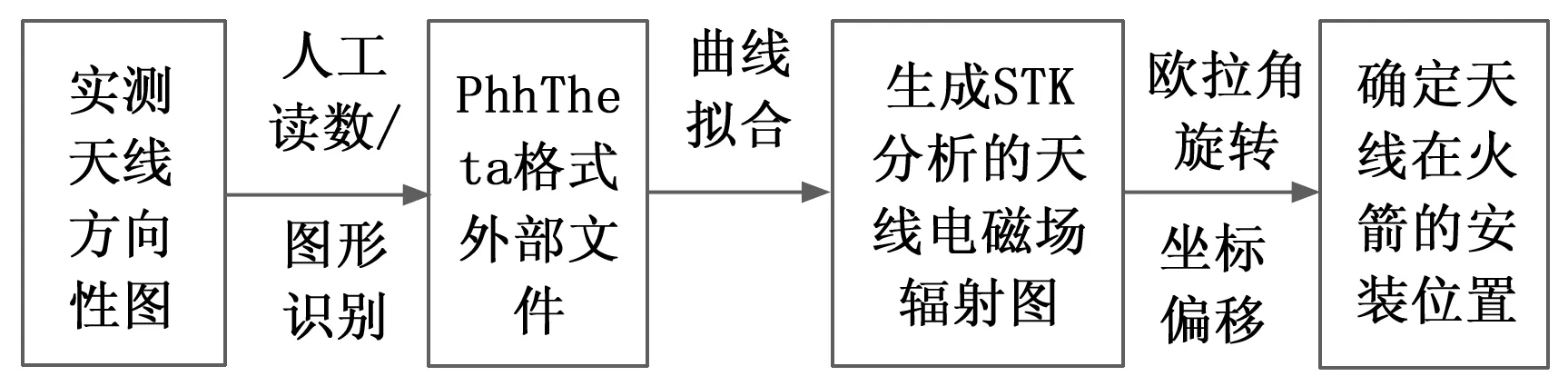
图3 生成STK格式天线电磁场辐射图流程
3.1 实测天线方向性图读取
与卫星实测天线方向性图不同,火箭测控考虑中继卫星测控与地面测控,天线的安装为对称结构安装,根据不同射向天线安装角度不一致。天线方向角α为运载火箭横截面内的指向角,Ⅲ象限为0°,从火箭头部向尾部看逆时针为增加方向,范围0~360°;β角为运载火箭纵剖面内的指向角,头部为0°,向尾部展开为正,范围0~180°。
通常运载火箭实测天线方向图都是采用天线方向角α给出,在测试时α角的范围为0~180°,β角的范围为0~360°,在天线方向图读取时需要进行一定的转换[13]。不同型号的火箭其实测天线方向图的测试起始面不同,如图4所示,当天线在测试时其安装位置处于α=0°时(位置1),测试切面角φ等于α角,测试时自(φ)α=0°开始,每隔固定角度测试一个子午面方向图;当天线在测试时安装位置处于α=B°时(位置2,图中B°=160°),测试切面角φ=α-B°。

图4 天线安装位置与切面角φ关系
天线实测方向图中的φ角测试子午面可以看做是火箭对天和对地两个全向天线的合成方向图φ角剖面,其天线方向图合成虚拟轴是+Z轴,与箭体坐标轴+X轴重合,指向火箭头部。实测天线方向性图可分为极坐标增益方向图和直角坐标增益方向图。从极坐标增益方向图可以直接看出天线辐射场的空间分布特性,极坐标增益方向图中的β角为极角,天线增益为极半径。图5为某型火箭φ=40°的子午面极坐标增益方向示意图,粗线象征天线在不同角度的增益大小,其中0°表示火箭头部。

图5 天线实测方向图φ角切面与β角读取示意图
读取天线方向图时需要确定天线测试时的安装位置和测试起始位置,从而确定火箭飞行过程中天线实际方向图的增益。如图5所示,天线安装在位置1时,φ=40°切面与φ=-140°切面共用,φ=40°切面时,β角取值0~180°,由0°开始逆时针读取天线方向图的上半部分;φ=-140°切面时,β角取值0~180°,由0°开始顺时针读取天线方向图的下半部分。天线安装在α=B°时,φ角取值范围和β角示意图的读取此处不再赘述。
3.2 PhiTheta格式的外部文件
实测天线方向性图与STK格式生成的外部文件对角度范围的定义并不完全相同。STK提供的外部文件生成天线方向性图主要有5种格式,对于运载火箭,θ角的定义与实测天线方向图中的β角定义相同,即与火箭+Z轴的夹角,此处利用PhiTheta格式来生成天线外部文件。PhiTheta格式利用φ角和θ角来规定天线方向性图(见图6),在发射机坐标系中,其中φ角为围绕天线轴向方向旋转的角度,范围是0~360°,其方向为从天线+X轴到天线+Y轴的逆时针旋转,轴向方向为天线+Z轴;θ角为偏离天线轴向方向的角度,范围是0~180°。

图6 STK中天线方向性图φ角和θ角定义
假定火箭天线方向性图在测试过程中选择φ为0~180°,每间隔一定角度进行切面,每个切面测试时θ角范围为0~360°。可见,STK中规定的φ角范围和θ角与实际天线测试中的角度范围不同,二者之间的对应关系如下所示:
1)STK中0°≤θSTK≤180°,0°≤φSTK≤180°,对应于实际天线测试0°≤θ实测≤180°,0°≤φ实测≤180°,其中θSTK=θ实测,φSTK=φ实测。
2)STK中0°≤θSTK≤180°,180°≤φSTK≤360°,对应于实际天线测试-180°≤θ实测≤0°,0°≤φ实测≤180°,其中θSTK=-θ实测,φSTK=φ实测+180°。
根据实测天线方向性图,人工识别各切面对应的β角度各点的天线增益,形成PhiTheta格式的外部文件“Antenna File Format(*.ant)”,在*.ant文件的编制过程中首先需要设定仿真环境的版本号,用关键词PhiThetaPattern表明生成天线方向性图的外部文件的格式,本文设置角度单位AngleUnits为“Degrees”,用关键词NumberOfPoints描述外部文件取值的天线增益点数,PatternData中的数据点数量不小于关键词规定值。如果间隔10°进行切面,每个切面间隔10°选点,共648点数,外部文件第一列为φ角,第二列为θ角,第三列为天线增益[14]。
PhiTheta格式的外部文件*.ant编制如下:
stk.v.9.0
PhiThetaPattern
AngleUnits Degrees
NumberOfPoints 648
PatternData
XX XX XX(φ θ Gain)。
3.3 生成STK分析的天线电磁场辐射图
本文为运载火箭添加复杂发射机模型Complex Transmitter Model,同时设置发射机工作频率、发射功率、传输速率等,天线类型选择External Antenna Pattern,导入上述PhiTheta格式外部天线文件,选中发射机属性3D Graphics/Attribute/Volume Graphics复选框,适当设置Gain Scale、Gain Offset参数,使得Gain Offset设置值与*.ant文件天线增益值之和大于零,才会完整显示图形,天线方向图是一个三维空间的曲面图形。图7为根据某型火箭实测天线方向图生成STK分析的天线电磁场辐射图,其中图7(a)为天线安装位置未确定时天线电磁场辐射图,发射机本体坐标轴与火箭坐标轴重合,发射机天线轴向方向为+Z轴。
在STK软件中也可以通过天线增益矩阵报告格式观察方位Azimuth范围为-180~180°,俯仰Elevation范围为0~180°内间隔一定角度的复杂天线的切片增益数值。
3.4 天线安装位置的确定
STK中的三维模型文件(mdl格式)是一个组件和图元组成的层次结构,组件都有自己的组件坐标系,根据组件内所包含图元在组件坐标系中的位置、比例及方向关系,能够进行平移、比例和旋转等动作变换。如果把运载火箭看作一个组件,那么天线是运载火箭的一个图元,在STK中利用天线方向性图仿真天线性能时,需要考虑天线在火箭上的安装位置,只有正确对天线的安装位置进行坐标变换,才能保证仿真过程中利用天线方向性图计算的天线增益与实际情况一致。对于测控站而言,火箭相当于一个质点,其天线的安装位置在箭体坐标系的+X轴上的平移可以忽略,遥测天线在各方向的增益只与其指向有关,即与天线在火箭纵剖面的安装位置有关,根据天线实测方向图φ角切面定义,对天和对地两个天线的合成方向图其合成虚拟轴是+Z轴(与火箭+X轴重合),而STK生成的发射机天线坐标轴与火箭坐标轴重合,因此需要将发射机天线坐标系进行欧拉转换,采用313次序,如果天线安装角为210°,则欧拉角依次为90°,90°,210°。天线安装位置确定后经过坐标转换的天线电磁场辐射图见图7(b),发射机天线坐标轴+Z轴(轴向方向)与火箭+X轴重合。

图7 生成STK分析的天线电磁场辐射图
4 测控链路电平性能分析
4.1 测控链路电平计算
根据信标雷达方程公式及地面站测控系统对目标捕获的性能要求,可以推导出系统满足测控站要求所需的公式如下[15-19]:
C/N0=EIRP-Ls+Lother+G/T-K
(1)
其中:Ls=20lgF+20lgR+32.44
式中,C/N0为载波噪声功率谱密度比(dBHz);EIRP为运载火箭发射的等效全向辐射功率(dBW);Ls为下行链路自由空间损耗(dB);Lother为下行链路极化损耗、大气损耗、指向误差损耗等(dB);G/T为主天线品质因数,通常在地面站雷达外场调试时实际测量并计算得到(dB/K);K为波尔兹曼常数,-228.6 dBW/(Hz·K);F为地面站下行链路工作频率,与运载火箭携带信标机工作频率一致(MHz);R为目标径向跟踪距离(km)。
在STK软件进行仿真过程中,需要注意两个重要无线链路参数的设置:主天线品质因素G/T和等效全向辐射功率EIRP。G/T是一个表征地面站天线接收系统灵敏度高低的技术指标,G为天线增益,T为系统噪声性能。EIRP表征箭载遥测天线或卫星转发器的发射能力,是发射机发射功率Power数值与箭载发射天线增益的乘积;Ls为STK软件根据外部弹道数据文件及Frequency数值自动计算到地面测控站的自由空间损耗;Lother为STK软件计算中的附加损耗,可用上述各类损耗经验值直接对仿真数据进行修正,数值可以附加在地面接收机模型或者箭载发射机模型中。
仿真过程中运载火箭与测控站构建通信链路,火箭弹道和姿态角时刻在发生变化,其链路计算过程中箭载发射天线增益是沿着合成天线辐射曲面随着测控线的变化而动态取值。
4.2 AGC-C/N0曲线的标定
测控站AGC- C/N0关系曲线在测控系统角度捕获中作为转自跟踪模式的判决依据,以及在轨道测量的数据处理中起着重要的作用。STK中无法直接得到地面站接收到的AGC数值,所以需要对地面站接收的载波噪声功率谱密度比(C/N0)与AGC曲线的关系进行标定。标定方法是:通常采用在场放前定向耦合器输入端口输入所用工作频率的电平,电平变化范围根据要求通常为60~80 dB,步进1 dB,然后在下行接收链路所需的左旋或右旋测试端口接入频谱仪,读出C/N0值,同时对应在综合基带界面读出左旋或右旋的AGC电压值。
AGC曲线与载噪比C/N0基本保持规律性联系,通过对标定数据进行分析和总结,估算得出AGC曲线的经验计算公式。文献20采用最小二乘法建立AGC电压和载噪比C/N0的关系模型,采用二阶拟合函数进行AGC数值的估计可以达到设备要求,较准确地估算出试验任务中两者之间的关系,能够真实地反映飞行目标信号的变化规律。
4.3 测控链路电平分析比较
STK软件对运载火箭进行测控链路性能仿真,仿真过程包括计算地面测控站对运载火箭的跟踪性能、箭载设备天线方向图对测控站的覆盖情况等,然后根据导入的PhiTheta格式外部文件生成的天线电磁场辐射图自动查找测控线方向的天线增益值,最后利用公式(1)计算地面测控站下行链路的载波噪声功率谱密度C/N0,最后根据测控站AGC- C/N0关系曲线得出仿真结果。
运载火箭在飞行过程中下行信号通常包含两种相互正交的极化分量,信号强弱会根据火箭的飞行弹道和飞行姿态可能随时变化,因此地面测控站必须相应采取极化分集接收技术以最大化接收左右旋信号,减小噪声对跟踪系统的影响。图8给出了某次运载火箭飞行任务地面测控站接收的左右旋向AGC电压实测结果和STK仿真结果的比较,实际接收信号是从火箭进入地面测控站开始至火箭入地平结束的时间段,而仿真时间是从火箭进入地面测控站开始至理论星箭分离时刻,从图中可以看出星箭分离之前仿真结果和实测结果的变化情况大致相符,说明下行链路箭地测控设备的实际性能与STK设置的值相符,证明了利用STK对运载火箭测控链路性能仿真的正确性和有效性。

图8 实测AGC电压结果和仿真结果的比较
图8中存在误差的原因主要是利用外部文件输入的天线方向性图中φ角切面间隔较大,β角读数不准确,而且火箭在飞行过程中由于姿态变化存在一定程度的遮挡或大气环境等外界的影响,都有可能导致仿真数据与实际测量数据存在一定程度的误差。
5 结束语
文中给出了利用STK软件对运载火箭测控链路性能分析的仿真场景设置方法和仿真分析的步骤,重点讨论了利用外部文件输入火箭实测天线方向图的方法。通过STK软件对输入的外部文件拟合生成STK分析的天线电磁场辐射图,弥补了实测天线方向性图切面数量少,PhiTheta格式外部文件间隔点数少的不足,实现了利用STK软件对运载火箭跟踪的下行链路电平估算,突破了传统使用人工对实测方向图的离散点识图读增益的局限。通过某次运载火箭飞行任务的仿真分析和实际跟踪结果比较,证明该仿真分析方法能够满足任务需求,仿真结果可以作为测控链路性能分析的依据。
由于各种不同类型的火箭其天线安装位置相对固定,其实测天线方向图基本延续,后续的工作是将不同类型的火箭天线方向图不同切面的增益取值利用识图软件自动识别出来,然后形成与之配套的PhiTheta格式的外部文件,在任务前直接调用相关文件即可完成对运载火箭测控链路电平的仿真分析。文中的分析方法同样适用于对卫星的跟踪测控性能仿真分析。
猜你喜欢
中国新通信(2022年9期)2022-06-10 02:31:54
北京航空航天大学学报(2021年6期)2021-07-20 07:23:56
电子制作(2019年19期)2019-11-23 08:41:36
环球时报(2019-09-23)2019-09-23 06:15:25
电子测试(2018年22期)2018-12-19 05:12:58
电子制作(2018年19期)2018-11-14 02:37:02
山东工业技术(2016年15期)2016-12-01 05:31:42
太空探索(2016年12期)2016-07-18 11:13:43
电子设计工程(2015年3期)2015-02-27 12:03:58
电子设计工程(2014年18期)2014-02-27 12:00:19
