
风机变极调速主回路选用分析
2022-04-23 02:27尤士刚
智能建筑电气技术 2022年1期
尤士刚
(华通设计顾问工程有限公司,北京 100034)
0 引言
在设计实践中,通风专业经常会采用“双速风机”的作法,如在平时用于排风而在消防时用于排烟的两用风机,就是采用“双速”的作法来实现两种工况下的设计目标(风量、风压)。但双速风机的主回路应采用何种接法应做认真评估。
哪种主回路接法适合于风机变极调速?两种工况下的功率比与接法是否有对应关系?此类问题一直未引起应有的重视,也没有相关的论文对此进行论述。
本文依据机座号与转速及功率的对应关系给出接线形式的选择方法,同时依据电机学的基本原理,通过对交流异步电动机的特性分析及风机负载特性分析,总结归纳出常用风机变极调速接线形式的特点及应用指引(如根据功率比确定接线形式),推论出适合于双速风机的接线形式。
1 通过“功率比”确定主接线
1.1 主接线
交流异步电动机设计制造时可通过对三相定子绕组的不同布放处理、设置绕组的引出线端头数量等方法来实现不同的同步转速,进而实现“变极调速”的目的。绕组接法有多种,如用于双速的△/YY、Y/YY、Y/Y接法,用于多速的Y/△/YY、△/Y/YY、△/△/YY/YY、Y/Y/YY接法等。
1.2 机座号与转速及功率的对应关系
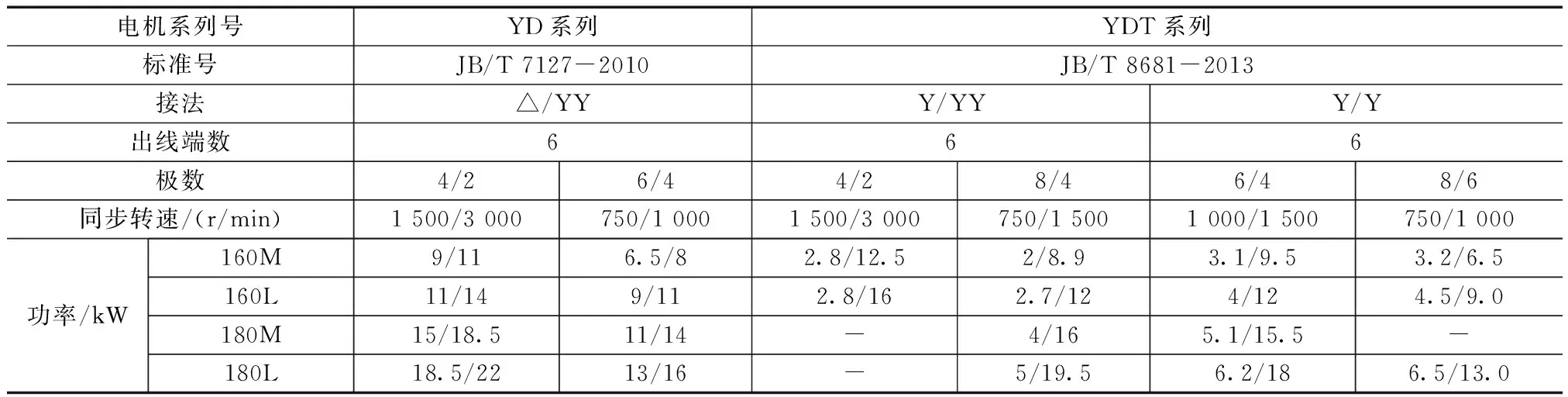
对电动机的主要技术条件,机械行业内有明确的标准,如《YD系列(IP44)变极多速三相异步电动机技术条件(机座号80~280)》JB/T 7127-2010、《YDT系列(IP44)JB/T 8681-2013变极多速三相异步电动机技术条件(机座号80~315)》。
表1为笔者整理的常用接法下的机座号与转速及功率的对应关系。设计人员可以根据表1中的功率值查出接线方法,如功率比为2.7/12的电动机,主回路为Y/YY接线;功率比为6.5/13的电动机,主回路为Y/Y接线。
2 与风机调速有关的几个基本概念
在电机学领域,电机划分为直流电机、交流电机(包括同步电机与感应电机,变压器可视为具有整距绕组的感应电机)。在民用建筑领域,风机、泵类应用最为广泛,均属感应电机(亦称为交流异步电动机)的范畴。本节介绍与异步电机相关的几个相关知识点。
常用机座号与转速及功率的对应关系 表1
2.1 变极调速
电机的空间角度可以用“电角度”θae表达,θae=(poles/2)θa,其中poles为定子绕组形成的磁极数,θa为空间角度。电机转子机械角速度ωm与同步角速度ωs的物理关系如公式(1)~(2)所示:
ωm=(1-s)ωs
(1)
(2)
式中,s为转差率,ωe为电角速度(我国f=50,ωe=2πf=100π)。
由式(1)~(2)可知,改变磁极数即可改变同步角速度,进而实现调速。此种调速方法即为“变极调速”。变极调速的具体实现方法主要有两个:一是在定子绕组槽内嵌装一套绕组,可将一套绕组中部分线圈按一定规律反接以改变其电流方向,进而改变磁极数;二是在定子绕组槽内嵌装两套独立绕组,两套绕组的磁极数不同。
不同的绕组布放方法及引出线位置可实现不同比例的变极:倍极比变极(如表1中的4/2、8/4)、非倍极比变极(如表1中的6/4、8/6)。通过绕组的串联/并联、正接/反接、△接/Y接的组合,可实现多种极数比。图1为4/2变极的原理示意图(绕组展开图)。
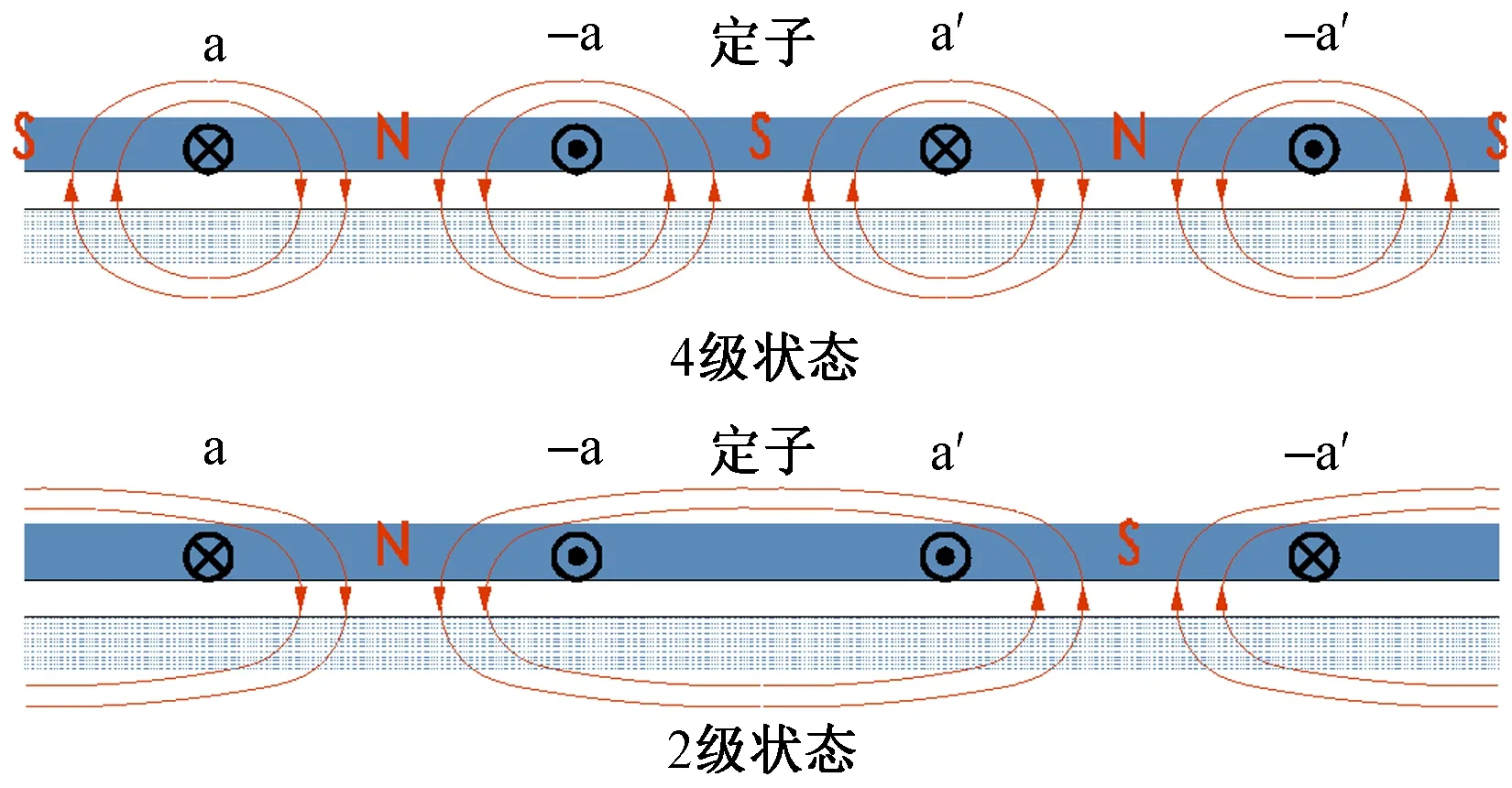
图1 变极调速原理示意图
由图1可以看出,改变a’、-a’的电流方向,磁极数由4变为2。
2.2 异步电动机的特性
电机回路经频率折算和转子绕组折算后,可获得T形等效电路,应用戴维南定理,可进一步简化为图2所示的等效电路。
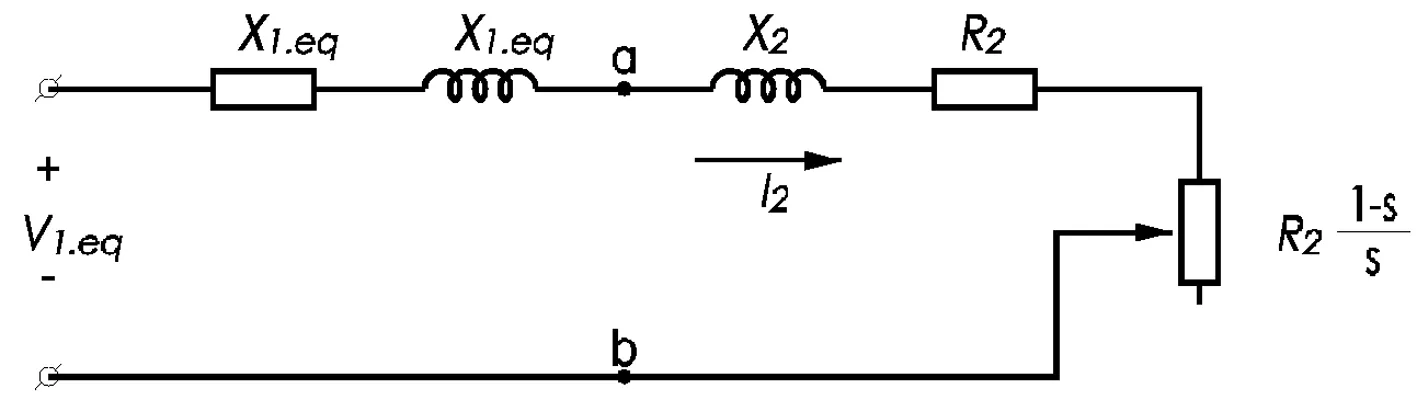
图2 电机等效电路图
根据等效电路,可得功率和转矩的计算公式如式(3)~式(5)所示:
(3)
Pem=ωsTem
(4)
Pmech=ωmTmech
(5)
式中,Pem为电磁功率,Pmech为机械功率,可以看出,在正常运行区段,机械转矩与磁极数成正比,与绕组上的电压的平方成正比,与绕组的电阻也有关系。图3所示为电机功率和转矩的关系曲线。需要注意的是,图3中设定fl为满载状态。
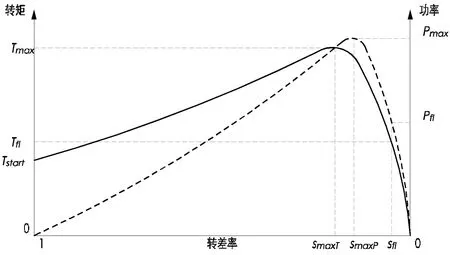
图3 电动机区域的T(s)和P(s)曲线
2.3 交流异步电动机的拖动
拖动系统的运动方程如式(6)所示:
(6)

不同的负载呈现不同的特性,对于风机、泵类负载,其负载转矩为转速n的函数,二者之间的关系如公式(7)所示:
TL=f(n)=TL0+k×n2
(7)
式中,TL0为初始转矩(对风机而言,一般为0.23倍额定转矩)。
电机的选取要遵循电磁转矩Tem与负载转矩TL匹配的原则,电机过大会出现大马拉小车的现象,电机过小则无法满足设计工况。需要注意的是,电机的启动转矩Tstart应大于初始负载转矩TL0,否则无法正常启动。
3 常用变极调速的主接线及特点分析
综合上文,对常用的接线方式进行有针对性分析。△/YY、Y/YY接线较为常用,且二者主回路相同,容易混淆,故本文主要对这两种接法进行技术分析,对Y/Y接线进行简要说明。为了便于比较,△/YY、Y/YY接线均以4/2极数比进行模拟分析。
3.1 △/YY接线
△/YY的主回路见图4所示,△/YY绕组端子接线图见图5。
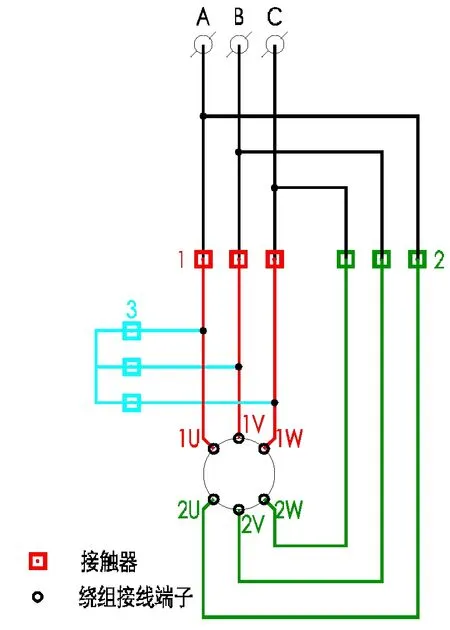
图4 △/YY、Y/YY接线主回路
图5 △/YY绕组端子接线图
需要特别注意的是,对于倍极比变极,为了使变极后电动机的转向不变,在绕组改接时,应把接到电动机端头电源的次序进行相应改变,图5中端子接线图即体现了此要求。其深层原因是电角度导致的,θae=(poles/2)θa,即电角度与极数成正比,以4/2极数比为例,若L1相的电角度为0,则2极时L2相、L3相的电角度分为120°、240°,4极时L2相、L3相的电角度分为240°、480°(等效于120°),因而导致磁动势的旋转方向与2极时相反,若电动机端头电源的次序不变会导致两种接线下的转向不同。△/YY接线的绕组接线关系见图6所示。
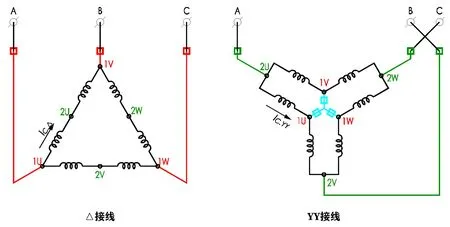
图6 △/YY绕组接线关系图
下面对比△接线、YY接线时的转矩与功率。由式(3)可以看出,机械转矩与磁极数成正比,与绕组上的电压的平方成正比。磁动势是由各段绕组建立的磁动势叠加而来的,因而分析一段绕组上的电压即可得到预期的结果:根据公式(8)~(9)可得式(10),依据式(10)及式(5)可得式(11)。
(8)
poles△=4,polesYY=2
(9)
(10)
Pmech.△/Pmech.YY= 3/4
(11)
式中,下标“c”指图中的一段绕组。
将式(11)与表1中相应数据对比,可证明上述分析与推导的正确性。需要说明的是,表1中所列功率为输出功率,与机械功率之间差附加损耗及机械损耗,因而与式(11)为近似比例关系。
3.2 Y/YY接线
Y/YY接线的主回路与△/YY接线相同,见图4所示。对于倍极比变极,在绕组改接时,也应把接到电动机端头电源的次序进行相应改变。Y/YY接线的绕组接线关系见图7所示。
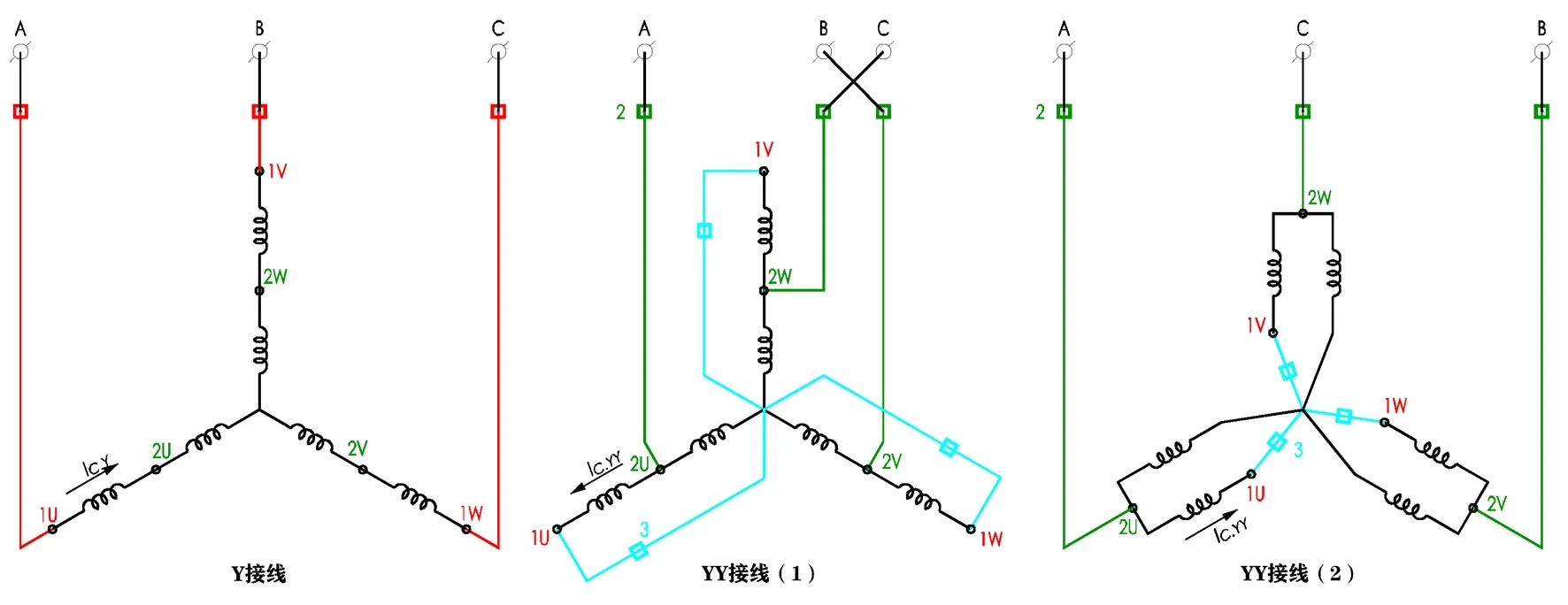
图7 Y/YY绕组接线关系图
类似于△/YY接线的分析方法,可分析出Y/YY接线的转矩与功率关系,见式(12)~(15)。
Uc.Y=1/2U0,Uc.YY=U0
(12)
poles△=4,polesYY=2
(13)
Tmech.△/Tmech.YY= 1/2
(14)
Pmech.△/Pmech.YY= 1/4
(15)
同样,将式(15)与表1中相应数据对比,可证明上述分析与推导的正确性。
3.3 Y/Y接线
Y/Y接线为2套独立绕组,绕组布放方法不同,磁极数不同;绕组自身的参数(电阻)不同,也会对转矩产生影响。由表1中可知,工程实践中,Y/Y一般被设计为功率比1/3(转速比1 000/1 500)、功率比1/2(转速比750/1 000)。Y/Y接线的主回路见图8所示。
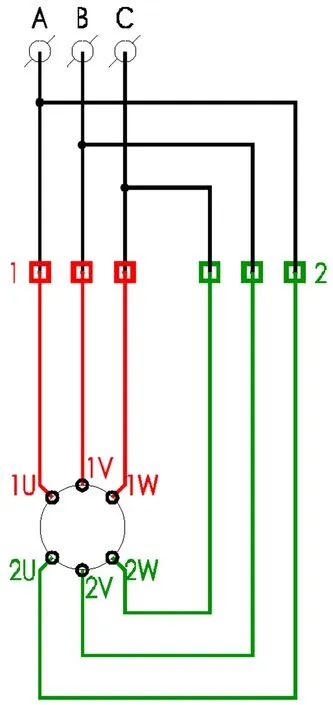
图8 Y/Y接线主回路
4 接线方式与风机负载间的匹配性分析
由前述分析可知,△/YY、Y/YY具有相同的主回路,但两种接线下具有不同的机械特性。采用△/YY接线用于风机的变极调速,需按高速运行工况设计选择风机,使机械转矩大于负载转矩(图9中实线)。但在低速状态下平衡点可见,电机性能严重浪费。而Y/YY接线与风机负载具有很好的匹配性。
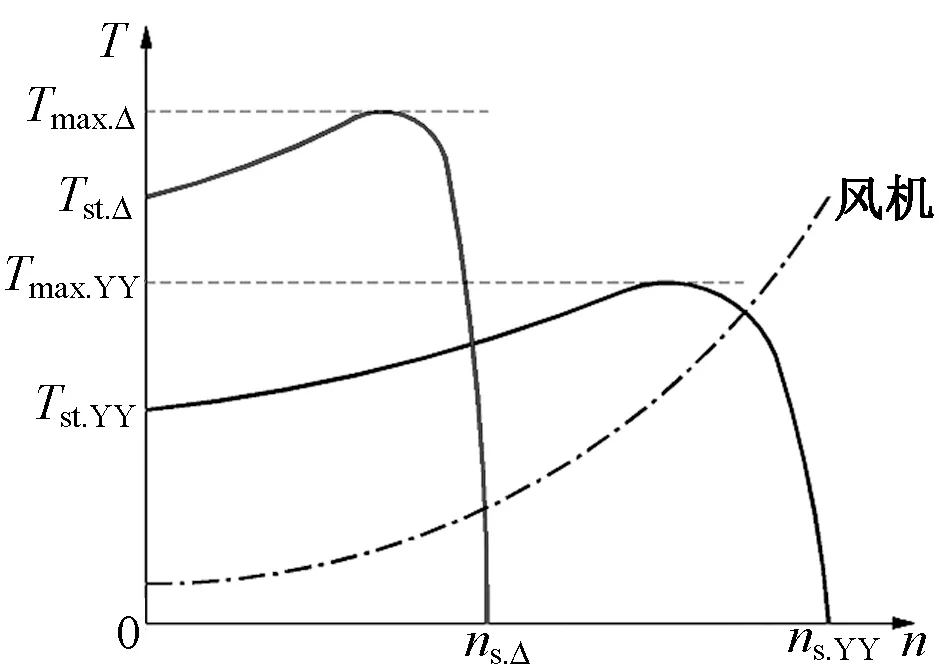
图9 △/YY接线T(n)曲线及负载TL(n)曲线
5 结束语
同为变极调速,但不同接线、不同的极数比均会导致不同的转矩比和功率比。综合对比表见表2。
△/YY接线不适合于风机类负载,更适合于恒功率负载;Y/YY接线、Y/Y接线均适合于风机类负载的变极调速。
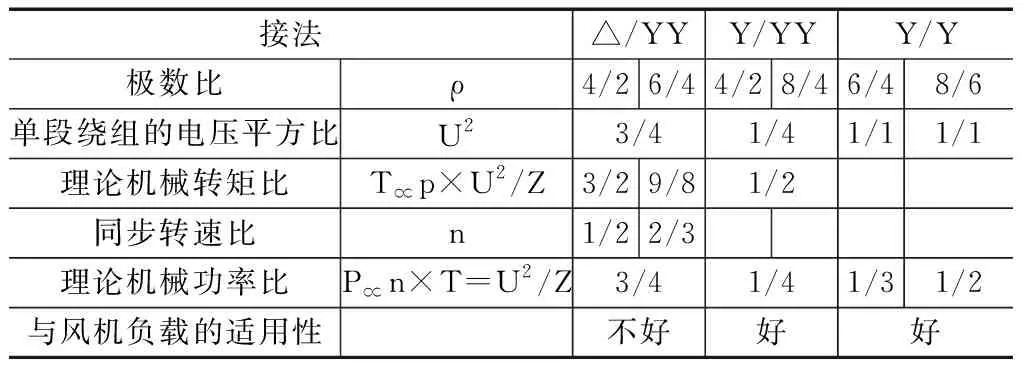
绕组接线方式综合对比表 表2

猜你喜欢
防爆电机(2022年4期)2022-08-17
防爆电机(2021年4期)2021-07-28
防爆电机(2021年4期)2021-07-28
防爆电机(2021年2期)2021-06-09
电力与能源系统学报·上旬刊(2020年4期)2020-10-12
物理之友(2020年12期)2020-07-16
幼儿教育·父母孩子版(2017年9期)2017-11-15
电子制作(2017年2期)2017-05-17
电子制作(2017年1期)2017-05-17
电子制作(2017年4期)2017-04-21
