
基于激光扫描技术的室内空间定位*
2022-04-23 02:27梁晓旭
智能建筑电气技术 2022年1期
梁晓旭, 刘 敏, 张 举, 何 为, 刘 鹏
(建科公共设施运营管理有限公司,北京 100044)
0 引言
随着我国城市化进程的不断加快以及配套基础设施的不断完善,建筑中存在大量能源、环境、状态传感器,分散于空间中的各个位置,并以各种编号规则存在于各个专用系统中,在BIM数字孪生过程中,上述专用系统以数据接口方式对接平台,这种对接类似于一个显示的分屏器,仅能做数据的展示或在本系统维度上做分析,系统间的数据在时间、空间、业务上缺少统一而无法进行协调分析和联动;同时,相较于传统物业的人工运维业务有极强的落地性和可操作性,数字运维仅在信息汇总和展示层级做文章,没有落实到业务中,且运维团队中围绕空间位置转达的设备名称、工具准备、人数需求、工作深度等信息,在现有市场上的任何系统与管理平台中都没有体现;此外,现状运维单位受限于专业能力,较难做到通过BIM模型的更新及时跟进建筑室内空间的变化。因此,如何加快推进公共设施的智慧化运营管理模式,实现设备的自动识别定位成为了现代运维公司亟待解决的问题之一,也是公共设施运维管理突破传统转向智慧空间数字化管理的重要一环[1-3]。传统采集手段多采用GPS+IMU作为组合模块获取三维信息[4],然而该方法在地下或室内等缺少GPS信号的场景中具有局限性,同时室内空间的复杂性导致传统作业方式受到很多局限,扫描时存在死角[5]。因此,在实际运维工作中有必要采取一些手段来获取室内及地下的全部三维信息,目前最有效的方式是采用移动测量系统进行快速扫描与定位。
移动测量系统一般采用LiDAR(激光雷达)、全景相机、IMU(惯性测量单元)来检测。LiDAR具有实时性迅速、精度高、误差相对小且恒定、不受GPS信号以及室内光线限制等优点,在生成地图、建模等方面具有很高的应用[6];虽然能提供较高精度的结果,但其容易受到外界环境特征影响,当特征不显著时,采集频率低,其精度也大大降低。相较LiDAR来说,IMU技术不受外界环境影响,能提供高频的位置、速度等参数,但是长时间运行后其定位误差会积累,因此,IMU只能在短时间内提供高精度的定位结果。LiDAR和IMU结合了两种技术的定位优势,相互补充,因此可在室内和地下环境中实现高精度和高采样频率连续工作。
综上,本文直接采用基于“LiDAR + IMU”的组合扫描定位技术来获取室内及地下环境的三维信息,本方法为建筑环境中的各种传感器的空间定位提供了新思路,并在智能化运维速度、精确度以及便捷部署度上给予支持。
1 传感器原理
1.1 QS轻型室内测量
QS轻型室内测量系统主要是采用多传感器融合SLAM算法,以低成本传感器完成高精度扫描,适用于室内场景、室外中小级场景。该系统由两台激光扫描仪、RTK、IMU、全景相机等组成(室内环境无需开启RTK,故此处不赘述),其中扫描仪采用VLP-16线激光雷达,测量距离100m,每秒可输出30万个数据点,±15°垂直视野,360°水平视场扫描;系统配备的Novatel 718D RTK支持千寻厘米级定位;MEMS级IMU具有较高的采样率和运算速度,因此可以实现极短的时延;全景相机采集系统置于系统最上端,能够俯拍整个画面。表1所示为QS轻型室内测量系统硬件指标。

QS轻型室内测量系统硬件指标 表1
激光雷达工作原理类似声呐,将激光束作为其探测信号,测量传感器和被测物体之间的距离和角度[7]。LiDAR工作时,发射器发出激光束,激光被发射后,一部分激光被反射回来并被接收设备接收[8],根据激光发射与接收的时间差计算传感器与目标物体之间的距离[9-10];根据激光束频率变化、方向等可确定目标物体的方位以及速度[11-12]。
1.2 手持式传感器采集设备
QS轻型室内测量系统在使用上不便于普通运维操作人员学习,因此为了实现对室内建筑中所安装的新型传感器的空间信息等进行智能化采集,普通运维人员经过简单培训就能进行物联网设备的标定与连接,设计采用手持式传感器采集设备,从而为后续的各类型智能应用提供基础数据。手持式传感器采集设备为新型传感器智能监控设备,其硬件系统见表2。
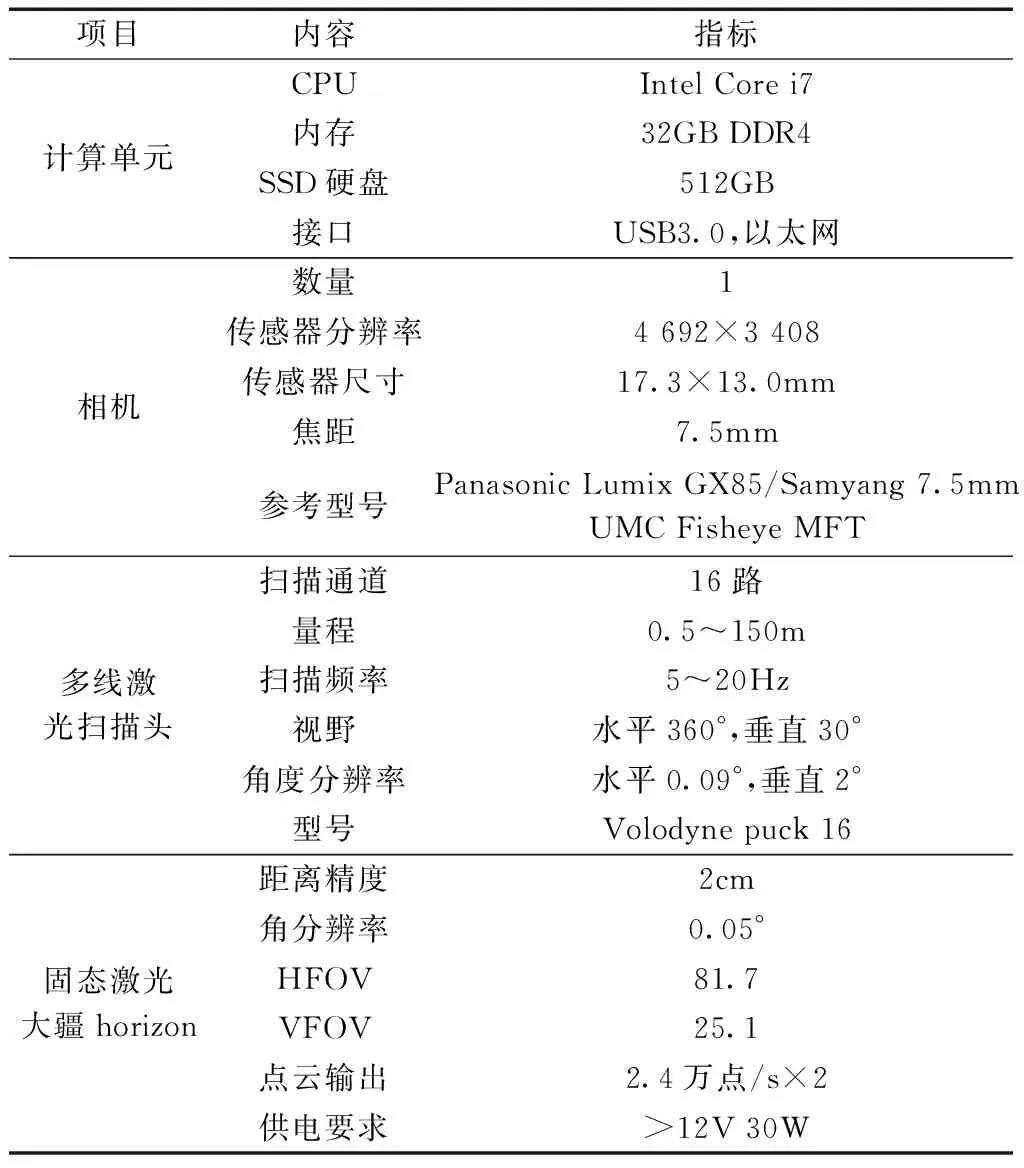
手持式传感器采集设备的硬件系统 表2
传统的室内扫描方案大多基于单线/多线激光SLAM的技术方案,单线SLAM在非平面地形下无法使用,多线SLAM虽能适应复杂地形,但在几何特征少、重复度较大的场景下容易失效;在场景较单调等纹理和语义信息都不够丰富的情况下,视觉SLAM的应用同样会受限。综上,多线激光SLAM技术利用环境的几何信息,视觉语义SLAM利用环境的纹理和语义信息,二者形成有效的信息互补,同时IMU在短时内作为运动预测的有效补充,可有效解决瞬时快速旋转等问题。综上,本技术为一种混合SLAM方案,通过对IMU、激光、相机的图像处理,综合利用环境的几何、纹理及语义等信息,提高在不同场景下的精度。
2 项目实施方案
在项目的实施过程中,主要分为建筑物三维实景地图采集、三维实景地图与BIM模型融合、新型传感器数据采集和智能化数据后处理四部分。
(1)建筑物三维实景地图采集
扫描前首先要检查设备以及可能用的辅助设备的完整性,并了解采集区域的环境状况等从而进行路线规划和控制点的布设,本项目要求达到20cm的精度要求,用全站仪将控制点坐标测出备用。采集时依次开启传感器开关、Camera,等待10s左右(听到相机曝光两声)开始按规划路线进行采集,对于不需要采集或重复的路段,点击暂停记录,随后行驶至待采集路段点击恢复记录,这样能够减少数据量,但同时要注意暂停记录和恢复记录的位置数据可多但不能少,避免数据丢失;对于闭合路线采集结束时,闭合路线要有一小段的重复轨迹,采集完成时,停止记录、查看数据并关机。
将获取的原始点云数据等拷贝到服务器上,基于多传感器融合SLAM算法进行成果点云解算,形成高精度轨迹数据;利用已测控制点和点云中同名点比对,统计点云精度,如果不满足要求则进行控制点纠正;纠正后进一步点云优化,包括去噪、去除动态物体、压薄处理等;将全景RGB映射到优化后的点云上,形成彩色点云;点云数据打包后,将分块的彩色点云文件合并成LAS格式文件作为最终点云成果。
(2)三维实景地图与BIM模型融合
在三维实景地图中,选取一些特征明显的标志点作为控制点,对其进行编号,并采集其空间位置信息;在BIM模型中,根据选取的控制点信息,对应的选取其在BIM模型中的空间位置信息,作为同名点数据;根据多组同名点数据,得到变换矩阵,将矩阵作用于源数据(实景地图/BIM模型),即可实现二者的相互变换,从而完成两种数据在空间上的融合统一。
现场人员持手持设备在建筑物内部指定位置开机,并进行多模态实时数据采集,对于待采集的传感器,应将手持设备近距离对准传感器进行针对性采集。将采集到的数据拷贝到服务器,并导入到智能化数据后处理平台进行解算,自动生成传感器数据信息。
3 结束语

猜你喜欢
中国交通信息化(2022年3期)2022-06-01
铁道勘察(2021年6期)2021-12-27
国画家(2021年4期)2021-10-13
现代企业(2021年2期)2021-07-20
全球定位系统(2021年1期)2021-03-26
华人时刊(2021年23期)2021-03-08
北京航空航天大学学报(2017年4期)2017-11-23
山东工业技术(2016年15期)2016-12-01
汽车之友(2016年15期)2016-08-23
电子制作(2016年21期)2016-05-17
