
基于高斯拟合的信号弹光斑中心定位方法
2022-04-22 05:58李天宇王明泉郝利华
激光与红外 2022年3期
李天宇,王明泉,郝利华,陈 亘
(中北大学 仪器科学与动态测试教育部重点实验室,山西 太原 030051)
1 引 言
信号弹是一种通过产生火焰,烟雾和声响传递信息的武器,对信号弹进行飞行参数测量是检验其质量的重要手段。目前,对于信号弹飞行参数的测量主要依靠光学测量方法完成,常用的测量方法包括人工测量法,基于声光信号的测量法[1]和双目立体视觉法[2]。双目立体视觉法因具备成本低,通用性强,精准度高的优点得到了广泛的研究与应用[3]。其原理是通过计算信号弹在视觉系统左右摄像机图像中的视差来计算信号弹的飞行高度。随信号弹飞行高度增大,其在系统中视差逐渐减小,由信号弹光斑中心定位偏差导致的测量误差逐渐增大,故对于光斑中心定位的准确程度直接决定了系统的测量精度。
常用的光斑中心定位方法有圆拟合法[4]、灰度质心法[5]、GHT(Generalizing the Hough transform)法[6]和图像矩法[7]。圆拟合法和灰度质心法算法复杂度低,计算精度高但需光斑分布均匀,抗干扰能力差。GHT法拥有很好的精度但计算成本高,且对图像中的噪声较为敏感,算法的稳定性不足。图像矩法抗干扰能力强,准确性高,但对光斑质量要求较高且算法复杂,应用场景有限。
信号弹通过燃烧星体发光,星体在燃烧过程中会产生大量烟雾,在图像中留下痕迹,故信号弹光斑不同于激光、红外、恒星等形成的光斑[8-11]。其光斑形状不均,明暗分布不匀,且信号弹在整个发光过程中,其位置、亮度与附近烟雾形状均持续发生变化。一般的光斑中心定位方法应用于信号弹光斑中心定位中很容易受图像中干扰因素影响,无法准确定位光斑位置,致使双目视觉系统测量结果产生极大偏差和波动。这些因素都为信号弹的精准定位带来了难度。
针对以上问题,现拟设计一种能够从双目视觉系统采集的图像中准确完成信号弹光斑中心定位的方法。该方法需要解决图像中烟雾、眩光、光斑失真等问题对光斑中心定位的影响,需具备通用性和稳定性,能够对不同种类和不同飞行状态的信号弹完成定位工作。同时,由于信号弹图像由双目相机以高分辨率图像序列采集,数据量极大,要求方法兼备准确性和高效性。能够在快速处理高分辨率图像序列的同时保证输出结果的精准性,满足信号弹飞行参数测量工作需要,为双目立体视觉技术在测量信号弹飞行高度工作中的应用提供新的方法。
2 信号弹光斑的图像特征
信号弹在双目视觉系统采集的图像中呈现的是一个圆形光斑,但由于信号弹通过燃烧星体发光,飞行过程中会在天空留下烟雾。烟雾在图像中不仅所占像素面积远大于信号弹目标,且会被信号弹照亮并在图像中与光斑连通,给信号弹的定位造成严重影响。
如图1(a)为实验所采集序列中一帧图像的部分区域,图1(b)为其三维灰度分布图。可以看出图像中天空的灰度值极低,信号弹光斑所占图像面积较小,灰度值基本满足高斯分布,烟雾与光斑连通,所占图像面积较大,灰度值偏低且分布较为均匀。

图1 信号弹光斑的图像特征
采用OTSU法提取信号弹光斑,由灰度质心法和圆拟合法获取的光斑中心如图2所示。当信号弹运动速度快,发光强度较大时,图像中烟雾与镜头像差导致的眩光对定位方法带来了较大的干扰,常用的光斑中心定位方法无法正确得出信号弹光斑的中心位置。

图2 常用光斑提取方法处理结果
3 基于区域生长的光斑分割
区域生长法是一种思路简单,对纹理、灰度、颜色特征敏感的图像分割方法。这种方法适用于特征明显,区域连通的目标分割。
3.1 传统区域生长法
传统区域生长法以人工选取的种子点作为生长的起始区域,在种子点的邻域内搜索与种子点具备相似特征的像素并将其与种子点合并为一个区域,再以加入到区域中的像素作为种子点搜索新的邻域,直到该区域内所有像素的邻域均无满足要求的点为止结束生长。
这种方法原理上能够满足信号弹目标分割需要,但在实际使用中存在抗干扰能力差,结果为二值图像无法保留图像原始信息等不足。同时,信号弹图像在实际测量中以序列采集,数据量极大,要求方法必须在保持稳定性和通用性的同时具备自动化处理能力。为满足信号弹的图像特征与测量工作需要,我们对区域生长法做出改进。
3.2 改进的区域生长法
在区域生长法中,种子点的选取对方法效果起到了决定性作用。信号弹光斑在图像中的明显特征为灰度值极大且灰度值最大的点存在许多个,图像中其他区域不存在灰度值大于信号弹光斑的点。依据这一特征,可以将式(1)作为自动选取种子点的准则:
Si=Max(Gray(x,y))
(1)
式中,Si表示第i个种子点;Gray(x,y)表示图像中(x,y)位置像素的灰度值。
生长准则的定义对信号弹光斑的准确分割至关重要。依据信号弹光斑特点和发光过程中的变化规律,可以由已生长区域的灰度均值作为生长依据之一。定义已生长区域为R,已生长区域中包含的点个数为l。已生长区域的灰度均值可以由式(2)得出。
(2)
式中,avg表示已生长区域的灰度均值。
定义(m,n)为待生长邻域坐标;Gray(m,n)为其灰度值。当满足式(3)的条件时,继续生长,并在生长完成后更新avg值。
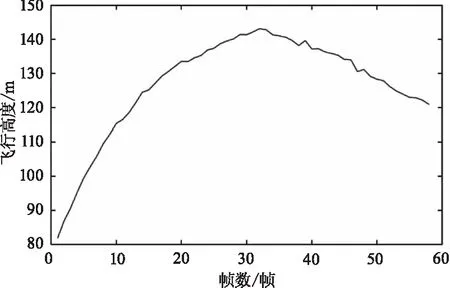
|Gray(m,n)-avg| (3) 式中,T为决定生长与否的阈值,实验证明T取16时效果较好。 为防止画面中存在的特殊背景,镜头异物等因素导致的误判,提升方法的稳定性,在每一帧图像结束生长时记录其生长区域的面积,计算其与先前一帧图像的生长面积差值。当差值大于上一帧面积的20 %时,令阈值T随生长共同更新,每发生一次生长使其减小1,减小到0为止。 为说明方法效果,我们采用计算机生成的信号弹光斑图像(下文简称生成图像)进行测试。使用计算机生成大小为45像素,边缘羽化为20像素的光斑,提取实际信号弹图像中的烟雾与生成光斑融合,形成光斑位于图像中心,整体尺寸为251×251像素的信号弹光斑生成图像。 如图3为生成图像经过改进的区域生长法处理的分割结果。生长区域符合光斑实际情况,未受到图像中眩光与烟雾影响,分割结果排除干扰因素,能够体现原始图像中信号弹光斑有效信息,为拟合提供了良好的数据样本。 图3 改进的区域生长法结果 二维高斯拟合法运算精度高,且稳定性好,对符合高斯分布的光斑图像具有较好的鲁棒性[12]。 常用的二维高斯分布函数表达式为: (4) 式中,A为高斯分布函数的幅值;xo,yo分别为曲面在x方向和y方向的极值点坐标;σx,σy分别为曲面在x方向和y方向的标准差。 对式(4)两边取自然对数有: (5) 式(5)代表的即是二元二次多项拟合问题,A,x0,y0,σx,σy为待拟合系数。可写作: lnf=ax2+by2+cx+dy+e (6) 式(5)中: (7) 通过最小二乘法对问题进行求解: Q=min{∑(ax2+by2+cx+dy+e-ln(f))2} (8) 由最小值条件有: (9) 可得线性方程组: (10) 对线性方程组式(10)求解,结合式(7)可解出x0和y0。y点(x0,y0)即为由高斯曲面拟合法求得的光斑中心坐标。 图4为生成图像本身与其分割结果(图3(b))的三维灰度分布图。 图4 生成图像三维灰度分布 使用上述方法对其进行拟合,拟合得出的高斯曲面和依据曲面极值点得出的信号弹光斑中心坐标如图5所示。 图5 拟合结果 由上述方法拟合所得定位结果误差在0.4个像素内。该方法基本未受到图像中影响因素干扰,能够正确、准确地完成对信号弹光斑中心的定位工作。 以实验采集的多组不同设计高度的信号弹图像序列为实验对象,使用改进的背景减除法[13]截取其中包含信号弹光斑的图像区域,使用本文方法对信号弹光斑中心进行定位,并逐帧完成信号弹飞行高度的测量。 飞行高度标准值由质检人员使用观测仪得出,仅提供信号弹飞行最高点的高度观测值。我们将测量结果的最大值与观测值对比,并计算理论光斑中心定位误差像素个数,结果如表1所示。 表1 最高点测量结果对比 由于在实际测量中,误差来源包括测量系统标定误差、中心定位误差以及人工观测误差等多个方面。此外,当信号弹飞行高度增大时,单位视差所映射的垂直高度也在增大,由单位像素中心定位偏移导致的误差将会对高度测量结果造成更大影响。故由实验结果计算的理论光斑中心定位误差要大于定位方法在生成图像测试中的误差。 从测量高度结果来看,使用本方法得出的测量结果与人工观测值基本一致,误差较小,能够反映信号弹实际飞行的最大高度值。 图6为实验中观测高度147 m的信号弹逐帧测量形成的高度曲线。信号弹接近最高点时飞行速度较小,高度与视差变化不大,微小的定位偏移容易导致极大的高度结果波动。本方法得出的高度曲线最高点附近数据波动较小,曲线整体趋势符合信号弹飞行规律,可以说明方法中心定位精准度高,稳定性强。对设计高度不同的信号弹与其发光过程中的不同状态均具备良好的中心定位能力,符合双目视觉测量系统测量信号弹飞行参数的需求。 图6 测高实验结果 信号弹光斑中心定位是信号弹飞行参数测量中所需的重要技术。本文提出了一种基于高斯拟合的信号弹光斑中心定位方法,使用改进的区域生长法提取信号弹光斑有效区域,排除图像中影响光斑中心定位的干扰因素,使用基于高斯拟合的光斑中心定位方法对分割信息进行拟合,提取拟合曲面极值点作为光斑中心坐标。实验证明,本方法能够在快速定位光斑中心的同时保持较好的准确性。精度可达亚像素级别,在不同设计高度信号弹的整个发光过程表现的中心定位能力稳定,具备较强的通用性,满足信号弹光斑的定位工作需要。此外,本方法对图像中不完整的信号弹光斑也具备定位能力,是一种可行的信号弹光斑中心定位方法。
4 基于高斯拟合的光斑中心定位


5 高度测量实验

6 结 语
猜你喜欢
北京航空航天大学学报(2022年6期)2022-07-02
中学生数理化·七年级数学人教版(2022年6期)2022-06-05
天津医科大学学报(2021年1期)2021-01-26
导航定位与授时(2020年5期)2020-09-23
铁道通信信号(2020年9期)2020-02-06
中国信息技术教育(2020年2期)2020-02-02
中国外汇(2019年20期)2019-11-25
阅读(高年级)(2019年9期)2019-11-15
VOGUE服饰与美容(2019年8期)2019-11-12
阅读与作文(小学高年级版)(2019年8期)2019-10-16
