
人体下肢能量收集与行走助力外骨骼分析与评价
2022-04-22 13:44周欣刘更汤运启韩冰刘晓丽
西北工业大学学报 2022年1期
周欣, 刘更, 汤运启, 韩冰, 刘晓丽
(1.西北工业大学 陕西省机电传动与控制工程实验室, 陕西 西安 710072; 2.西安航空学院, 陕西 西安 710077;3.陕西科技大学设计与艺术学院, 陕西 西安 710021; 4.西安市儿童医院, 陕西 西安 710003)
人口老龄化伴随着人体生理机能的衰退,导致四肢运动性和灵活性下降。 此外,由于疾病或事故导致运动能力受损以致偏瘫的患者越来越多,严重限制了活动能力[1]。如今,随着医学水平的不断进步与发展,虽然挽救了无数患者生命,但是会遗留严重的后遗症[2],最主要的是丧失独立自主的行动能力。研究表明,如果能及时有效地对患者进行康复训练,可以促进和恢复患者的运动能力[3]。
穿戴式康复外骨骼是一种依托康复医学,结合机器人技术而快速发展的产物,可以对患者进行物理康复治疗,生活运动辅助和机体功能恢复。康复外骨骼在人体运动的过程中实现功能增强或者代偿功能[4]。
下肢外骨骼是一种新型的可穿戴助力机器人,通过机械设备与肌肉骨骼系统协同工作。其主要作用是通过对人体关节施加驱动力,用于辅助老年人和残疾人行走、上下楼梯的康复[5]。
有源式外骨骼的驱动形式包含电机驱动、液压驱动和人工气动驱动等形式。例如哈佛大学研制的柔性踝关节外骨骼Exosuit[6],在人行走的过程中利用波登线将电机的输出扭矩转化为拉力,对患侧踝关节提供助力,减小相应的肌肉收缩强度。美国加州大学设计的下肢外骨骼BLEEX[7],采用了拟人结构设计,下肢采用液压驱动装置,增强负重能力。美国密歇根大学研发了一由气动肌肉驱动的踝部辅助外骨骼,利用肌电信号控制,用于康复训练[8]。
无源外骨骼经常采用储能元件进行驱动,例如Sawicki利用柔性传动设计了一款踝关节外骨骼,采用弹簧将行走过程中的重力势能转换为弹性势能进行收集[9]。Burton研发的背包式外骨骼[10],主要由缆绳和旋转发电机组成。从行走中获取机械能并转化为电能,同时降低人体代谢消耗。
目前,大多数下肢外骨骼是采用电机驱动、外骨骼沉重、价格昂贵、电池续航能力有限等缺点限制了推广与应用。由于人体蕴含丰富的能量,人们尝试从人体与周围环境中获取能量[11]。人在行走过程中,虽然动能和势能之间在不断进行转化,但是能量总是存在着损耗,并且主要以热能、克服外界阻力做功或关节内部软组织的磨损等形式消散。自然进化暂时决定了人体的结构和功能,但人类一直在探索提高能量利用效率[9]。
根据人体生理结构和运动特点,进行周期性储存和释放能量,将是一个很好的解决方案。本文提出一种人体下肢能量收集外骨骼,用于下肢运动功能障碍患者的康复训练和运动辅助。
1 人体下肢生物力学分析
1.1 人体下肢力学模型分析
人体的各种运动和呼吸动作都是通过骨骼肌来完成。骨骼肌是人体中最多的组织,占体重的40%。在骨骼和关节的配合下,通过骨骼肌的收缩和放松,完成各种身体动作。人体下肢自然行走,可视为一个下肢各关节周期性循环的运动过程。
在人体下肢活动过程中,肌肉通常会根据不同的动作阶段产生不同类型的收缩活动。人体的下肢主要由髋关节、膝关节和踝关节组成。从单侧下肢足后跟着地开始,到同侧下肢足后跟再次着地的过程是一个完整的步态周期。使用Opensim进行步态仿真[12],如图1所示。

图1 人体步态周期
建立下肢外骨骼的运动学数学模型,可以分析下肢外骨骼运动机理。根据人体下肢生理结构特点,下肢骨骼可假设为刚性连杆结构,各连杆之间通过关节连接构成多刚体链状结构。使用简化的行走下肢外骨骼的刚体五连杆模型,通过齐次变换矩阵与Jacobian矩阵分别对下肢外骨骼的运动位姿关系进行求解[13]。通过研究行走过程中系统各部分之间作用关系,确定下肢外骨骼各部位在广义坐标系下的空间位置。
如图2所示,对每根杆建立局部坐标系。1,2,3坐标系原点分别固定于站立腿的踝关节、膝关节、髋关节;坐标4,5,6的原点分别固定在摆动腿的髋关节、膝关节、踝关节处。其中,L为连杆的长度。

图2 下肢外骨骼五连杆模型
当人体行走时,通过运动学方程给出摆动脚在参考系中的坐标与关节角的关系。通过平移和旋转参考坐标系得到局部坐标系i(i=1,2,3,4,5,6)。根据相邻刚体连杆的2个局部坐标系的齐次变换矩阵,可以计算出末端执行器在参考坐标系坐标。
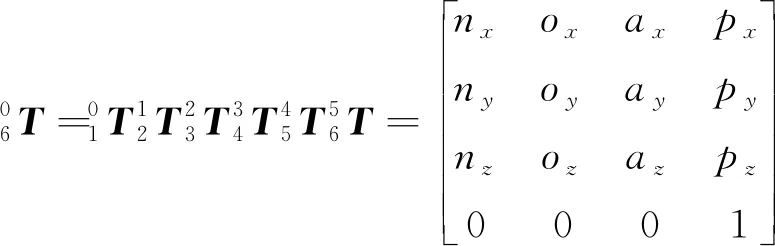
(1)

(2)
(3)
式中:ai为相邻两轴线i和i+1之间的距离;θi为绕轴从xi-1轴旋转到xi轴的角度,且顺时针为正。
摆动脚的空间位置与下肢髋、膝、踝关节的角度及左右大腿、小腿的长度有关。在人体步态分析中,步长Px通常定义为行走过程中两足跟或两足尖先后着地时前后方向的距离,步高Py通常定义为在脚离开地面最高的距离。
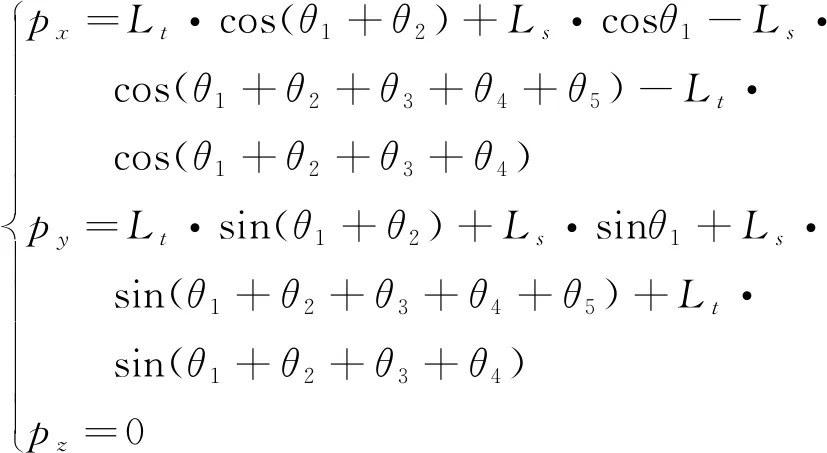
(4)
1.2 人体下肢步态测试与运动仿真分析
利用Vicon T40S光学运动捕捉系统进行步态测试实验,对人体下肢关节的运动进行分析。实验对象为一名男生,23岁,身高180 cm,体重65 kg。该受试者身体健康,无骨骼肌、神经等疾病,无手术史。在实验前,被告知了实验的目的和详细的过程,并在征得同意后开始进行实验[13]。
参考GB/T 10000-1988中国成年人人体尺寸[14]以及GB/T 17245-2004成年人人体惯性参数[15],取人体身高为180 cm,体重为65 kg为研究对象。鉴于人体自身组成的复杂多样,将人体进行抽象和简化成简单的刚性几何实体。
I=X0+X1M+X2H
(5)
式中:M表示自身质量;H表示身高,X0,X1,X2表示回归方程的系数。
通过UG建立人体下肢简化模型,选择Parasolid格式导入ADAMS。依次进行运动副设置、驱动设置、仿真检查、驱动函数设置、仿真环境设置后,仿真时间设置为0.87 s,仿真步数设置为1 000。
对人体下肢力学模型进行计算,获得步长与步高曲线。并在ADAMS仿真模型中,在踝关节处添加标记点,通过测量标记点与地面之间的距离,可以获得步高与步长曲线,如图3a)与3b)所示。
绝对坐标系的原点规定在支撑腿与地面接触的位置,当步长为负值时,表示摆动腿位于支撑腿的后面,步长为正值时,摆动腿位于支撑腿的前面。当左足离地时,步长为负,步长值约为-0.75 m。当左足击地时,步长为正,步长值约为+0.75 m。对步高而言,当左足离地时,摆动腿末端距离地面0.06 m左右。在行走过程中,摆动腿末端先降低后升高,在步态周期45%左右,上升至最高点,步高0.1 m。
在大腿处和脚踝处设置标记点,测量在行走过程中的两点距离变化曲线,如图3c)所示。结果表明,脚踝与大腿处两点之间的位置会随着人体行走,发生周期性的变化,两点距离变化可达0.1 m左右。
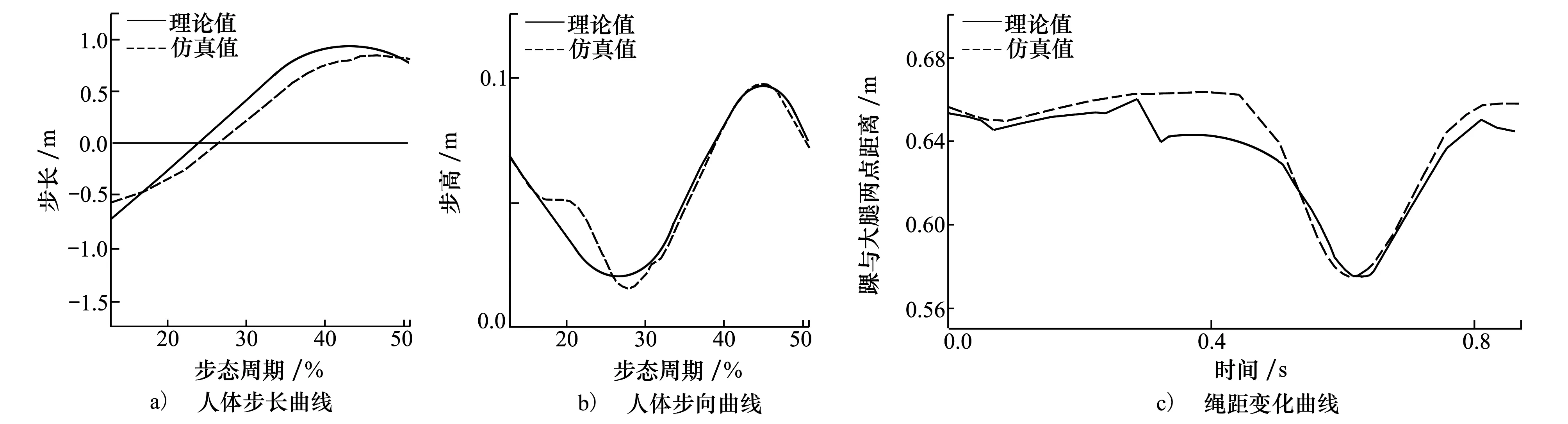
图3 人体下肢关节运动学曲线
2 外骨骼传动装置结构设计
人体在运动过程中,下肢支撑并推动身体向前,会产生大量的动能。在加速或减速时,下肢关节需要消耗人体能量。如果利用外部机构在下肢减速阶段将动能收集起来,降低能量消耗,可实现助力[16]。
对于健康人群,根据自身承受能力范围,选择合适刚度的卷簧进行储能。小腿和踝足靠自重,在下落的过程中,足以驱动卷簧,系统无需额外做功。于单侧下肢行走障碍的人群,患侧下肢由于长期依赖健侧下肢,患侧下肢运动功能衰退,肌肉萎缩,活性下降。而健侧下肢长期高负荷运动,造成身体重心偏移,步态改变,骨骼磨损加剧,但是健侧下肢肌肉能力较强。因此,对于该部分人群,在身体可以负担和接受范围内,关节驱动刚度较大的卷簧储存能量,付出额外做功,借助外骨骼实现能量收集与迁移,利用单侧下肢对患肢进行运动补偿。
外骨骼可以充分利用人体自身优势,收集人体下肢能量,用于患侧辅助运动,实现人体能量迁移的同时,达到人体平衡。通过外骨骼参与人体运动,使得患侧下肢加强锻炼,刺激患者中枢神经系统,重新掌握下肢的运动控制能力,并促进下肢肌肉群的协调运动,最终恢复运动能力。
在腿的伸展和摆动过程中,涉及到重力势能参与能量转换[17]。同时,两腿的步态周期存在一定的相位差,满足了跨肢体能量迁移的时间差。如果能将膝关节和踝关节在行走的过程中由关节产生的负功进行收集,经过能量管理,可在行走需要能量时进行释放,实现能量迁移,辅助下肢行走。外骨骼工作时,参与人体能量流动循环,主要包含3个阶段,如图4所示。
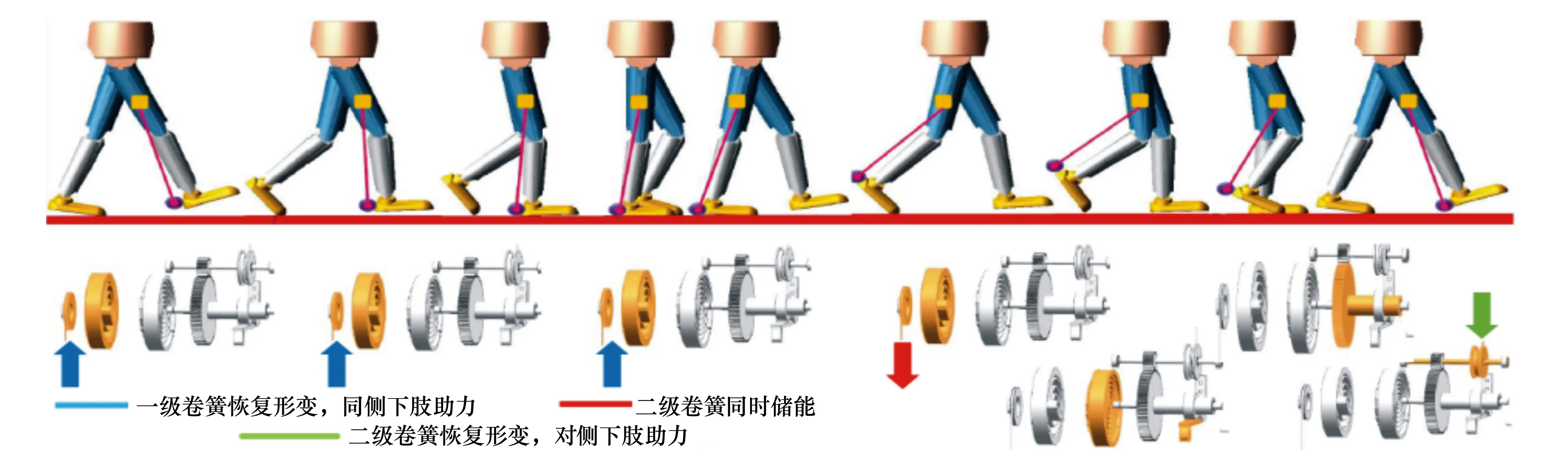
图4 外骨骼能量流动图像
人体能量收集器[18-19]安装在大腿外侧,传动结构主要包括二级平面卷簧、棘轮棘爪、摆动式平面凸轮、齿轮等。柔性穿戴结构包括支撑架与弹性波登线,如图5所示。充分发挥行走过程中步高变化,高效利用0.1 m左右的绳长变化,采用二级卷簧并联设计。在棘轮棘爪传动的同时,带动两级卷簧储能。一级卷簧能量从外端释放,用于下部分绳线收放,实现同侧相邻关节助力。借助凸轮控制,二级卷簧储存能量从内端释放,用于拉伸对侧踝关节,实现下肢对侧跨关节助力[20-21]。

图5 外骨骼传动结构图
相比于传统刚性传动外骨骼,本文设计的下肢可穿戴式能量收集与行走助力外骨骼具有以下优势:①借助绳索柔性传动,可以在下肢关节实现远距离动力传输,为跨肢体能量迁移提供了保障。②传动盒通过夹具固定在健侧下肢的大腿处,远离肢体关节,降低了外骨骼传动装置对于人体运动步态的干涉,同时降低了患侧下肢的负载。③外骨骼传动装置紧凑、轻巧,穿戴舒适、安全与便捷。
3 人体穿戴实验测试与评价
经过物理测试,表明外骨骼的功能满足要求[17]。进行人体穿戴实验,通过分析肌肉活性来更全面地评价外骨骼。考虑到肌肉的功能,肌肉表面的深度,肌肉位置。实验选择股直肌、胫骨前肌、股二头肌、腓肠肌外侧、腓肠肌内侧进行测试分析,评估外骨骼的助力效果。
采用Delsys无线表面肌电测试设备,用脱毛器去除皮肤表面的毛发,并用75%的医用酒精擦拭皮肤,随后打磨皮肤表面,去除皮肤角质层。电极放置方向与肌纤维方向平行,电极通过电极贴固定。为了防止肌电块在运动过程中松动脱落,使用皮肤膜包裹肌电块,记录表面肌电信号。
受试者在跑步机上行走,如图6所示。测试速度由跑步机控制,观察动态表面肌电信号波形及频率。受试者对本研究的研究内容与实验方案知晓,并签署知情同意书。同时本实验研究经西北工业大学医学伦理委员会审批(No:202102005)通过。

图6 人体穿戴外骨骼行走试验
将行走中各测试肌肉的肌电信号原始数据划分,提取单个步态周期,导入sEMG-Processing进行分析。将实验所得数据截取一个周期并进行滤波、整流和包络处理求得肌肉在一个步态周期内的活跃度变化,得到下肢肌肉在一个步态周期内的活动度与活动时序如图7所示。测试各下肢肌肉的表面肌电信号在支撑期均表现活跃。
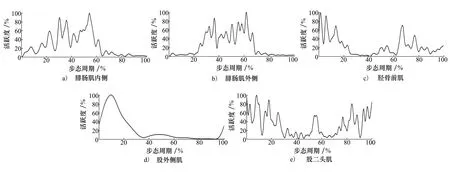
图7 不同肌肉表面肌电信号包络线
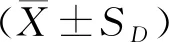
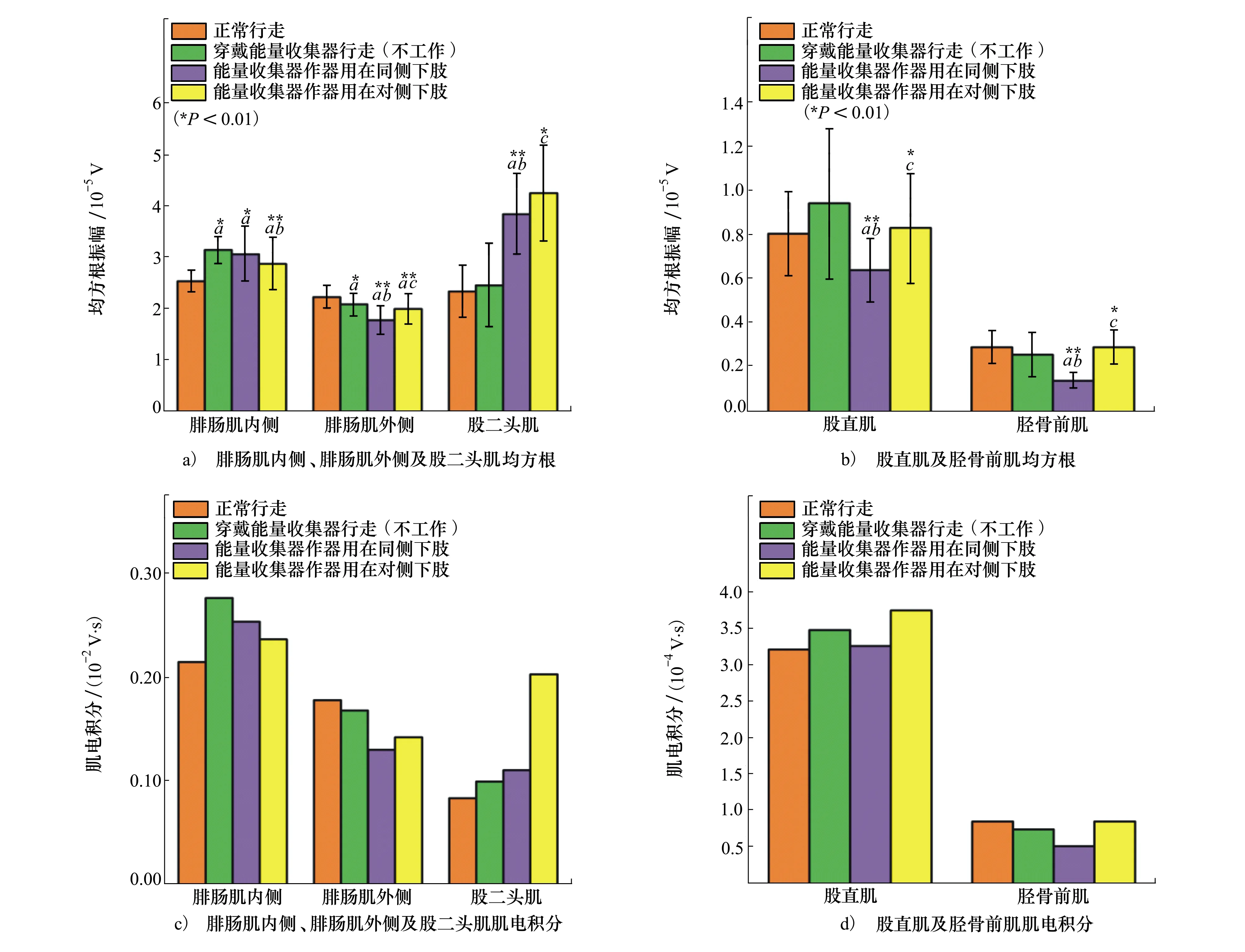
图8 下肢主要肌肉肌电信号的均方根值与肌电积分值
定义:正常行走组为M1,穿戴能量收集器行走(不工作)组为M2,能量收集器作用在同侧下肢组为M3,能量收集器作用在对侧下肢组为M4。a表示与M1区有显著差异,b表示与M2区有显著差异,c表示与M3区有显著差异。
均方根表示振幅的趋势,反映了一段时间内肌肉放电的平均水平,为放电的有效值。均方根越大,肌肉力量和张力越高。肌电积分是对肌电信号进行整流滤波后得到的时间曲线下面积之和,反映肌电信号的强弱变化,是评价疲劳的重要手段。
对下肢所选肌肉进行肌电测试,结果显示当受试者仅穿戴外骨骼行走(外骨骼不工作),除腓肠肌外侧和胫骨前肌外,大部分肌电信号都略有增加。这是因为外骨骼是身体的外部结构,它会导致额外的肌肉代谢做功,并在走路时消耗能量。
穿戴外骨骼行走后,腓肠肌内侧,腓肠肌外侧,胫骨前肌,股直肌四组肌肉在单侧下肢进行能量收集和释放,肌肉的肌电信号时域指标均有下降,其中股直肌的均方根值,最高降幅可达10%。腓肠肌外侧肌肉的肌电积分值降幅最明显,可达12%,对下肢的影响作用较为明显。
股二头肌的均方根与肌电积分值均上升,一方面股二头肌距离膝关节与踝关节相对较远,另外这可能与下肢肌肉之间的相互作用有关,这有待进一步科学实验与分析。另外,外骨骼对肌肉的影响效果还应广泛增加实验样本,下一步尤其是增加不同程度的下肢运动障碍患者的样本数量。综上所述,穿戴外骨骼行走时,可以降低部分主要肌肉活性。
4 结 论
本文为下肢运动障碍患者提供一种辅助行走解决方案。利用弹性储能可收集下肢关节的能量,获得较大的机械能,并且参与能量管理与释放,为下肢运动障碍患者提供单侧下肢辅助,实现能量迁移。
原理样机经过物理测试,结果表明外骨骼为对侧腿提供辅助拉力。本文通过人体穿戴实验进行功能评价,结果表明,外骨骼可以降低部分肌肉的力量和活性,具有一定的助力效果。相信随着后续研究工作的不断完善,将会提出更加高效的人体能量收集器,更加科学规范的评价标准,为患者的健康行走,贡献一份力量。
猜你喜欢
现代仪器与医疗(2022年4期)2022-10-08
现代仪器与医疗(2022年4期)2022-10-08
包装工程(2022年10期)2022-05-27
无线互联科技(2020年12期)2020-09-03
科学大观园(2019年10期)2019-09-10
轻兵器(2019年5期)2019-06-21
中国经济周刊(2019年9期)2019-05-24
科学之谜(2018年4期)2018-09-17
——中国制药企业十佳品牌
西部大开发(2017年5期)2017-07-05
现代兵器(2017年4期)2017-06-02
