
路面典型局部变形激励下的振动舒适性评价
2022-04-21 09:57郭雄峰
西南交通大学学报 2022年2期
郭雄峰 ,陈 长 ,冯 奇
(1. 上海市城市建设设计研究总院(集团)有限公司, 上海 200125;2. 同济大学道路与交通工程教育部重点实验室,上海 201804)
行驶舒适性与路面的平整程度、车辆状态、运行速度等方面密切相关,被广泛认为是路面服务性能评价的重要参考指标. 路面的不平整激励是引起汽车振动并导致舒适性下降的核心因素,道路表面横向、纵向、水平向的各种波长及幅值的复杂变形组合构成了路面的不平度[1]. 作为激励源,不平度的连续变化会引起车辆的随机振动,局部突变则会引起车辆的瞬态振动,二者共同作用,通过车身悬架系统传递至人体,最终引起其心理和生理上的舒适性感受变化.
国际上用于评估行驶舒适性的指标众多,例如舒适度指数(ride number,RN)、国际平整度指数(international roughness index,IRI)、行驶质量指数(riding quality index,RQI)以及加权加速度均方根(weighed root-mean-square acceleration,WRMSA)等. 利用这些评价指标,现有文献研究集中在宏观层面的路段行驶质量和人车振动特性进行分析[2-4],但对于路面局部变形(如桥头差异沉降、坑槽、窨井沉陷)导致的冲击振动问题却鲜有涉及.
已有研究表明路面局部变形引起的冲击振动对行驶舒适性具有显著影响[5-6],但尚未明确其中的定量关系,部分文献也提出过路面中桥头差异沉降及窨井沉陷等局部变形的控制阈值[7-9],但是缺乏有效的理论支撑. 另有文献提出以较短长度作为行驶质量评价单元能够更加准确地描述路面的服务性能[10],但是较短的单元长度可能会造成路面波长截断现象[2],导致评价结果失真. 由于路面局部变形随机存在于路面中,且其导致的振动具有瞬时性特点,因此,难以通过现场试验获取变形激励与振动感受之间的定量关系.
鉴于此,本文从理论上研究局部变形对舒适性的影响. 首先,建立典型路面局部变形简化模型作为振动激励源,基于两自由度车辆强迫振动模型,从理论上推导出振动模型中簧上质量位移和加速度时间历程函数,再根据ISO 2631-1[11]中的频率加权系数分布特点设计频率加权滤波器对竖向加速度进行滤波,求解不同工况下的均方根加速度,评估人体的振动感受,最后提出不同类型局部变形的评价标准,以期为路面精细化养护管理提供依据.
1 路面局部变形纵断面形式假定
文献[2, 12]对上海城市道路进行详细调研发现,引起道路纵断面高程局部异常波动的不平整因素主要是窨井变形、桥头差异沉降、路面修补等,各类因素的统计结果如图1所示.
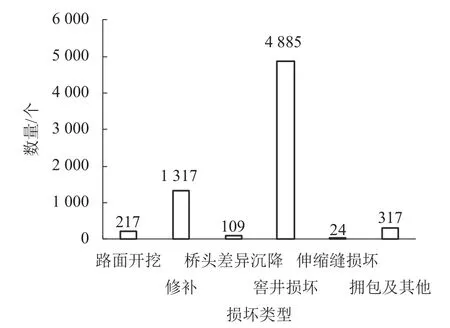
图1 路面局部变形因素统计Fig. 1 Statistical factors of local deformation in pavement
由图1可知,窨井损坏和修补(包括路面开挖回填)是最主要的变形形式,其次是桥头差异沉降. 但是,实际路面中路面修补一般面积较大,且对行车影响十分有限;路面开挖则一般为临时性养护管理;另外,由于轮胎存在包络特性,伸缩缝问题也不具显著影响. 为进一步研究变形的影响,本文根据其余常见局部变形的形态特征,将其分为3类:
1) 错台型,描述同一断面的高程突变,如桥头差异沉降;
2) 双断面型,描述路面规则的凹凸变形,行进中的轮胎会在极短时间内经过变形区域的两端,如窨井沉陷或拱起;
3) 曲面型,描述路面较均匀的凸起,如路面拥包等.
建立激励模型需首先假定各类局部变形的函数形式,由于路面局部变形处纵断面高程一般具有突变特性,传统简谐函数难以描述其断面特点,因此对3类变形进行简化(如图2所示),以高差 Δg作为变形衡量指标,纵断面高程y(t)如式(1)~(3)所示.
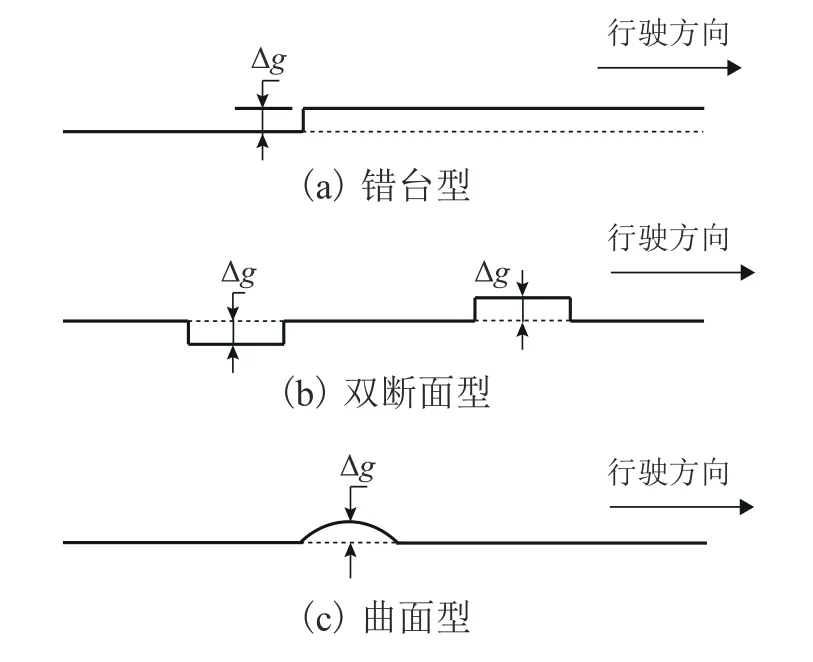
图2 典型路面局部变形纵断面示意Fig. 2 Profile diagrams of typical local deformation
1) 错台型

式中:l为变形部分长度;t为时间;v为车速.
2) 双断面型

式中:d为凹凸部分直径或长度.
3) 曲面型

2 人体竖向位移及竖向加速度推导
振动舒适性评价一般以加速度为基础指标,已有研究中加速度多为现场实测值,不同车辆之间难以对比. 本文通过两自由度车辆强迫振动模型的求解,从理论上推导人体的竖向位移和加速度响应.
2.1 两自由度车辆强迫振动模型
为统一各国的平整度度量标准,世界银行曾在巴西进行了大量平整度试验(international road roughness experiment),试验中首次构想出两自由度1/4理想车模型[13],由于理想车的运动方程恒定,固定车辆参数后,相当于利用同一辆车在任意地方行驶,因此,其测试方法具有很好的移植性. 1/4车模型如图3所示,图中:ms为簧上质量,mt为簧下质量,Ks为悬架刚度系数,Kt为轮胎刚度系数,Cs为悬架阻尼系数,Zs和Zt分别为簧上质量和簧下质量的绝对位移.

图3 1/4车模型Fig. 3 Quarter car model
运动方程为
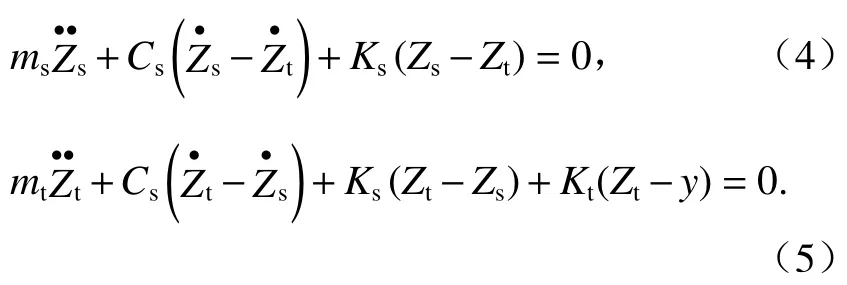
将式(4)、(5)等式左右两侧同时除以ms,得
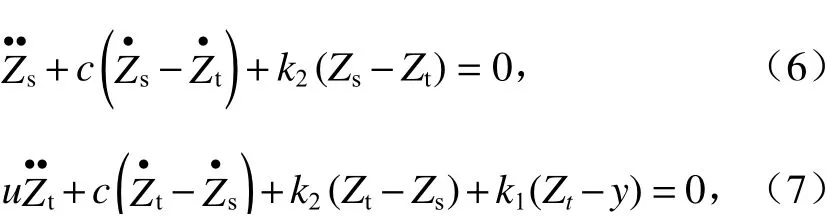
式中:系数c=Cs/ms=6.00s−1; 系 数u=mt/ms=0.15;系数k1=Kt/ms=653s−2;系 数k2=Ks/ms=63.3s−2.
2.2 任意路面变形激励下人体竖向位移的时域函数
路面局部变形对两自由度车辆振动系统的激励不具有简谐特性和周期特性,在这种激振作用下,系统通常仅有瞬态振动,故为求得加速度的时域函数,可以采用卷积积分法[14]求解簧上质量的加速度响应,具体过程如下:
1) 求解1/4车振动系统对于单位脉冲激励 δ(t)的响应函数;
2) 利用卷积积分法求解路面局部变形激励作用下的系统响应.
簧上质量的竖向位移可近似认为是人体的竖向位移. 由于运动方程存在耦合,故需要对方程进行解耦,运动方程如式(8)所示.式中:M、C、K、Z、Y分别为质量矩阵、阻尼矩阵、刚度矩阵、位移矩阵、输入矩阵,
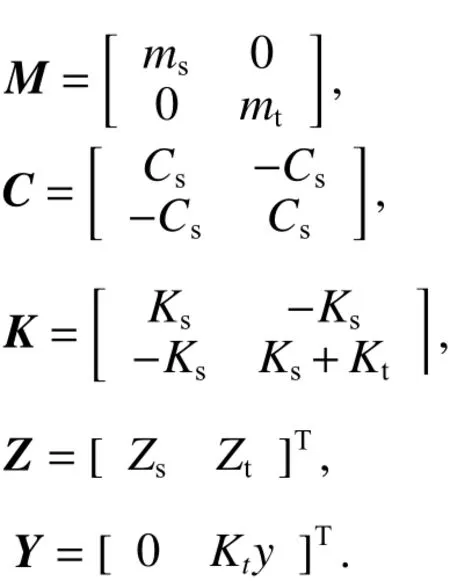

运动方程中阻尼矩阵无法通过实模态变换实现对角化,因此采用复模态变换求解[15]. 首先,令式(8)Y=0 得到自由振动方程,设特解为 µeλt,µ、λ分别为特征向量和特征值,可求解振动系统的特征方程为

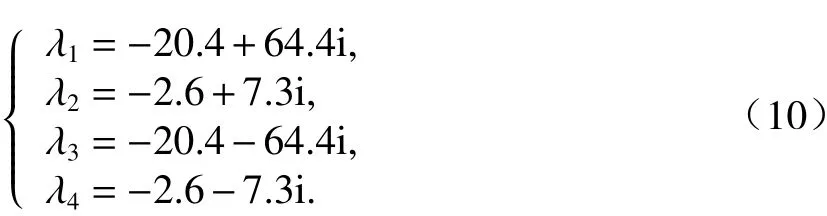
二自由度系统存在4个特征值,且为2对共轭复数. 将1/4车模型参数代入特征方程可得4个特征值分别为

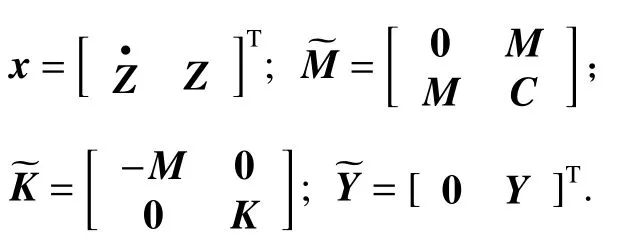
由于上述复模态矩阵无法直接变换,因此这里引入状态变量x对方程解耦[15],补充恒等式将运动方程转换为状态方程:

式中:
特征向量构成复模态矩阵:

V具有关于和的加权正交性,满足

式中:Vi为矩阵V的第i个列向量.

将式(10)、(11)代入式(15),求得

当初始输入为单位脉冲信号,式(15)化简为

式中:pi为响应列阵中第i个值.
式(17)等式两边取跨零积分,得

式中: ε为极小量.
得到系统的单位脉冲激励响应为

利用卷积积分方法,可求得在任意激励Kty(t)下的响应为
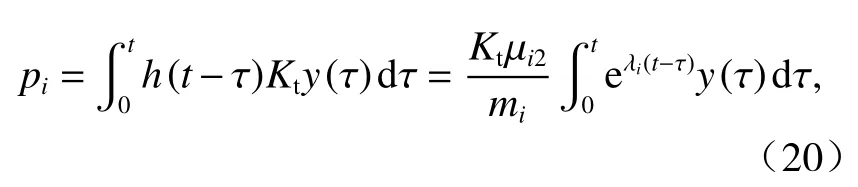
代入x=Vp得到
可得
Zs即为y(t)激励下的人体竖向位移.
2.3 局部变形激励下的人体竖向加速度
由式(22)可知:人体竖向位移的变化振动与系统的参数及路面激励相关,1/4车模型参数固定后,位移则是路面激励的函数. 对位移求二阶导数可以得到加速度函数[16],下面分别推导3类典型局部变形激励下的加速度响应.
2.3.1 错台型
车辆在经过错台型变形会经历两个阶段,以桥头跳车为例,第一阶段为驶上但是未离开桥面,第二阶段为驶离桥面. 车辆经过两处错台,引起两次跳车. 但是,实际桥梁具有一定长度,汽车经过第一处错台导致的加速度响应会在短时间内衰减为0,而此时车辆仍未驶下桥面,故每次错台视作为一处变形. 考虑驶上错台的加速度时间历程,即 0 ≤t≤l/v,联立式(1)、(22)求解得
对其求二阶导数,得到竖向加速度为
2.3.2 双断面型
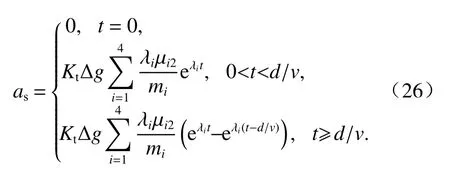
双断面型变形的长度一般较小,例如窨井的直径一般仅为0.5 m左右,导致车辆驶过瞬间会连续经过变形两端,且间隔时间极短,两次振动响应会发生叠加,所以车轮驶上驶下变形的两次冲击都需要考虑在内,加速度响应为分段函数,联立式(2)、(22)求解,结果如式(25)所示.
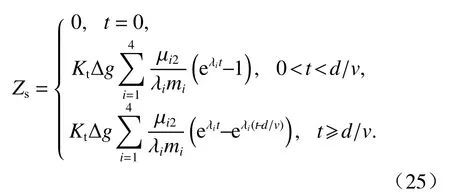
对式(25)求二阶导,得到竖向加速度为
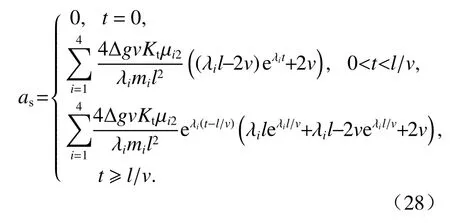
2.3.3 曲面型
此类变形断面为平滑曲线,在变形长度较大时,振动响应会减弱. 联立式(3)、(22)求解,结果如式(27)所示. 同理可得竖向加速度结果如式(28)所示.

3 基于频率加权的振动舒适性评价
局部变形激励导致的人车振动为瞬时冲击,不具周期性特征,ISO 2631-1[11]推荐采用运行均方根法来评价这种路面偶然激励导致的振动感受,其形式为

式中:t0为瞬时激励发生时刻;τ0为持续时间;aw(t)为瞬时频率加权加速度.
欲求aw(t),需要对竖向加速度的时域值进行频率加权滤波. 由第2节可知,竖向加速度时域值与行车速度、变形长度、变形高差相关,因本文主要研究不同类型局部变形引起的人体振动,故先统一车速和变形长度两个变量. 根据现行城市道路规范[17],道路设计速度为20~60 km/h,本文车速取40 km/h;实际路面中双断面型变形多表现为窨井的凸起或沉陷损坏,窨井的直径一般为0.6~0.7 m[2],本文取0.6 m.
3.1 频率加权滤波器设计
人体对不同频率的振动敏感程度不同,一般认为0.5~80.0 Hz是振动舒适性评价的考虑范围,竖向振动频率加权函数[18]为
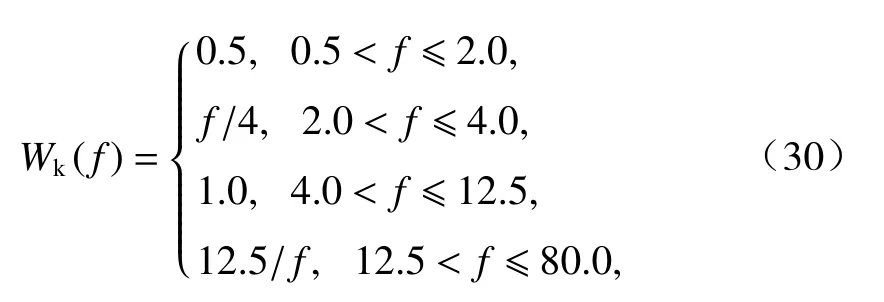
式中:f为竖向振动频率.
Wk在低频段和高频段均呈现抑制性,而在中间频段则具有较好的通过性,所以可以设计带通滤波器进行频率加权滤波. 因运行均方根计算对加速度相位要求不高,故采用IIR (infinite impulse response)数字滤波器设计,并借助MATLAB信号处理工具箱完成. 巴特沃斯滤波器原型具有通带内最大平坦和随频率升高而单调递减特性,与标准中的Wk具有较高契合度,因此本文采用巴特沃斯带通滤波器.
数字滤波器通过间接法设计,步骤如下:
步骤1确定数字滤波器技术指标;
步骤2将数字滤波器技术指标转换为模拟低通滤波器技术指标;
步骤3设计模拟低通滤波器(滤波器原型);
步骤4通过频率转换,将模拟低通滤波器转变为模拟带通等滤波器;
步骤5模拟滤波器数字化.
由MATLAB中buttord函数先确定滤波器阶数,再由buttap函数设计出滤波器原型,并借助lp2bp函数实现模拟低通至模拟带通的转换,最后由bilinear函数完成数字化.
根据Wk渐近线形式,频率加权函数在4.0~12.5 Hz,权重保持为1,考虑巴特沃斯滤波器的过渡特性,试算后取通带范围为2.5~18.0 Hz,通过上述过程可最终设计出频率加权函数滤波器,本文同时设计了一个对比滤波器,两者的区别在于阻带最小衰减量不同. 设计滤波器的幅频特性与ISO 2631-1[11]中的频率加权函数对比如图4所示.
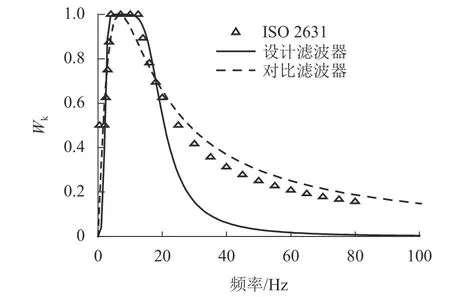
图4 竖向加速度的频率加权曲线Fig. 4 Frequency weighting curves of vertical acceleration
图4可见,设计滤波器在高频段具有一定误差,但在25.0 Hz以下人体最敏感的低频段吻合度高,且在80.0 Hz之后迅速衰减为0,而对比滤波器则与之相反. 考虑到路面局部变形的激振频率主要为低频振动(如图5),高频段的权重实际意义不大,即保证通带频率范围的特性更为关键,因此,本文设计的带通滤波器适用性更高.

图5 竖向加速度频谱Fig. 5 Spectrum of vertical acceleration
3.2 3类局部变形激励作用下振动舒适性评价
因局部变形高差与时间变化无关,可视为固定系数,因此,将代表性车速和变形长度代入式(24)、(26)和式(28)可得竖向加速度的时域函数,通过带通滤波器后可得到瞬时频率加权加速度,频率记权前后的加速度变化情况如图6所示.
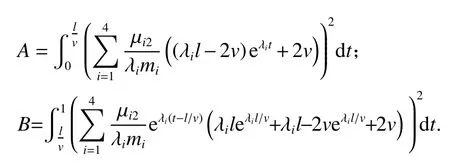
根据运行均方根的定义,通过数值积分方法计算得到3类局部变形作用下的均方根加速度,如式(31)~(33)所示. 其中,加速度持续时间取为1 s[11].
1) 错台型
2) 双断面型
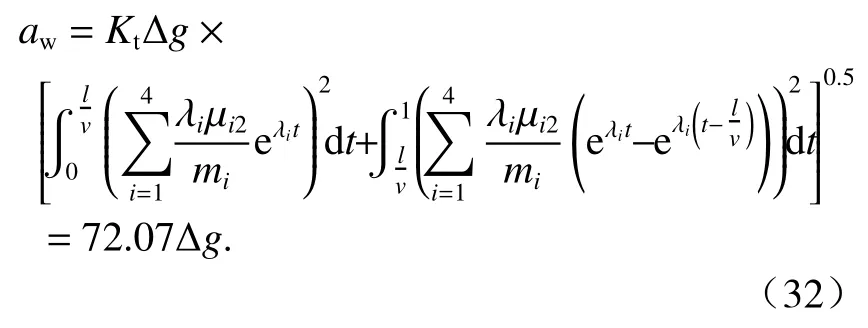
3) 曲面型
式中:
变形高差与均方根加速度之间的理论关系如图7所示. 结合ISO 2631-1[11]给出的舒适度评价标准,本文计算出的局部变形评价标准如表1所示.当错台型、双断面型及曲面型局部变形分别达到4.76、2.78、3.26 cm时,行驶质量均达到极不舒适.
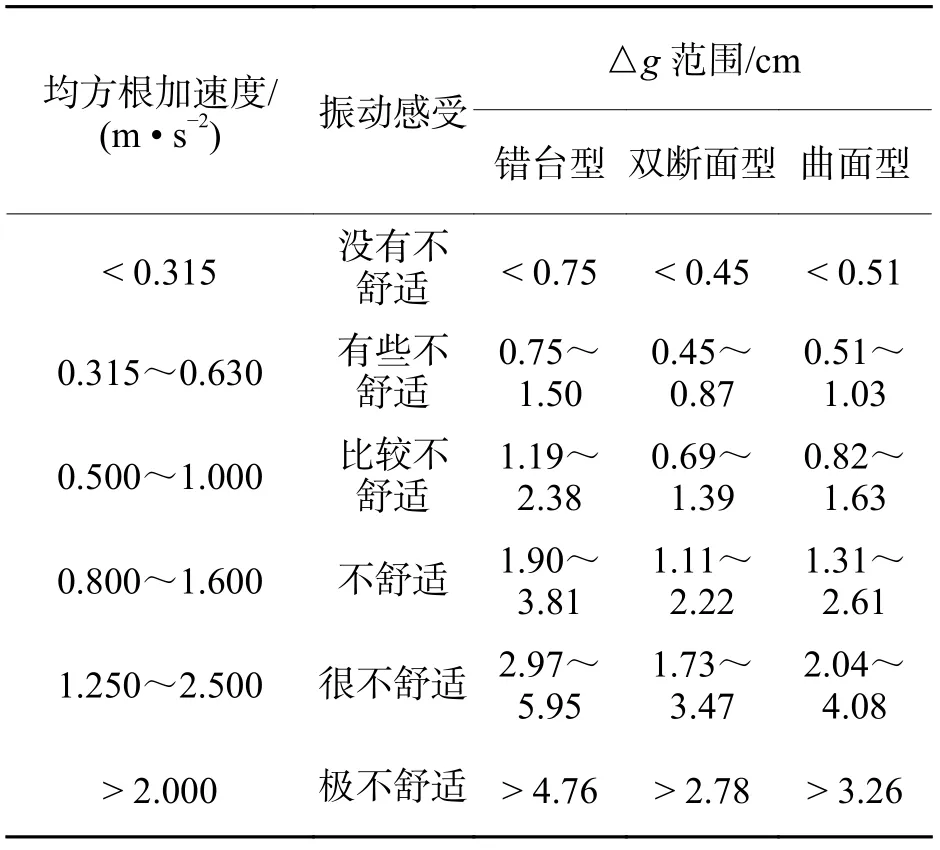
表1 局部变形高差评价标准Tab. 1 Evaluation criteria for height difference of local deformation
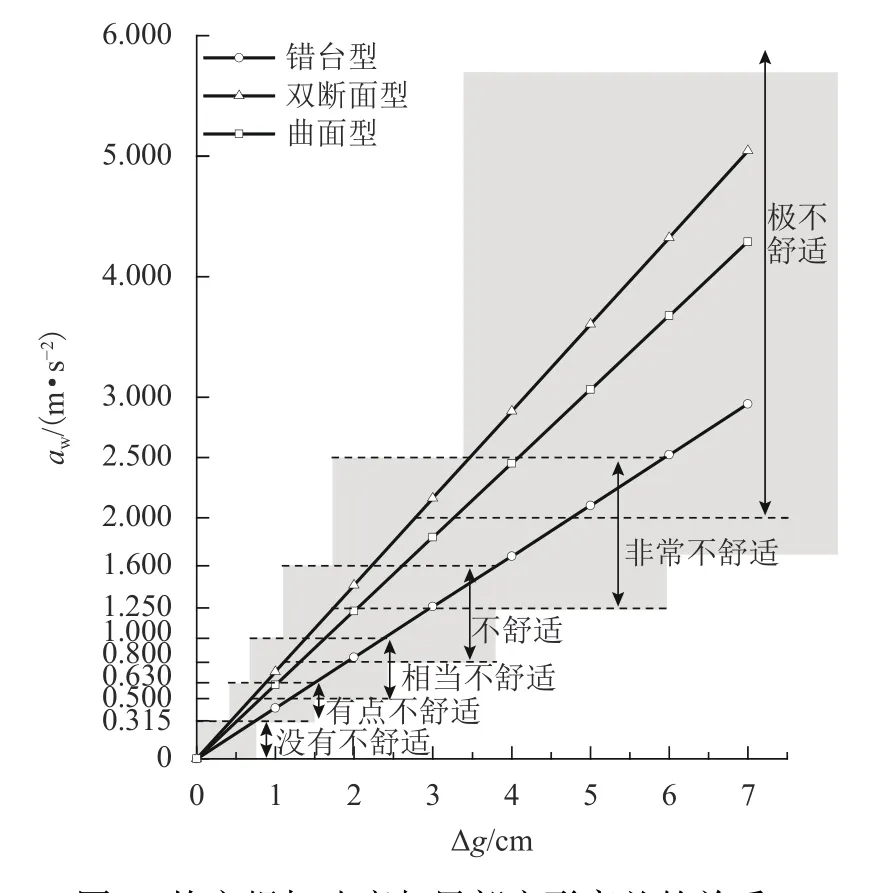
图7 均方根加速度与局部变形高差的关系Fig. 7 Relationship between root-mean-square acceleration and height difference of local deformation
综合上述分析,3类局部变形激励作用时的均方根加速度均和变形高差呈正比关系;在典型行驶车速40 km/h和变形长度0.6 m情况下,同样的变形高差作用,双断面型对人体舒适性影响最强烈,曲面型次之,错台型影响相对最小. 值得注意的是,实际路面中,曲面型变形多表现为路面拥包等损坏,长度不一. 当式(33)中局部变形长度l较大时,均方根加速度aw的比例系数会减小,如图8所示. 本文所取的0.6 m变形长度几乎为曲面型变形的最不利长度,当长度约为0.3 ~ 1.5 m,同等高差时曲面型影响大于错台型,路面养护管理中应当重点考虑该长度范围.

图8 变形长度与比例系数的关系Fig. 8 Relationship between length of deformation and evaluation coefficient
4 结 论
1) 对路面中常见的局部变形形式进行分析总结,建立了错台型、双断面型和曲面型3类典型局部变形的纵断面模型.
2) 求解两自由度汽车强迫振动模型,推导出任意路面变形激励作用时人体竖向位移的时域变化函数;根据3类局部变形的纵断面特征从理论上得出人体竖向加速度的时域解,并对函数式中变形长度和行驶车速两个参数作出合理假定.
3) 依据ISO 2631-1评价标准中竖向加速度的频率加权系数分布,设计了频率加权函数数字带通滤波器;对3类局部变形激励下的竖向加速度信号进行滤波,得到瞬时频率加权加速度并求解出均方根加速度;最后根据标准中舒适度划分方法确定了基于舒适性的3类局部变形评价标准. 结果表明:3类局部变形激励作用下,均方根加速度均与局部变形高差呈正比关系,同等变形程度下,双断面型变形的行驶不适度最高.
4) 路面养护管理中,可结合高精度检测设备及时获取路面严重错台型及双断面型局部变形的位置,做好养护和修复工作,提高路面服务性能和寿命.
5) 文中研究结果适用于城市道路沥青路面,城市道路水泥路面可以参考;对于公路路面中的类似问题,需要做进一步的研究.
猜你喜欢
客联(2022年4期)2022-07-06
当代水产(2022年6期)2022-06-29
成都信息工程大学学报(2022年2期)2022-06-14
飞天(2019年6期)2019-07-08
电子制作(2019年11期)2019-07-04
汽车观察(2018年12期)2018-12-26
金桥(2018年4期)2018-09-26
劳动保护(2018年8期)2018-09-12
新高考·高二数学(2015年2期)2015-05-27
新高考·高二数学(2014年7期)2014-09-18
