
基于N-K模型的水上交通事故触发过程及风险因素耦合研究
2022-04-21 12:42马建文黄子硕
重庆交通大学学报(自然科学版) 2022年3期
马建文,王 波,黄子硕
(1. 山东交通学院 航运学院,山东 威海 264200; 2. 上海海事大学 商船学院,上海 201200;3. 山东交通学院 航运安全与管理大数据发展创新实验室,山东 威海 264200)
0 引 言
水上交通事故是制约水运经济发展的重要因素。水上交通系统是由人、船、环境、管理等多种要素构成的复杂动态系统,具有动态性、模糊性及突变性,这决定了水上交通事故具有多因素耦合的致因特点。研究水上交通事故触发过程与多因素耦合作用,分析风险因素之间的关联、规律及趋势等问题,对提高水上交通事故风险预控水平具有积极的理论意义和实践指导作用。
对水上交通事故致因及机理分析已经取得了一些研究成果。陈伟炯[1]提出了船舶营运安全的“人-机-环境-管理”理论,为海上交通事故的全面系统分析奠定了基础;刘正江等[2]采用灰色管理分析法对船舶碰撞事故中涉及的人为因素进行了识别和分析;HU Shenping等[3]在综合评估方法基础上,采用模糊函数构建了MRRA模型,在海事评估中取得了较好的效果;T.CHAI等[4]考虑了船舶所有可能发生的碰撞事故的频率和后果,研究开发了一种定量风险评估(QRA)模型,用于评估船舶碰撞风险;A.C.KUZU等[5]采用模糊故障树分析法(FFTA),对船舶系泊作业事故进行了系统的风险分析和定量评价。该阶段的研究主要是将水上交通事故致因因素作为离散的独立事件进行研究,对事故风险关联研究主要侧重于风险评价上,对风险演化规律和耦合关系研究还较欠缺。
近年来,系统仿真技术和机器学习算法等在水上交通事故风险评估中得到广泛应用。胡甚平等[6]引入云理论,对环境的不安全条件、船员的不安全行为和船舶的不安全状态3个因素引发的水上交通事故耦合机理进行模拟,得到海上交通系统风险演化机理与多因素耦合规律;陈亚东[7]利用贝叶斯网络对内河船舶碰撞的人为因素进行分析,得出影响内河船舶碰撞中的致因链,得到了因人为因素事件导致的船舶碰撞概率大小;J.ZHANG等[8]采用贝叶斯和最小二乘算法,对引起船舶碰撞事故的主要因素进行了定量计算;P.CHEN等[9]基于碰撞船舶的AIS数据,采用Credal网络理论构建了船舶碰撞事故因果关系模型图,对相遇局面下发生船舶碰撞的关键因素和概率进行了分析。该阶段的研究成果利用人工智能算法对海上交通风险进行了推理和仿真评价,但算法对数据的准确度和精度要求非常高,计算过程复杂,在水上交通系统数据缺少的情况下,难以获取满意的结果。
N-K模型是解决复杂系统问题的通用模型[10-12],对系统内部因素的关联及耦合程度分析准确,已成功应用于航空[11]、道路[12]、铁路[13]、复杂事故[14]等领域的系统风险分析研究中。笔者利用耦合风险理论探析水上事故触发过程,并借助N-K模型定量分析事故中各风险因素间的强弱耦合关系,以便提高水上交通事故风险预控水平。
1 风险耦合及事故触发过程
水上交通事故风险耦合是指2个及以上的风险因素,通过各种关联相关作用改变海上交通系统风险的局部或整体状态,导致事故发生。
1.1 风险因素识别
在文献[1]提出的“人-机-环境-管理”理论基础上,综合文献[15]~文献[18]对水上交通系统风险因素的分析,将水上交通系统中的风险因素总结如表1。
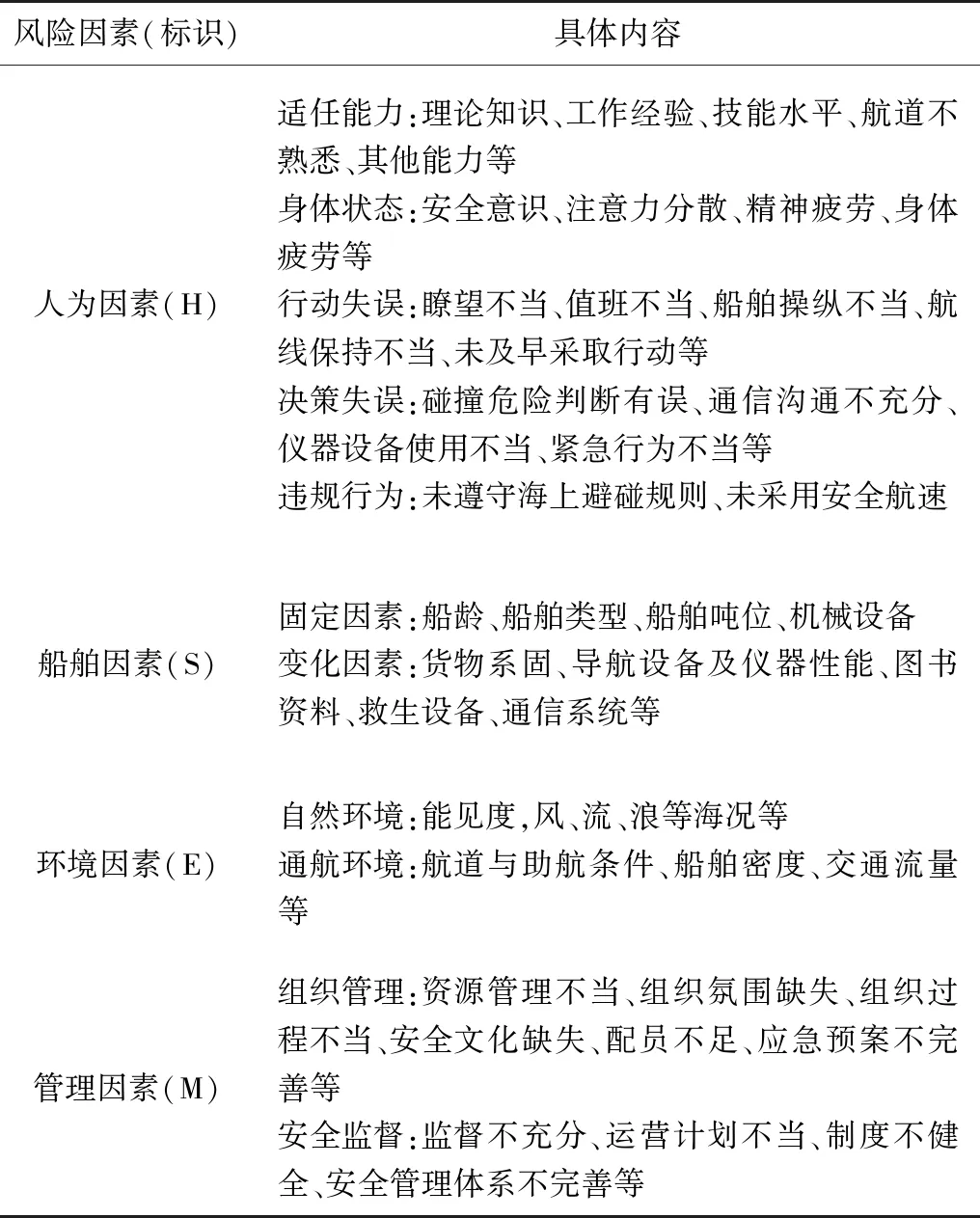
表1 水上交通系统风险因素Table 1 Risk factors of marine transport system
1.2 事故触发过程分析
从复杂系统理论视角,明晰水上交通系统风险因素耦合触发事故的发生过程,对预控水上交通事故极其关键。借鉴其他交通运输领域[13-14]分析事故风险因素耦合演化机理常用的触发器原理,得到水上交通事故触发过程,如图1。
图1中,T为某起水上交通事故演化周期;P(t1)为t1时刻触发的子系统风险因素脉冲;P(t2)为t2时刻触发的系统耦合风险因素脉冲;DH(t1)为t1时刻人为因素子系统的风险阈值;DS(t1)为t1时刻船舶因素子系统的风险阈值;DE(t1)为t1时刻环境因素子系统的风险阈值;DM(t1)为t1时刻管理因素子系统的风险阈值;D(t2)为t2时刻水上交通系统综合防御系统阈值。

图1 水上交通事故风险因素耦合触发过程Fig. 1 Coupling triggering process of risk factors of marine traffic accidents
水上交通运输与其他运输相比,受国际公约标准、航运市场等宏观的外部因素影响较大,且外部因素对水上交通系统的中的人为、船舶、管理及环境(航道)等内部因素风险的触发有直接推动或约束影响。具体风险耦合演变过程描述如下:
1)t1时刻触发了其中一个风险因素脉冲P(t1),由于水上交通系统具有自我调整和自组织能力,会激活4个子系统各自的防御系统,若:
P(t1)≤min {DH(t1),DS(t1),DE(t1),DM(t1)},
∀t1∈T
(1)
说明防御系统缓冲了风险因素干扰,P(t1)未突破各子系统的防御系统,系统处于安全状态。若:
P(t1)>min{DH(t1),DS(t1),DE(t1),DM(t1)},∀t1∈T
(2)
说明风险因素脉冲P(t1)已突破了综合防御系统中风险阈值最小的子系统的防御系统,系统状态将被打破。
2)子防御系统被突破后,各风险因素开始由静态演变为动态,并在水上交通事故致因链上蔓延,形成了系统耦合风险因素脉冲P(t2)。P(t2)在耦合振荡器的作用下,形成系统耦合风险,威胁水上交通系统的综合防御系统。若P(t2)>D(t2),说明耦合风险的强度、持续时间等超过了综合防御系统的承载能力,导致系统风险增强或触发新的风险产生;反之,系统处于安全状态。
2 事故风险耦合N-K模型
N-K模型起源于信息理论,包含两个参数N和K。N是指构成系统要素的个数,K是指系统中相互依赖关系的个数,其中0≤K≤N-1。假设子系统间有n种交互方式(状态),则总的交互组合方式有nN种[10]。
水上交通事故系统中(图1),根据P(t1)是否能突破子系统各自的防御系统,用n=0表示未突破防御系统,n=1为突破防御系统。通过计算水上交通事故系统中4个子系统风险因素间的交互信息,评价耦合作用下引发新风险的难易程度。
通常认为,某种风险因素耦合引发事故的次数越多,该风险耦合方式越容易发生,导致事故发生的概率越大。水上交通事故风险耦合交互信息I(H,S,E,M)表达式有:
(3)
式中;pijkl为人处于第i种状态、船舶处于第j种状态、环境处于第k种状态、管理处于第l种状态下,4种子系统风险因素耦合发生的概率,其中i,j,k,l∈{0,1};I(H,S,E,M)下标中,H为人为因素,S为船舶因素,E为环境因素,M为管理因素,下标个数为因素耦合的数量;I值越大,系统风险越高;pi、pj、pk、pl分别为子系统在各自状态下的变化风险概率,其中:
(4)
pj、pk、pl的计算方式类似pi。
在风险耦合中,单因素风险耦合一般视为多因素风险耦合的特例,无法利用交互信息表达式计算,因此只对双因素及多因素耦合模型进行构建。
建立水上交通事故系统双因素耦合模型I2,共6种组合,如式(5):
(5)
水上交通事故系统3因素耦合模型I3,共4种组合;水上交通事故系统4因素耦合模型I4,共1种组合。模型分别为式(6)、式(7):
(6)
log2[pijkl/(pi·pj·pk·pl)]}
(7)
3 实证分析
3.1 数据选取
为了全面对水上交通事故风险因素触发过程进行分析,根据国际海事标准公约、国内政策法规等宏观外部因素的变化,综合考虑事故数据的时间跨度、数据来源的可靠合理性及事故调查报告的完整性等因素,随机筛选我国各级海事局网站公布及海事局提供的2012年1月—2019年8月的水上交通事故调查报告,得到不同水域、不同季节条件下的共计224份报告,整理得到如表2的数据库,用作样本数据实证分析。

表2 选取的水上交通事故样本数据(部分)Table 2 Data of the selected marine traffic accident samples (Part)
根据表2的统计结果,分析可得2012年1月—2019年8月期间我国水路交通事故风险耦合次数及频率,如表3。表3中,n1000、p1000分别表示只有人为单因素参与耦合时事故发生的次数、频数,人为因素、船舶因素、环境因素、管理因素多因素耦合事故发生次数、频数以此类推。

表3 2012年1月—2019年8月我国水路交通事故风险耦合次数及频率Table 3 Risk coupling times and frequency ofmarine traffic accidents in China from January2012 to August 2019
3.2 耦合风险值计算
根据表3,首先计算不同因素耦合情况下发生的风险概率,如表4~表6。
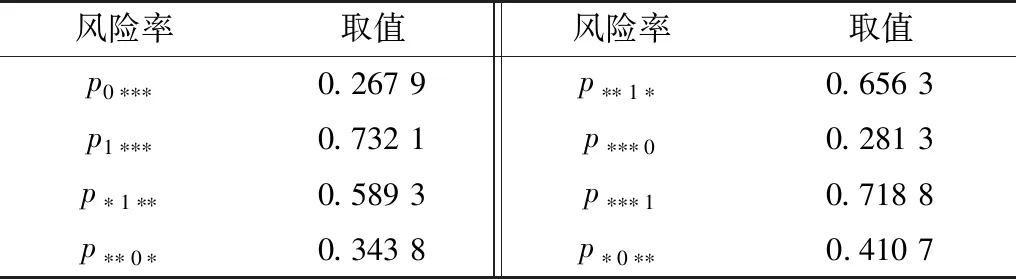
表4 单因素变化风险概率Table 4 Single factor change risk probability
表4中,p0***为人为因素不参与耦合时风险发生的概率,p1***为人为因素参与耦合时风险发生的概率,“*”代表0或1,有p0***=p0000+p0100+p0010+p0001+p0110+p0101+p0011+p0111=0.267 9。同理可得表4中其他单因素变化风险概率含义及计算结果。
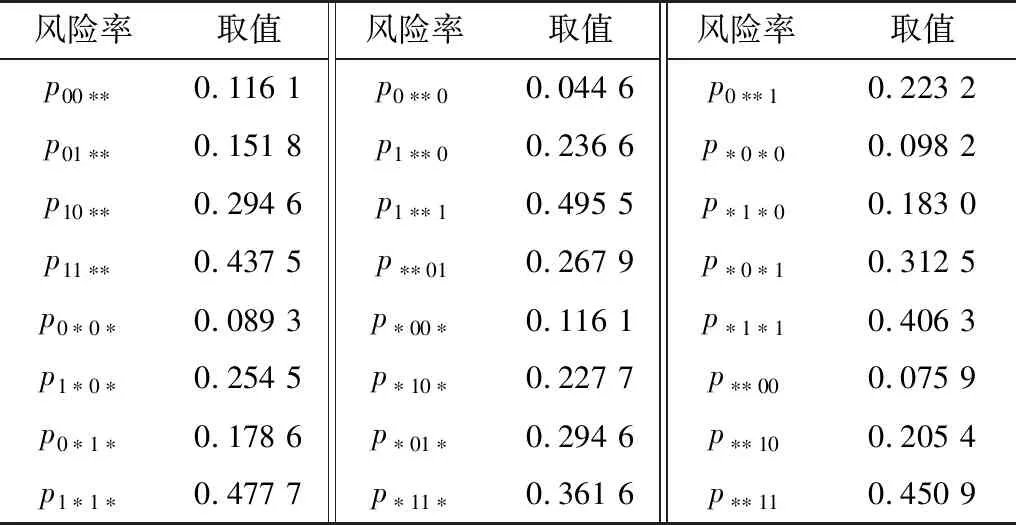
表5 双因素变化风险概率Table 5 Double factors change risk probability
表5中,p00**为人为因素及船舶因素均不参与耦合时风险发生的概率,p01**为人为因素不参与且船舶因素参与耦合时风险发生的概率,“*”代表0或1,有p00**=p0000+p0010+p0001+p0011=0.1161。同理可得表5中其他双因素变化风险概率含义及计算结果。
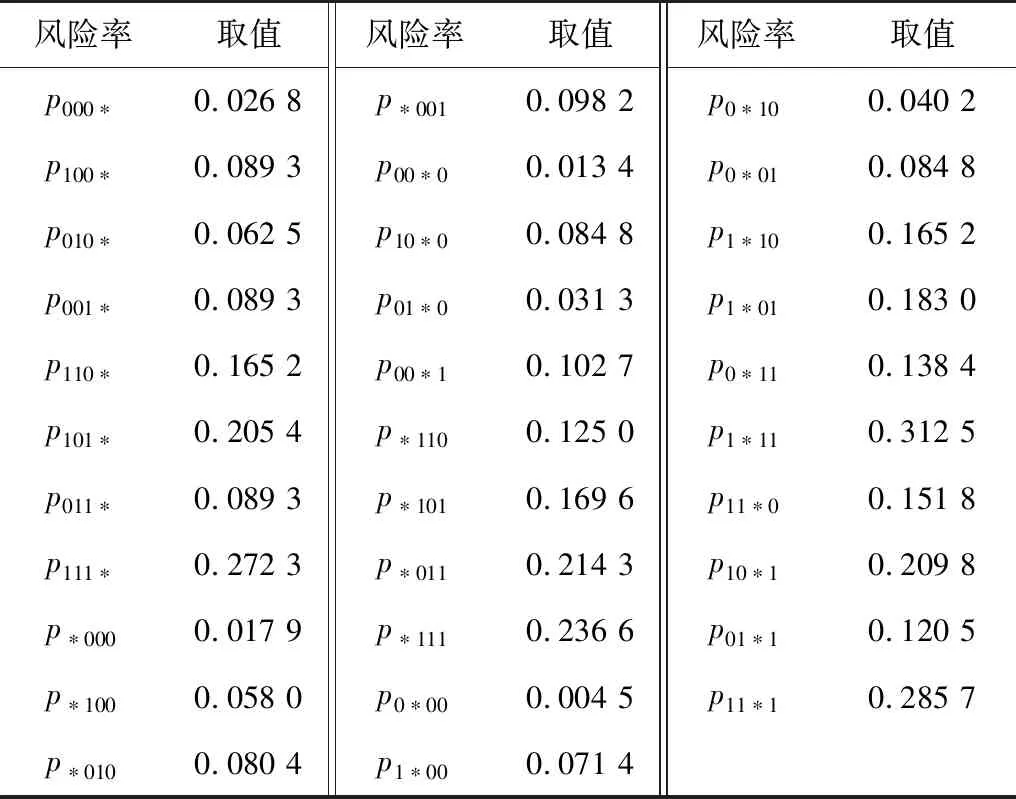
表6 3因素变化风险概率Table 6 Multiple factors change risk probability
表6中,p000*为人为因素、船舶因素及环境因素均不均不参与耦合时风险发生的概率,,“*”代表0或1,有p000*=p0000+p0001=0.0268。同理可得表6中其他3因素变化风险概率含义及计算结果。
根据式(4)~式(7)和表4~表6中的结果计算水上交通事故各风险因素耦合值,如表7。
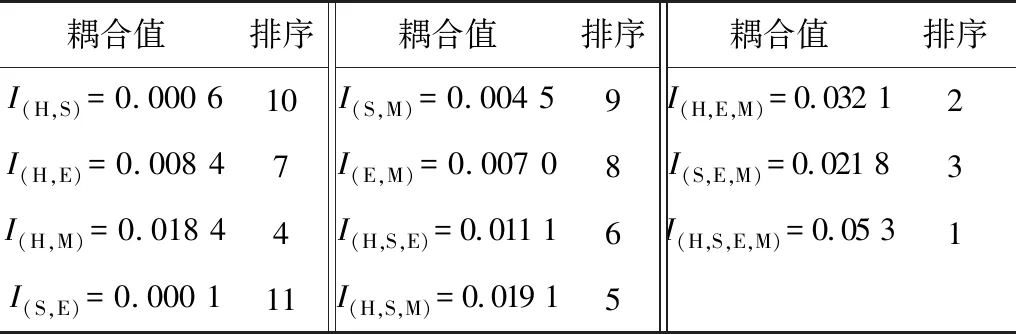
表7 水上交通事故各风险因素耦合值Table 7 Coupling value of risk factors of marine traffic accidents
由表7结果可知:各风险因素耦合值的排序为:I(H,S,E,M)>I(H,E,M)>I(S,E,M)>I(H,S,M)>I(H,M)>I(H,S,E)>I(H,E)>I(E,M)>I(S,M)>I(H,S)>I(S,E)。
3.3 结果分析
1)从总体上来看,水上交通事故的发生风险因素耦合值基本上与参与耦合风险因素数量呈正相关,即水上交通系统中人、船舶、环境及管理4个因素发生耦合时,风险值最大;虽然计算结果显示人和管理2个因素耦合时的风险大于人、船舶及环境3个因素耦合时的风险,但总体趋势上3个因素耦合风险仍大于双因素耦合风险。
2)3个因素耦合的4种情况中,风险耦合值较大时均包含管理因素,而不包含管理因素的3个因素耦合值要小于人和管理因素耦合的双因素耦合值。说明管理因素在水上交通安全系统中起到关键作用,当管理因素出现问题且与其他因素发生耦合时,引发水上交通事故的可能性很大。
3)双因素耦合的6种情况中,人和管理耦合风险值最大,其次是人和环境、管理和环境、船舶和管理,说明人和管理两个因素对双因素耦合的影响较大,同时也必须重视环境在双因素耦合时的作用。另外,虽然人和船舶、船舶和环境耦合风险较小,但老旧船舶、恶劣的通航环境,通常是引发水上交通事故的直接因素,仍应重视。
4 结 论
借用触发器的原理,考虑国际公约标准、航运市场等外部宏观因素的影响,系统分析了水上交通系统内在人、船舶、环境、管理因素风险之间的耦合强度及事故触发过程,进一步揭示了水上交通事故发生的内在规律和预控关键。
统计分析近10年水上交通事故数据,借助N-K模型量化了水上交通系统不同风险因素耦合值。结果表明:水上交通系统的风险和参与耦合的风险因素数量为正相关关系,管理因素对水上交通系统的安全起决定性作用,其次是人的不安全行为。可根据分析结果判断水上交通系统中的关键风险因素并加以控制,及早阻断参与耦合的风险因素数量,降低风险发生概率。
猜你喜欢
中国交通信息化(2022年9期)2022-10-28
农业工程学报(2022年4期)2022-04-24
汽车工程师(2021年12期)2022-01-17
智能制造(2021年4期)2021-11-04
小雪花·成长指南(2020年2期)2020-10-12
计算机辅助工程(2018年3期)2018-09-17
智富时代(2018年6期)2018-08-06
智富时代(2018年6期)2018-08-06
中国集体经济(2017年1期)2017-01-04
电脑知识与技术(2016年3期)2016-04-07
