基于主被动遥感数据和面向对象的大蒜识别
2022-04-19 07:07:16马战林薛华柱刘昌华李长春周俊利
农业工程学报 2022年2期
马战林,薛华柱※,刘昌华,李长春,房 旭,周俊利
(1. 河南理工大学测绘与国土信息工程学院,焦作 454003;2. 河南省遥感测绘院,郑州 450003)
0 引 言
大蒜作为一种重要的小宗经济作物,在河南省、山东省等地区广泛种植。快速、精准地获取大蒜种植面积,对降低市场变动带来的风险和促进中国经济作物市场化发展具有重要意义。
在大规模农作物种植监测中,遥感技术相对人工统计法有更经济、及时、高效和客观的优势。高光谱和高时空分辨率卫星技术的蓬勃发展,推动了遥感技术在大范围农作物、农情监测中的应用。在众多高时空分辨率卫星中,Sentinel主被动遥感卫星成为露天农作物种植监测的主要数据源。已有学者利用最大似然、人工神经网络、支持向量机和监督分类等分类方法,融合光学和合成孔径雷达(Synthetic Aperture Radar,SAR)数据的分类精度高于单一数据源。多时相遥感数据可以获取作物生长结构时序变化,将多时相光学和SAR数据进行融合可获取更多的作物信息,进一步提高作物识别精度。
当前,遥感数据作物提取方法主要为基于像元和降低光谱变异的面向对象方法。基于像元的影像分类容易产生椒盐效应,面向对象方法将遥感影像的各个波段分割合并成若干互不重叠的分类单元,利用不同波段分割后的合成数据进行分类,有效降低基于像元分类产生的许多孤立噪声点,避免椒盐现象和提升分类精度。图像分割方法和尺度直接影响作物识别精度。简单线性迭代聚类(Simple Linear Iterative Clustering,SLIC)算法是一种非常高效的图像分割算法,而改进的简单非迭代聚类(Simple Non-iterative Clustering,SNIC)图像分割算法,以对内存要求更低、超像素生成速度快、精度高、更加适合云计算运算环境,而被广泛应用于遥感数据分类研究。分割尺度的选择决定生成对象的大小,“分割不足”或“过度分割”都会对分类结果产生不利影响。有研究应用对象同质性局部方差、“面积对象数比”法获取影像的整体最优分割尺度,但并非针对某一特定作物进行最优分割尺度选择。最优分割尺度的选择,需根据遥感数据和提取对象的实际情况进行选择。如程琳琳等对GF-1数据进行分割尺度选择研究,当分割尺度为230时,分割结果对水产养殖湿地边界吻合度高,分割效果好。张露洋等对Landsat数据进行土地利用研究时,选择20为最优分割尺度。
人工、自然覆被的纹理特征存在差异。地表纹理特征的加入可以有效提高地表分类精度。但大量纹理和形状信息加入后,同样会带来噪声或冗余信息,从而降低分类精度。有学者应用特征优选法、主成分分析法(Principal Components Analysis,PCA)等方法降低特征变量维度,达到较高的分类精度。
开封市面积达6 444 km,下载数据、配备遥感软硬件工作站的传统方式增加处理遥感数据的时间和计算成本。谷歌地球引擎(Google Earth Engine,GEE)仅需少量代码则可轻易、快速获取研究时间、地理范围内的遥感数据。GEE包含当前常用的支持向量机、随机森林(Random Forest,RF)等机器学习算法。RF运算速度快、并行性和稳健性强,以及固有的多种优点被广泛应用于作物识别中。中国北方大蒜和冬小麦在各自不同生育期内,具有相似的物候和光谱特征,单纯依靠光学影像难以区分。综合上述多方面因素,本文基于GEE云平台,利用大蒜生长周期内包含地物结构信息变化的Sentinel时序SAR极化数据和光学数据,应用面向对象方法和RF算法,探讨融合不同分辨率主被动遥感数据的极化特征、光谱特征、光谱指数特征与纹理特征的不同组合对提升开封市大蒜识别精度的影响,为快速、及时、精准获取中国大蒜种植面积及对大蒜市场化健康发展提供技术支持。
1 研究区域与数据来源
1.1 研究区概况
开封市位于河南省中东部,西邻黄河,界于113°52′15″~115°15′42″E,34°11′45″~35°01′20″N,总面积达6 444 km。该市属典型温暖带大陆性季风气候,四季分明,年平均气温14.1 ℃,年均降水量722 mm。开封市地势平坦,农业发达,耕地面积占总面积的69.20%,是河南省乃至全国重要的农产品生产区,主要作物有小麦、花生、玉米、大蒜、棉花等,是全国六大大蒜主产区之一。依据河南省2018—2020年统计年鉴,该区域内大蒜种植面积达到499 km以上,占开封市总面积8%左右。大蒜一般在每年的10月份播种,5月至6月份收获,与小麦生长周期基本重叠,且区域内农作物种植结构复杂,地块狭长,破碎化程度高。为验证不同特征组合及分类器在不同碎部地区的分类性能,研究选取大蒜占比较少的a区域和大蒜与冬小麦错综复杂的b区域,并引入更高分辨率的高分数据进行对比分析,开封市、a和b区域的具体位置如图1所示。因此,在该区进行遥感大蒜识别研究,具有很强的实用价值。
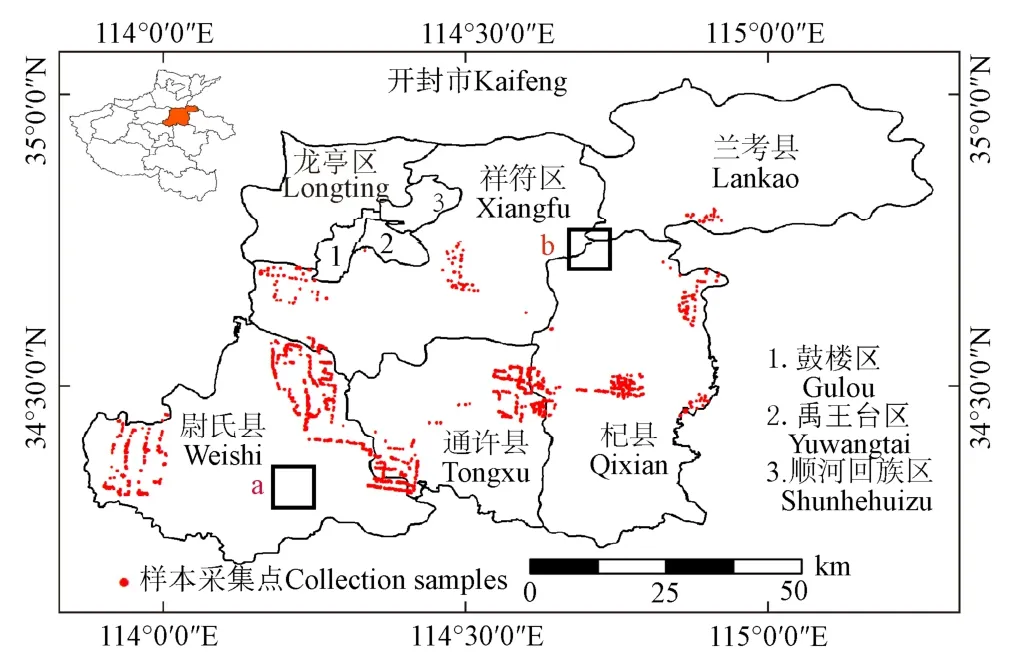
图1 开封市地理位置及样本采集点空间分布 Fig.1 Geographical location of Kaifeng and space distribution of collection samples
1.2 谷歌地球引擎及应用数据
谷歌地球引擎(GEE)基于谷歌云计算平台开发,目前存储超过5PB的海量遥感数据及产品数据,包含Sentinel、Landsat、MODIS等多源遥感数据和叶面积指数、降水等遥感产品数据,且逐日增加不同传感器约5 000张最新遥感影像,能够解决大范围遥感数据的存储下载问题。
Sentinel-1主动微波遥感卫星和Sentinel-2光学卫星的详细介绍如文献[7]中所述。本文采用分辨率为10 m和20 m、极化方式为“VV”和“VH”的Sentinel-1卫星后向散射系数数据。Sentinel-2光学数据主要选取10 m分辨率的蓝光(490 nm)、绿光(560 nm)、红光(660 nm)、近红外(840 nm)波段及20 m对植被监测有效的3个红边波段(703.8 nm、739.1 nm、779.7 nm)。Sentinel系列卫星数据均在GEE云平台上调用、处理。GEE通过“ee.ImageCollection('COPERNICUS/S1_GRD')”等函数,可直接获取“VV”和“VH”后向散射系数数据,降低SAR数据处理难度。Sentinel-2数据依据大气校正状态分为两个级别:1C级和2A级。1C 是大气顶层反射率数据,2A是已经过大气校正后的地表反射率数据,本文选用云量低于10%的2A级数据用于大蒜种植区域的识别研究。表1为应用数据的传感器参数。
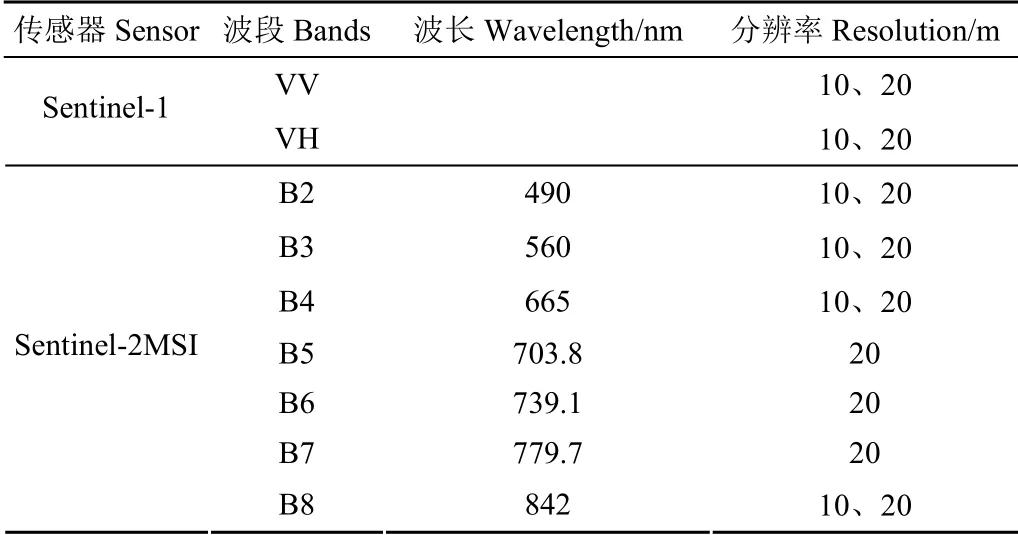
表1 Sentinel卫星传感器参数 Table 1 The Sentinel satellite sensor parameters
为验证识别精度,本研究利用2021年3月2日GF-1和2021年3月30日GF-2融合后的2 m分辨率多光谱数据,用于评价10 m、20 m分辨率Sentinel主被动数据在碎部地块的分类性能。
1.3 特征变量与数据集
根据研究区覆被类型、地形地貌和植被生长季物候特征等因素,选取Sentinel-1 影像的VV、VH后向散射系数,Sentinel-2影像的光谱反射率及由反射率计算的光谱指数和纹理特征等特征变量提取大蒜种植面积。其中,光谱指数包含:归一化差异植被指数(Normalized Difference Vegetation Index,NDVI)、归一化水体指数(Normalized Difference Water Index,NDWI)、增强型植被指数(Enhanced Vegetation Index,EVI)、绿色归一化差异植被指数(Green Normalized Difference Vegetation Index,GNDVI)、绿叶指数(Green Leaf Index,GLI)和优化土壤调节植被指数(Optimization Soil-adjust Vegetation Index,OSAVI),各光谱指数在分类中的优势及作用如文献[7]所述。
为避免多纹理特征带来的特征信息冗余,依据Hall-beyer和Ulaby等研究结论,本研究选择熵值(Entropy,ENT)、逆差矩(Inverse Difference Moment,IDM)、角二矩阵(Angular Second Moment,ASM)、方差(Variance,VAR)、对比度(Contrast,CONTRAST)、均值(Mean,MEAN)、相关性(Correlation,CORR)7个纹理特征变量,以上纹理特征可确保在较高分类前提下保留最大量原始信息。其计算公式详见文献[28],所选特征变量与相关植被指数计算公示如表2表示。
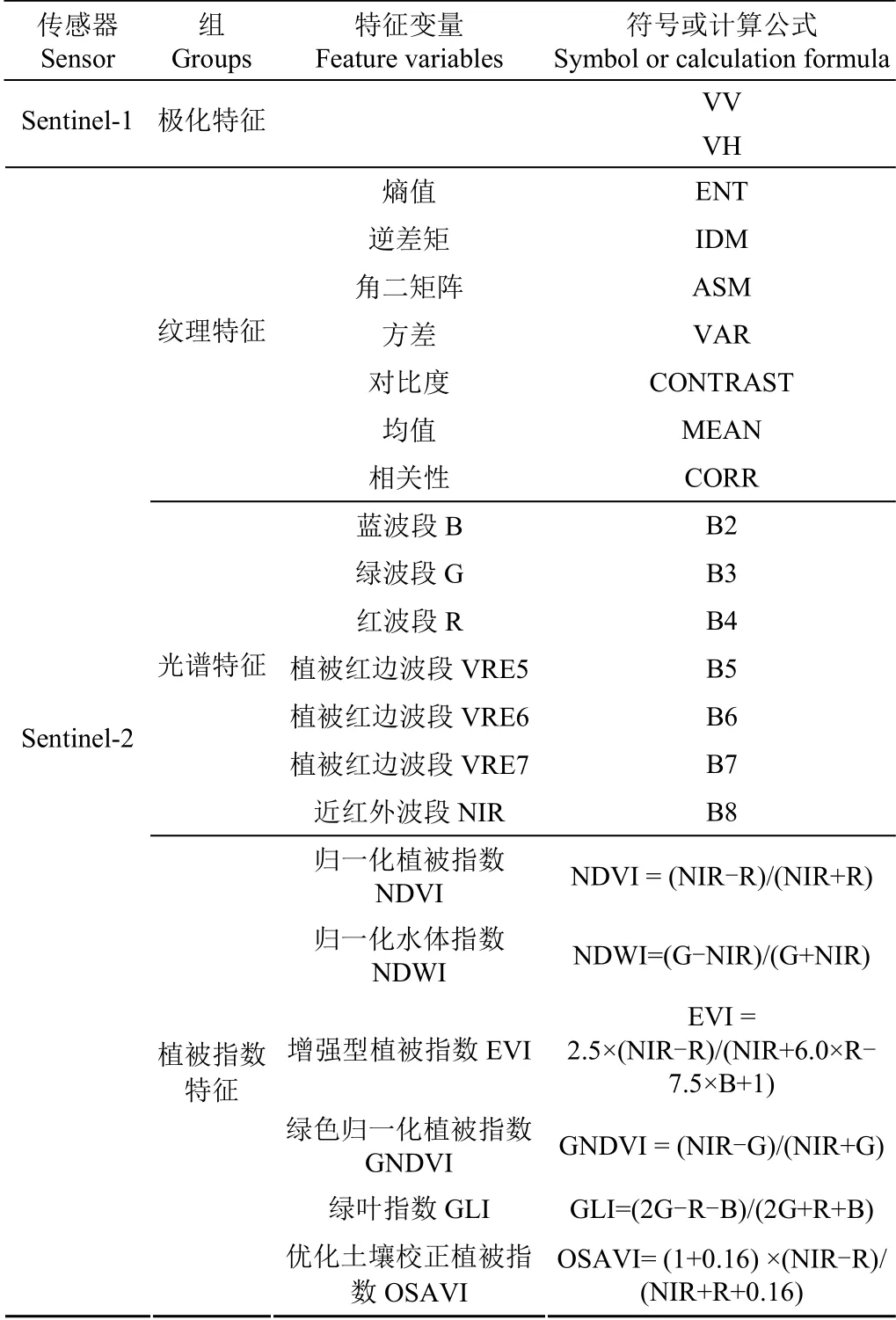
表2 特征变量及其计算公式 Table 2 Characteristic variable and their calculation formula
为确定开封市主要地表覆被类型,利用Google Earth地图,在2021年2月15日到2021年4月12日大蒜生长期内进行了实地调查及样本采集工作。开封市农田、道路、房屋、水体占地表覆被总面积90%左右,林地、园地覆被面积较少,占总面积的5.46%。故将主要的覆被类型分成6个大类,为建设用地、大蒜、冬小麦、水体、其他植被与其他用地。建设用地包含房屋、道路、厂矿等建筑用地,其他植被包括蔬菜、林草地、瓜田、果园等,其他用地囊括石料厂、裸土等。应用中海达V30型GPS仪器进行实地采样,共获得4 922个样本点,包括大蒜914个样本点,冬小麦1 266个样本点,其他用地745个样本点,水体750个样本点,建设用地894个样本点,其他植被353个样本点,其中田地采样点均在大面积(边长100 m以上)田块中心采集。在较小样本总量(小于1 000)及应用RF算法时,训练集与验证集的比例通常大于1,目的是为了使训练模型的稳健性更高,便于提高分类精度。有关研究表明,基于面向对象方法和应用RF算法时,过多的训练样本数量(大于625)对总体分类精度的影响程度小于0.5%。本文依据实际样本采集数量,并参照汪小钦等采用更多样本数据量验证分类精度的方法,将随机选取的训练样本数据集(总数1 339)和验证数据集(总数3 278)比例设为1∶2,如表3所示,以应用更多样本采集点来验证算法的有效性。
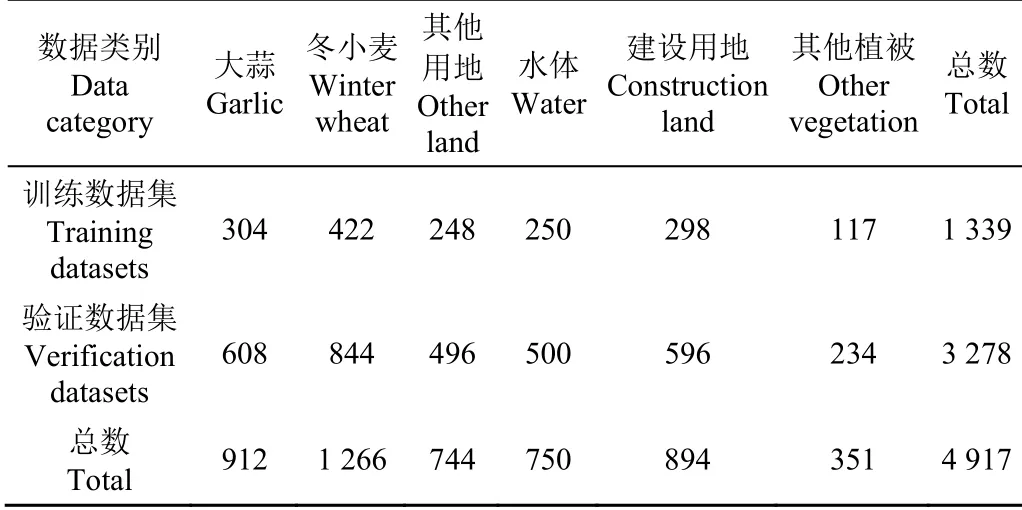
表3 样本数据集 Table 3 Sample data sets
2 研究方法
2.1 随机森林算法
本研究在进行分类时选择随机森林(RF)算法,RF由多棵CART决策树组合而成,属于监督分类机器学习算法。文献[7、32]详细介绍RF算法的原理与思想。相关研究表明RF算法相比其他机器学习算法训练效率与分类精度均有很好的表现,GEE中提供的RF算法还可以同时确定输入特征的权重,并对样本数量和质量的敏感度低而广泛用于遥感影像数据的监督分类中。RF算法需输入两个变量:特征变量个数和决策树数量。输入的特征变量个数在研究中固定不变,需要确定最佳的决策树数数量。根据郭群佐等研究结果及多次试验,分类时选取的决策树数量为50。
2.2 主成分分析
主成分分析(PCA)法是对多波段图像的原始空间乘以一个线性变换矩阵,重新产生新空间的过程。公式为

式中表示图像的原始空间;表示线性变换;为变换后的新图像空间。
2.3 简单非迭代聚类算法和灰度共生矩阵算法
简单非迭代聚类(SNIC)算法基于SLIC算法改进而来,有效地提高了聚类效率。GEE中的“ee.Algorithms. Image.Segmentation.SNIC()”函数进行图像分割和参数设置,该函数的主要参数有“image”、“size”、“compactness”、“connectivity”、“neighborhoodSize”和“seeds”。其中“image”是参与分割的图像。“size”是指基于像素的超像素种子位置间距,即分割大小,如设置有“seeds”,此参数可不设置参数。“compactness”为分割后集群的规整程度,数值越大,分割结果越接近正方形,此处设置参数为0。“connectivity”为像元的邻接性,为4邻接性或者8邻接性,文中选取8邻接性。“neighborhoodSize”代表领域的尺寸,一般选取256。“seeds”为种子,即聚类中心,种子点分布越分散,分成的块越大。
灰度共生矩阵(Gray-level Co-occurrence Matrix,GLCM)以像元的灰度和位置为研究对象,反映像素灰度关于方向、相邻间隔、变化幅度等多维信息。GEE中,“glcmTexture()”是计算图像GLCM纹理特征的函数,该函数的主要参数包括“image”,“size”,“kernel”和“average”。其中“image”是分割图像。“size”为计算像素的邻域值,在计算中试验4、8、16邻域值。“kernel”为计算中心像素的偏移量,“average”是对每个度量方向波段取平均值,两者在程序中都不进行参数设置。GLCM从8位灰度图像中提取角二阶矩、对比度、相关性、熵、方差、反差分矩阵、能量、均值、和平均、和熵、和方差等14个纹理特征和差异性、惯性、集群阴影及群集突出物4个Haralick纹理特征。
为充分利用光学数据的光谱信息及减少所应用每个波段的纹理信息计算量,Tassi等应用近红外波段(Near infrared band,NIR)、红波段(Red band,R)和绿波段(Green band,G)的线性组合生成灰度图像(Gray level image,Gray)来计算纹理特征,公式如下

2.4 精度评价
考虑到开封市作物间作、套作种植模式,分类精度受地块破碎度高造成的混合像元及像元噪点等影响。制图精度、用户精度、总体精度和Kappa系数用于评价文中分类器的性能,其详细计算公式见文献[37]。
3 结果与分析
3.1 遥感数据与SNIC、GLCM算法参数的选择
作物生长是一个随时间变化的连续过程,遥感数据获取的是离散时间点的作物生长信息。光学数据是卫星获取目标地物的瞬时物理光谱特征,时序、动态的NDVI波动则体现植被不同生长阶段的物候特征变化。Savizky-Golay(S-G)滤波算法能够去除像元突变导致的NDVI污染。图2表示研究区不同覆被采集点在大蒜物候期内的均值NDVI,经S-G滤波后的三次样条插值曲线。大蒜属耐寒蔬菜,物候特征曲线变化与冬小麦相似,一样经历越冬期,受种植密度影响,大蒜相较冬小麦的NDVI值较低。2—3月温度上升,相比其他植被,大蒜和冬小麦此阶段生长较快,致使NDVI特征值差异值开始扩大。3—4月份为大蒜的花芽鳞茎分化初期,冬小麦处于拔节孕穗期,迅速上升的叶绿素含量导致两者植被指数较高,与其他植被及其两作物之间的NDVI值在此时差异最大。依据特征值差异与RF算法的分类精度呈正比例关系和避免云雾对大面积光学数据造成较大影响,研究选取2021年3月1日到3月31日期间Sentinel-2月均值合成光学数据。影像叠加可消除异常值和改善色差影响。在GEE中,含云量小于10%的数据主要在3月3日(2幅)和3月28日(5幅),共 7幅影像。通过“get('CLOUDY_PIXEL_PERCENTAGE')”函数,输出每幅Sentinel-2光学影像的含云量,3月3日分别为1.06%和1.93%,3月28日全部为0.00%,月均值合成图像的含云量为0.00%。
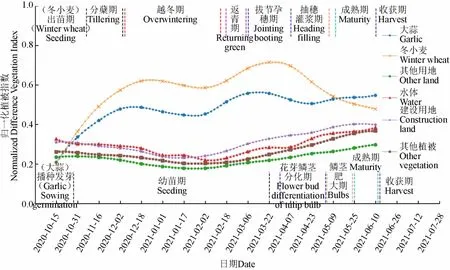
图2 不同覆被Savizky-Golay滤波NDVI三次样条插值曲线 Fig.2 Different land cover NDVI curves with cubic spline interpolation under Savizky-Golay filter
具有穿透性的SAR传感器能够获取长时序的植被表面后向散射信息,且不受天气因素影响。对于特定作物的识别研究,主要应用该作物与其他覆被类型在不同物候期的生长结构、光谱特征差异进行目标识别。时序的后向散射信息对植被的叶、茎、枝干等结构信息变化有一定的反映。图3表示开封市大蒜生长周期内,不同时期、不同覆被类型采样点的VV、VH极化雷达后向散射系数均值经S-G滤波后的三次样条插值曲线。大蒜的VH后向散射系数在整个生长周期内高于冬小麦,而VV后向散射系数在大蒜幼苗期前存在一定的交叉,后期两者出现分离,但大蒜整体的VV极化后向散射系数高于冬小麦。将SAR后向散射系数在月尺度上进行均值合成后,能够降低土壤水分含量对分类精度的影响,有利于提高作物的分类精度。综上因素,研究选取大蒜生长期内2020年11月到2021年5月的Sentinel-1 SAR数据,在月尺度上进行均值合成,用于大蒜提取研究。
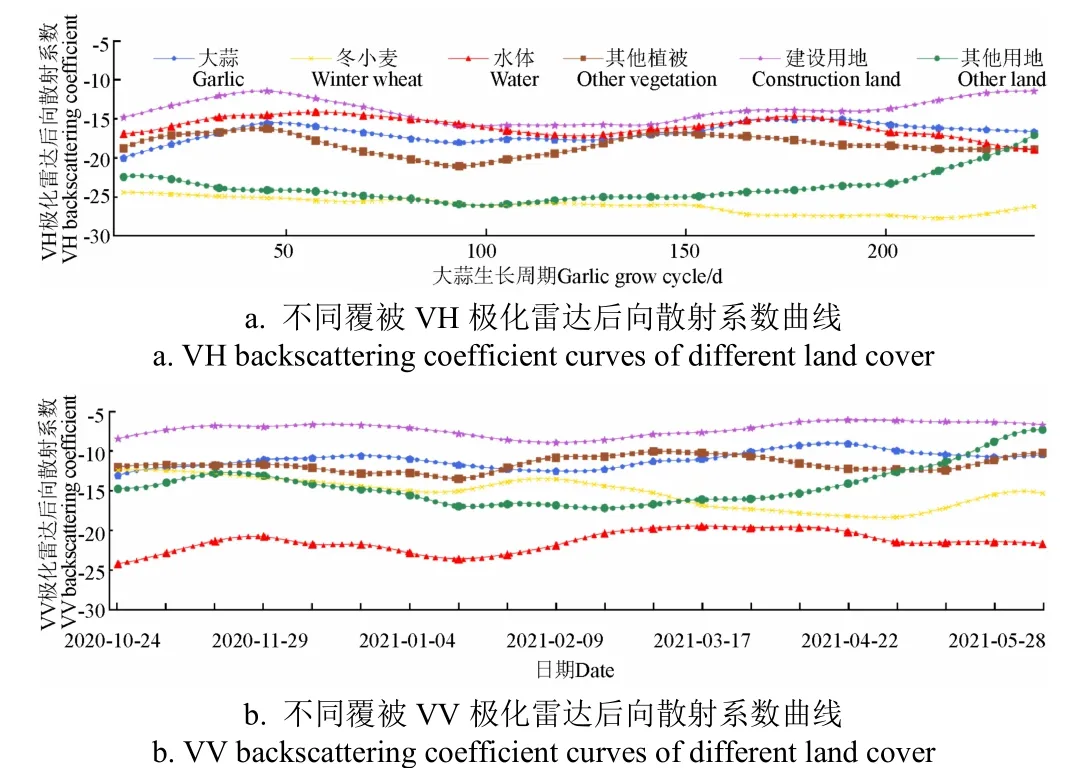
图3 不同覆被Savizky-Golay滤波VH、VV极化雷达后向散射系数三次样条插值曲线 Fig.3 Different land cover VH、VV backscattering coefficient curves with cubic spline interpolation under Savizky-Golay filter
影像的分割尺度直接决定了某一目标地物的尺度,即分割后对象的平均大小需和识别的地物尺度大小相一致。分割尺度相同时,影像分辨率越高,分割后地物细节、轮廓体现越明显。研究选取较低的分辨率影像确定大致分割尺度范围。图4为20 m分辨率光学影像在1、5、10、15分割尺度下的分割特征。分割尺度为1时,分割结果整体呈现块状,无覆被细节、边界等任何信息,不予使用。分割尺度大于1小于10内,分割特征与实际地类细节、边缘较为吻合。
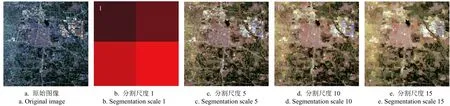
图4 SNIC不同分割尺度结果 Fig.4 SNIC different segmentation scale results
空间分辨率越高,纹理特征细节体现越明显。文中选取较高分辨率影像确定GLCM纹理特征邻域值。图5表示10 m分辨率合成波段GLCM纹理特征邻域值为4、8、16时,纹理特征PC1、PC2(the second principal component)、PC3(the third principal component)主成分合成的真彩色影像。GLCM算法的邻域值为4时,地物细节体现明显,更加适合面向对象方法的分类研究。其原因是开封市破碎地块像素变化不规律,导致GLCM计算纹理特征的邻域值选择较大时,更多的周围像素参与计算,导致纹理特征细节体现较差。
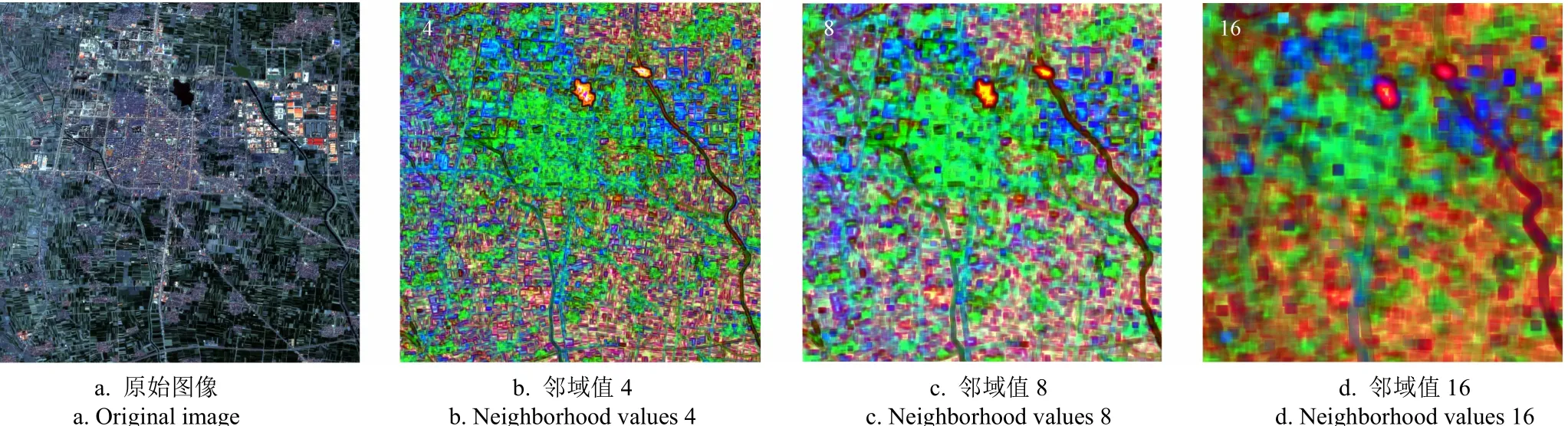
图5 不同邻域值的GLCM纹理特征 Fig.5 GLCM texture features of different neighborhood values
3.2 融合高空间分辨率Sentinel主被动遥感数据大蒜识别研究
研究首先应用10 m分辨率的极化特征、光谱特征(R、G、B、NIR)、植被指数特征与不同的纹理特征主成分组合,进行大蒜识别研究。在上节研究结果中,GLCM邻域值选取4,SNIC分割尺度选择2到9进行试验。10 m分辨率Sentinel主被动遥感数据的不同分割尺度与特征组合的分类总体精度、Kappa系数、大蒜制图精度、大蒜用户精度如表4所示。
从表4中可以得出,10 m分辨率的Sentinel主被动遥感数据分割尺度为5时,添加纹理特征能够提升分类的总体精度和Kappa系数,且纹理特征选取PC1(信息量:95.56%)、PC2(The Second Principal Component)(信息量:4.19%)主成分时,总体分类精度和Kappa系数最高,达到94.54%和0.93。分割尺度低于5或大于5时,添加纹理特征未体现明显规律。大蒜的制图精度在分割尺度为7,纹理特征为PC1时最高,达到97.53%;大蒜用户精度则在分割尺度为6,无纹理特征的情况下最高,达到99.49%。在有关影像分割的研究中,多尺度分割成为当前的研究热点。开封市大蒜在杞县、开封市西部以及兰考县南部大规模种植,而在其他地区则与冬小麦交叉或零星种植,且种植地块细小、狭长。在进一步提取大范围的大蒜识别中,将依据研究区提取对象的空间分布使用多尺度分割方法。本研究主要目的是在合适分割尺度下,探究融合数据的面向对象方法在识别大蒜方面优势。
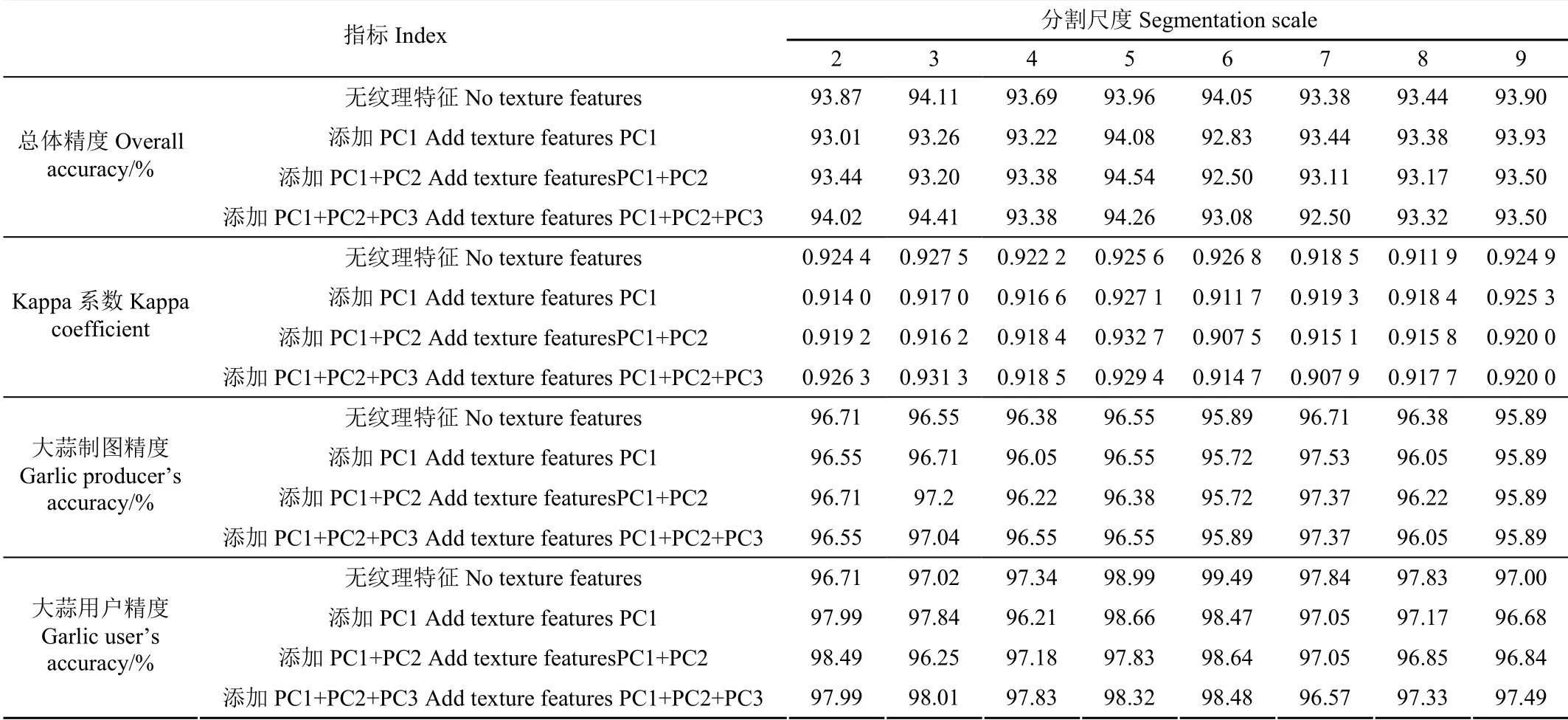
表4 不同分割尺度的分类结果 Table 4 Classification results of different segmentation scales
依据最高分类总体精度和Kappa系数,研究中分割尺度选择5,纹理特征选取PC1、PC2主成分,其详细分类情况如表5和图6、7、8所示。大蒜的制图精度和用户精度分别达到97.83%、96.38%;同样,良好的分类算法及其分割尺度、纹理特征的优化,冬小麦的制图精度和用户精度达到93.05%和99.88%。可见,应用融合Sentinel主被动遥感数据可有效分离出具有相同或重叠生长周期的不同作物,但对其他植被的识别精度较低。其原因是开封市其他植被所占比例较小,应用10 m分辨率时,可能占据不到一个像元,或者与农村低矮建筑物构成混合像元,造成识别精度较低。此时,应结合植被的物候特征,使用可以体现作物生长-衰老交替的多时相光学遥感信息,提升混合像元、破碎地块及其边界的识别精度,削弱或避免“同物异谱”和“异物同谱”现象,但该方法易受光学数据缺乏影响。
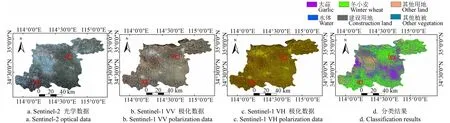
图6 10 m分辨率Sentinel主被动遥感数据及其分类结果 Fig.6 10 m resolution Sentinel active and passive remote sensing data and its classification results
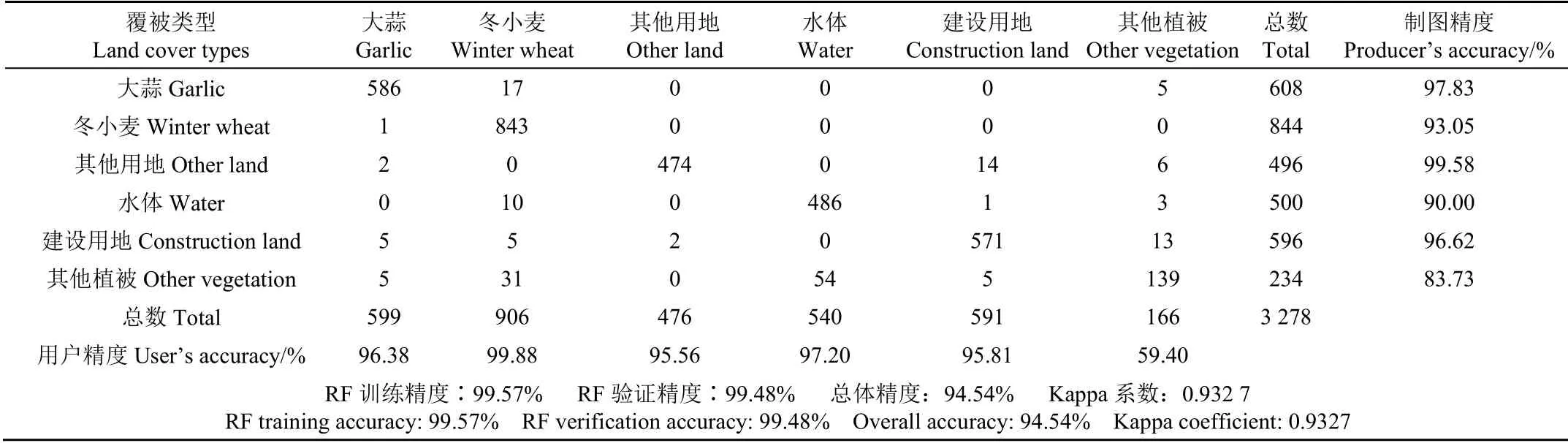
表5 融合10 m分辨率Sentinel主被动遥感数据分类结果 Table 5 The classification result of integrating 10 m resolution Sentinel active and passive remote sensing data
RF算法能够获取每个特征变量的相对特征权重,在遥感分类中对各特征变量具有较好的可解释性。其原理是将某特征变量数值作为随机数,计算它对模型准确率的影响,依据精度减少值来计算这一特征变量的权重,值越大说明该特征对分类结果贡献的权重越大。特征变量权重值的总和大小由变量的数目决定,其权重值的大小在自身变量组中具有相对意义。在GEE平台中可通过“explain()”函数输出各输入特征变量的权重值,如表6所示。
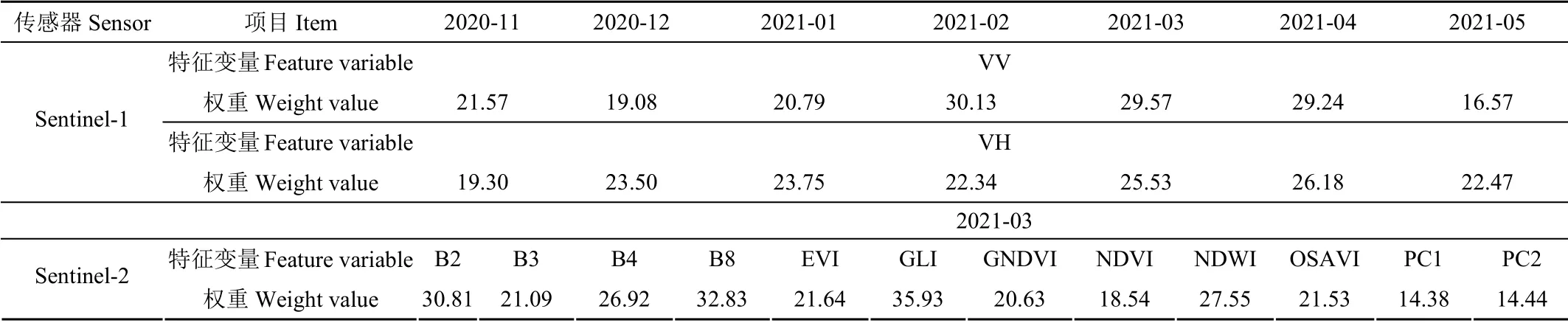
表6 10 m分辨率特征变量权重值 Table 6 Feature variable weight values of 10 m resolution
纹理特征PC1、PC2的特征权重小于其他所有特征权重,虽两者包含纹理特征信息量不同,但两者权重值相差仅为0.06,具体原因有待进一步挖掘。光学数据的权重和(286.29)小于时序SAR数据的权重和(330.02)。为进一步探究其原因,单独使用光学或SAR数据进行各地物分类,结果如表7所示。从表中发现,时序SAR数据对大蒜的制图精度和用户精度分别高于单期光学数据1.98百分点和1.50百分点。但对于冬小麦,光学数据的用户精度较高,制图精度较低。同样,单独或融合使用Sentinel主被动遥感数据,对其他植被的识别精度仍然较低。在后期研究中,使用多期光学数据结合地物的物候特征、像元分割技术或更高分辨率的光学数据等多种方法进行其他植被的识别研究。对比表5和表7,融合Sentinel主被动遥感数据后,其总体分类精度分别高于单一光学数据或时序SAR数据1.77%和5.28%,Kappa系数分别高于两者0.021 7和0.065 2,大蒜制图精度分别高于两者3.92%和1.94%,大蒜用户精度分别高于两者2.31%和0.81%。综上,融合Sentinel主被动遥感数据对大蒜的识别精度高于单独使用光学和时序SAR数据的识别精度,10 m分辨率时序SAR数据总体分类精度和Kappa系数低于光学的,但对大蒜的识别精度较高。
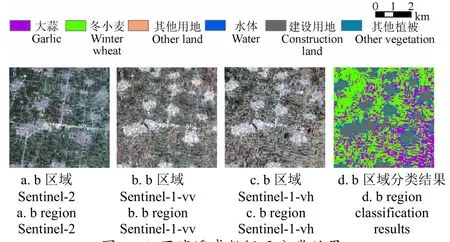
图8 b区域遥感数据及分类结果 Fig.8 b region remote sensing data and classification results
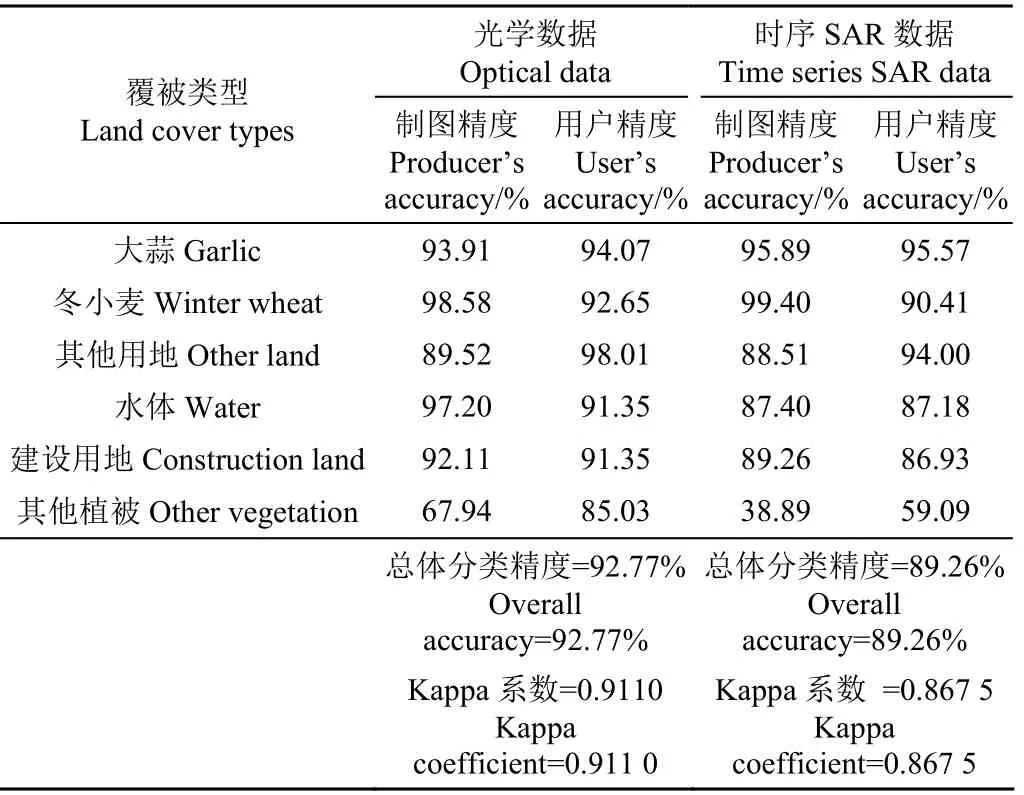
表7 10 m分辨率光学数据和时序SAR数据单独分类结果 Table 7 The classification results of optical and time series SAR data of 10 m resolution
3.3 融合多光谱分辨率Sentinel主被动遥感数据大蒜识别研究
为研究低空间分辨率、高光谱分辨率得Sentinel主被动遥感数据对大蒜的识别精度,选用20 m分辨率的极化特征、光谱特征(R、G、B、NIR、VRE5、VRE6、VRE7)、植被指数特征与不同的纹理特征组合,基于面向对象方法进行大蒜识别研究。GLCM邻域值同样选取4,SNIC分割尺度选择2到9进行试验。20 m分辨率Sentinel主被动遥感数据的不同分割尺度和特征组合的分类总体精度、Kappa系数、大蒜制图精度、大蒜用户精度如表8所示。
从表8中发现,20 m分辨率的Sentinel主被动遥感数据分类总体精度和Kappa系数在不同特征组合内,分割尺度的增加,两者呈下降趋势,且分割尺度(2到9)与两者的最低相关系数分别为-0.81和-0.66。当融合主被动遥感数据的分割尺度为3,选取纹理特征PC1(信息量:67.15%)、PC2(信息量:28.81%)时,分类总体精度和Kappa系数最高,达到94.14%和0.92,详细分类情况如表9和图9所示。此时,大蒜的制图精度和用户精度分别为95.72%和98.81%,相对于融合10 m分辨率的数据分类结果,大蒜制图精度精度降低2.11%,用户精度则提升2.43%;但分类总体精度和Kappa系数分别降低0.40和0.004 9。相对单独使用10 m分辨率的光学数据和时序SAR数据,融合20 m分辨率数据的分类总体精度分别提升1.37%和4.88%,Kappa系数分别提升0.016 8和0.060 3;大蒜的制图精度分别提升1.81%和降低0.17%,用户精度则分别提升4.74%和3.24%;同样对冬小麦的识别精度也达到91%以上。对比GF数据和图7、图9的碎部a区域分类结果,高光谱分辨率数据能够识别图9中a区域存在的大蒜。可见,高光谱分辨率数据在识别同生长周期作物具有较强优势。综上结果,融合多光谱数据虽空间分辨率相对较低,但在大宗、经济作物提取中仍占优势,对于占地面积小、破碎程度高的其他植被,提取效果同样较差。
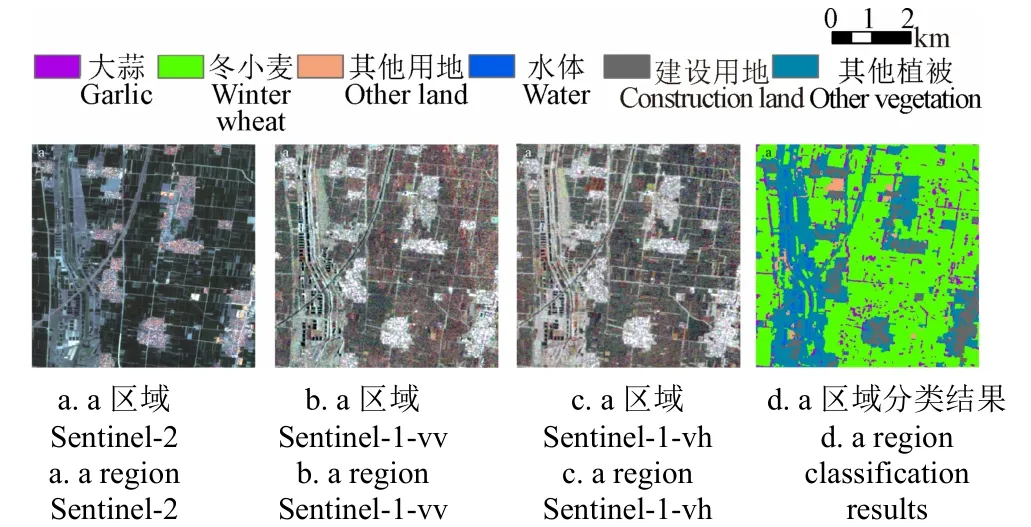
图7 a区域遥感数据及分类结果 Fig.7 a region remote sensing data and classification results
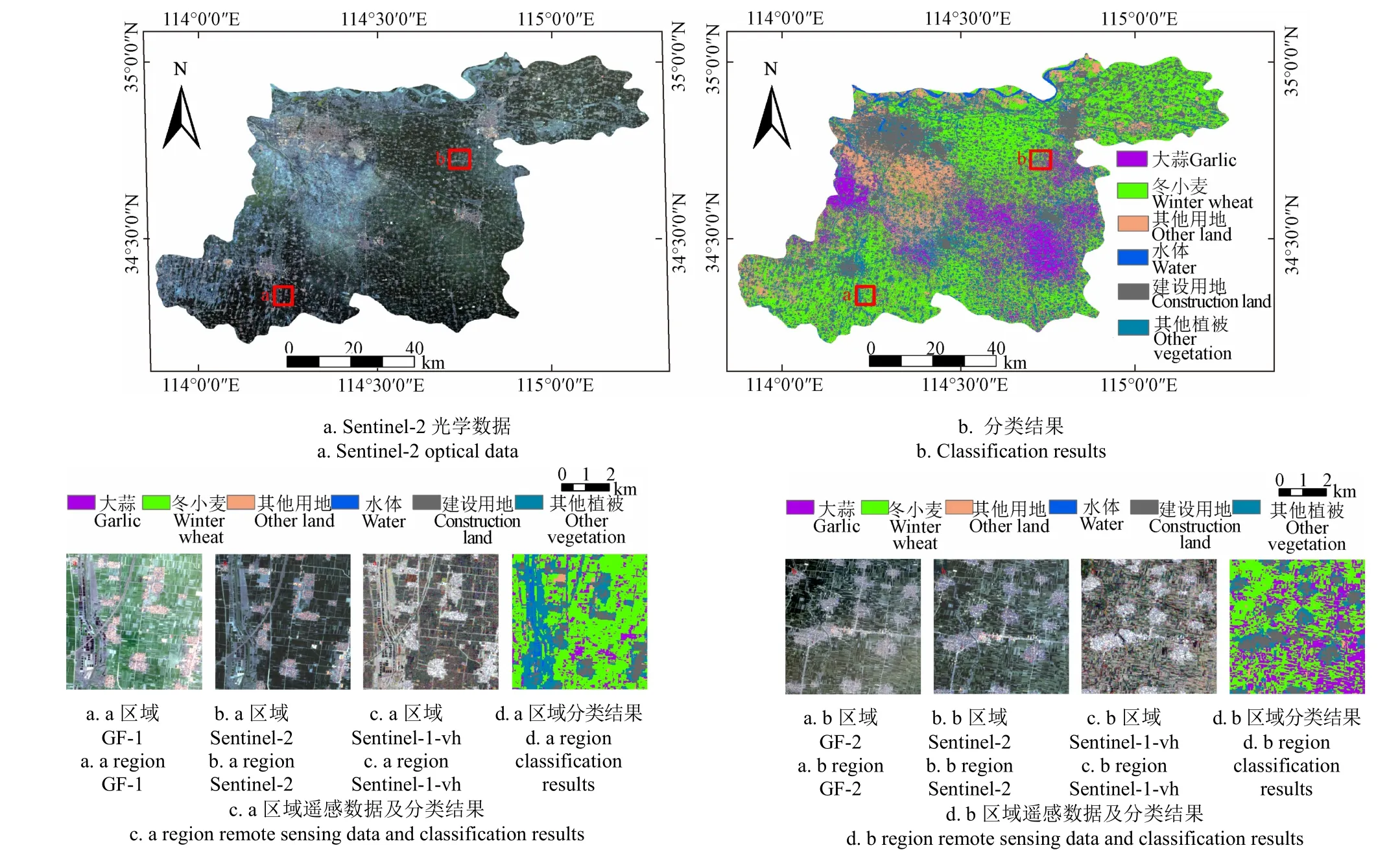
图9 20 m分辨率Sentinel主被动遥感数据及其分类结果 Fig.9 Sentinel active and passive remote sensing data and its classification results of 20 m resolution
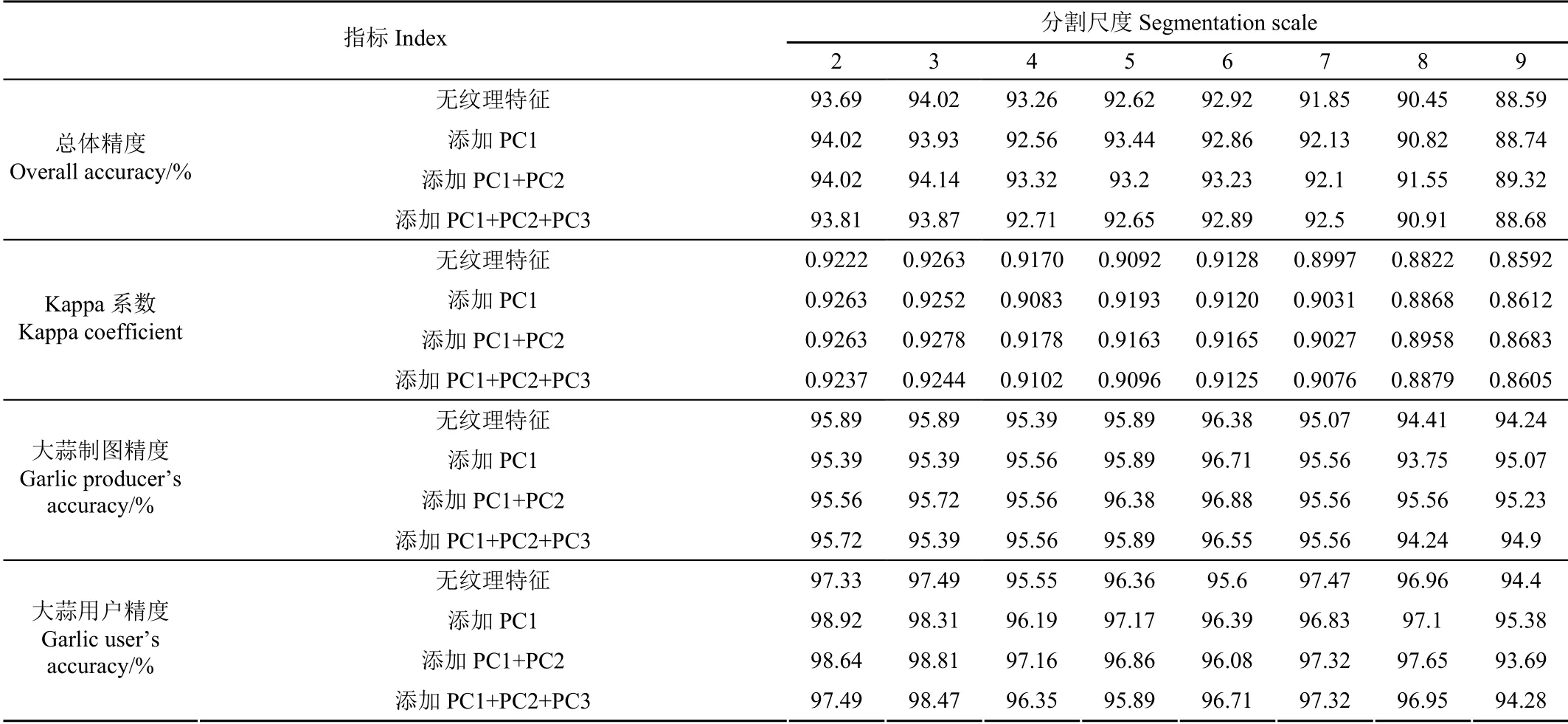
表8 不同分割尺度的分类结果 Table 8 Classification results of different segmentation scales
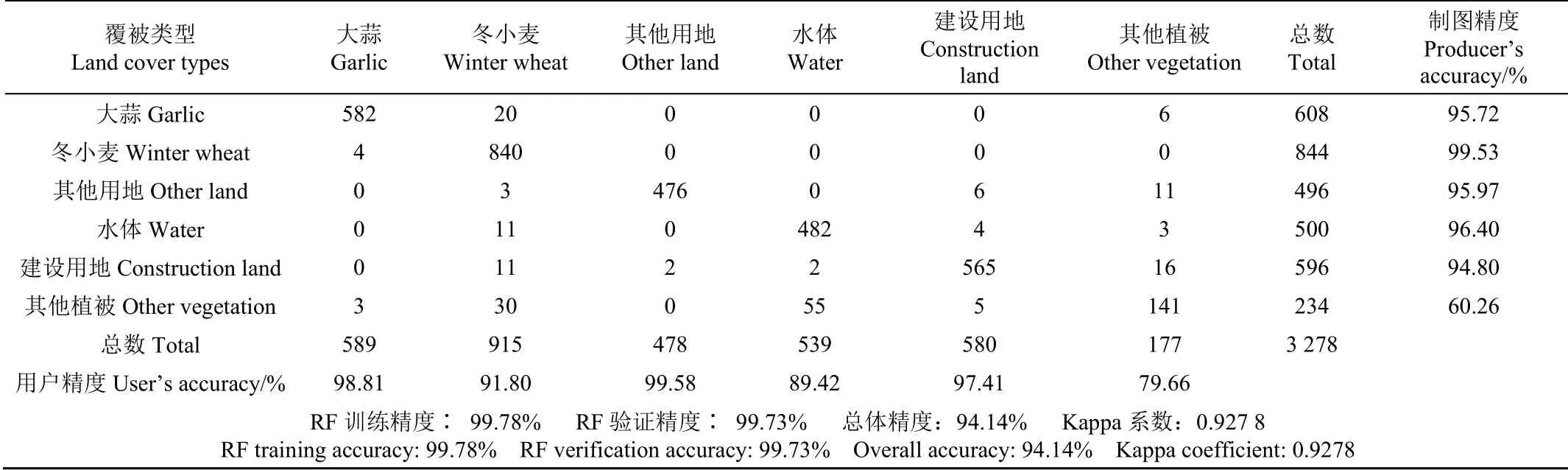
表9 融合20 m分辨率Sentinel主被动遥感数据分类结果 Table 9 The classification result of integrating 20 m resolution Sentinel active and passive remote sensing data
为探究20 m分辨率融合Sentinel主被动遥感数据红边波段在分类中的重要性,表10表示各变量的特征权重。从数值上得出B5、B6、B7的权重和(72.73)占整体权重(676.31)的10.75%,在分类中起重要作用。极化数据的权重和(314.88)低于光学数据的权重和(361.43)。表11表示20 m分辨率的光学数据和时序SAR数据的单独分类结果。光学数据的分类总体精度和Kappa系数分别高于时序SAR数据6.22%和0.077 4。但20 m多光谱光学数据相对10 m的光学数据,分类总体精度和Kappa系数分别提高1.34%和0.016 6,大蒜制图精度和用户精度分别提高0.49%和4.38%。可见,应用Sentinel-2光学数据在大蒜提取中,光谱分辨率占据优势。而时序SAR数据10 m分辨率的分类总体精度和Kappa系数高于20 m分辨率时序SAR数据的1.37%和0.017 3,大蒜制图精度和用户精度分别提高0.66%和2.03%。使用Sentinel-1时序SAR数据进行大蒜提取时,空间分辨率占据优势。
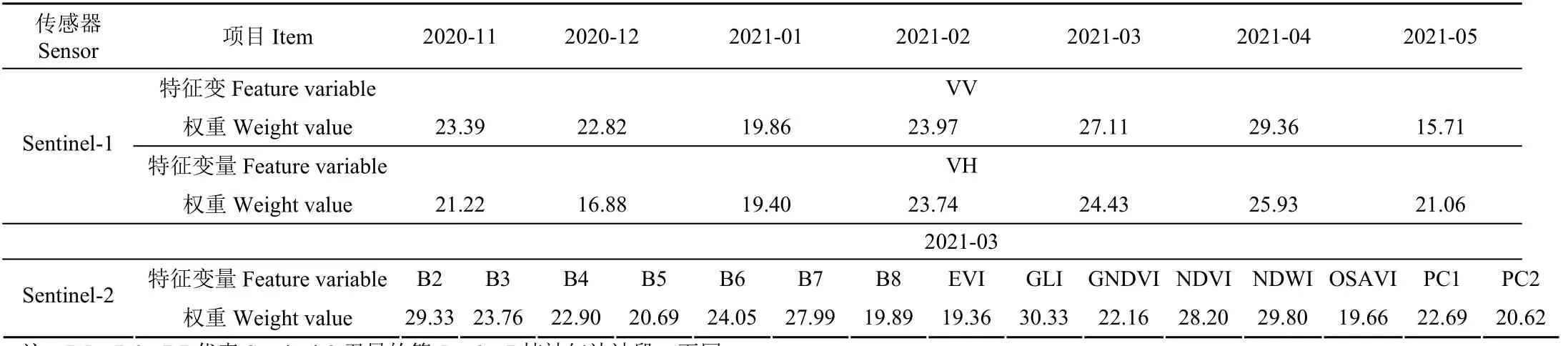
表10 20 m分辨率特征变量权重值 Table 10 Feature variable weight values of 20 m resolution
对比表9和表11,融合Sentinel主被动遥感数据总体分类精度分别高于光学数据和时序SAR数据0.03%和6.25%,Kappa系数分别高于两者0.000 2和0.077 6,大蒜制图精度分别高于两者1.32%和0.49%,大蒜用户精度分别高于两者0.36%和5.27%。综上,融合20 m分辨率Sentinel主被动遥感数据对大蒜的识别精度高于单独使用光学或时序SAR数据的识别精度;20 m分辨率时序SAR数据总体分类精度和Kappa系数低于光学的,对大蒜的识别精度也相对较低。
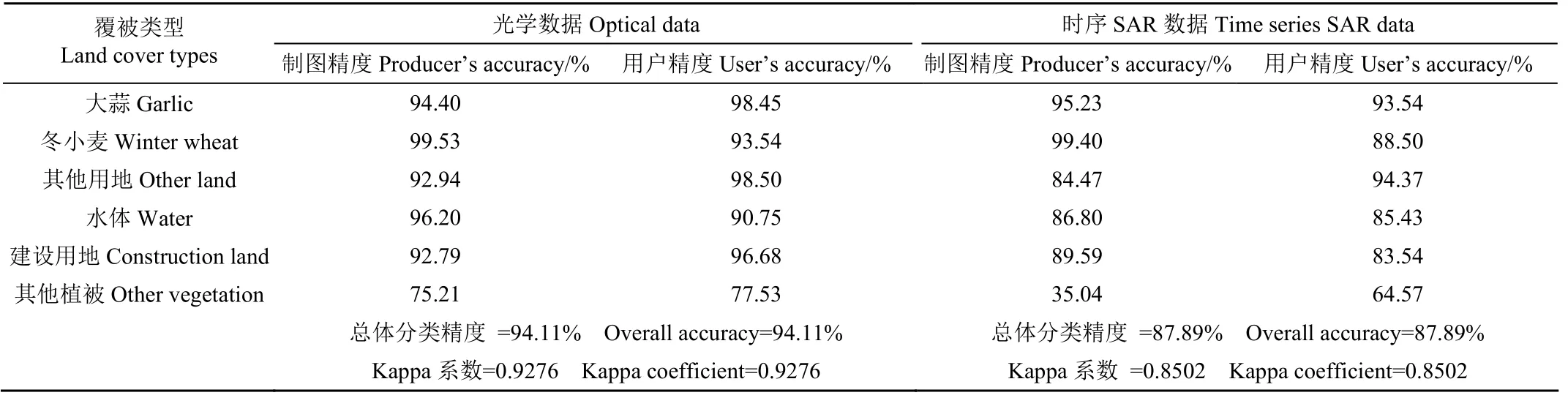
表11 20 m分辨率光学数据和时序SAR数据分类结果 Table 11 The classification results of optical and time series SAR data of 20 m resolution
4 结 论
本文基于GEE云平台、面向对象方法和RF算法,应用10 m高空间分辨率和20 m高光谱分辨率的融合Sentinel主被动遥感数据,通过最高分类总体精度和Kappa系数,筛选不同融合数据的SNIC算法最佳分割尺度,对比分析各融合数据不同特征变量组合对开封市大蒜识别精度的影响程度,得到如下结论:
1)使用10 m高空间分辨率或20 m高光谱分辨率的融合Sentinel主被动遥感数据,充分利用不同覆被的光谱信息和结构信息,大蒜的制图精度和用户精度均高于单独使用该分辨率的光学数据和时序SAR数据;融合10 m高空间分辨率的主被动遥感数据分类总体精度和Kappa系数最高,达到94.54%和0.93。
2)在种植结构复杂区域,无法获取大蒜生长期周期内光学影像时,10 m分辨率的多时相Sentinel-1 SAR数据可代替光学影像进行大蒜的提取工作。而单独使用Sentinel-2光学数据进行大宗、经济作物识别时,建议选取20 m分辨率的高光谱光学数据。
3)文中采用的SNIC、GLCM、PCA方法及其参数的确定,对提取相同或重叠生长周期的作物有一定的指导意义。特别是河南焦作市的“四大怀药”与秋季作物花生、玉米在作物生长周期上重叠,增加光学数据的提取难度。在进一步经济作物识别研究中,尝试应用该方法提取“四大怀药”种植范围。
本研究在Windows10系统、i7-9700K处理器、Nvidia GeForce-RTX-2060显卡和64 G内存下运行GEE,计算开封市6 444 km的每个结果总体耗时大约为6分钟,相比于传统的影像下载、大气校正、几何校正、拼接、裁剪等耗时几天的人工处理流程,GEE显著提高数据计算分析效率。高分三号SAR卫星于2016年8月发射,结合更高分辨率的高分系列光学数据,本研究可为高分数据提取破碎地块大蒜研究提供理论依据。本文仅讨论了使用单时相的Sentinel-2光学数据,未处理“异物同谱”的像元对面向对象分类精度的影响。在后期的研究中,进一步探究应用多时相光学数据或混合像元分解方法对分类精度的影响。
猜你喜欢
初中生学习指导·中考版(2022年4期)2022-05-12 00:12:51
今日农业(2021年19期)2021-11-27 00:45:49
中学生数理化(高中版.高考理化)(2021年5期)2021-07-16 05:32:06
软件(2020年3期)2020-04-20 01:45:18
摄影之友(影像视觉)(2018年12期)2019-01-28 09:01:00
金桥(2018年1期)2018-09-28 02:24:48
小学生作文(中高年级适用)(2018年6期)2018-07-09 03:08:50
海峡姐妹(2018年5期)2018-05-14 07:37:15
Coco薇(2017年8期)2017-08-03 15:23:38
Coco薇(2015年5期)2016-03-29 23:22:15