量子光通信中位置修正单检测控制方法
2022-04-15 09:17李志俊
光电工程 2022年3期
李志俊,毛 耀,亓 波,周 翕,刘 琼,周 倩
1中国科学院光电技术研究所,四川 成都 610209;
2中国科学院光束控制重点实验室,四川 成都 610209;
3中国科学院大学,北京 100049
1 引言
量子光通信系统中,为了最大限度保证量子传输效率和膜系偏振保真度,接收端接收到的能量,必须达到一定的阈值[1]。但发送端发出的能量受限于星上载荷单光子源的亮度,对通信光束的发散角提出了非常苛刻的要求。捕获、跟踪、对准(acquisition、tracking、pointing,ATP)作为量子通信大系统中的光束精密捕获跟踪结构,对量子通信的性能起到了至关重要的作用[2-10]。因而,对ATP 系统的跟踪精度也提出了更高的要求[2-3]。为了积累更多的量子密钥数据[4],需要ATP 系统在保证5 μrad 跟踪精度下,具备从仰角5°到85°的大动态范围的持续跟踪能力[5]。为保障跟踪精度与跟踪范围,目前大都采用粗精跟踪的复合轴跟踪模式[6-8],较小的精跟踪视场可保障系统的跟踪精度,而较大视场的粗跟踪可保障系统的跟踪范围[9-12]。虽然学者们对于粗精跟踪部分均进行了各种先进控制方法设计[13-32],但值得注意的是,在粗精跟踪复合轴模式下,粗精跟踪视场的大小与比值有一定限制。在精跟踪视场一定的条件下,如果粗、精视场的比值过大,即粗跟踪视场过大,在粗电视图像分辨率一定情况下,粗电视像元分辨率较低,粗跟踪误差较大,不利于粗精复合轴跟踪系统的稳定和平稳过渡;而如果设计较小的粗电视视场,虽然有利于粗精电视匹配,但这会造成捕获时间较长,甚至引导目标的误差远超捕获视场,存在无法完成捕获的风险。因此,传统的基于粗、精两个跟踪视场的ATP 系统复合轴架构已经不能满足要求。为解决这一问题,在ATP系统现有光路架构基础上增加了一级过渡视场,同时增加该过渡视场相应的跟踪镜,形成了精跟踪、高精跟踪双快速控制反射镜串联结构。这种结构中,大行程低带宽的快速偏转反射镜搭配低采样频率的精跟踪探测器首先形成精跟踪闭环,完成大范围低带宽的精跟踪;在此基础上,再利用小行程、高带宽的另一个快速偏转反射镜搭配高采样频率的高精跟踪探测器形成高精跟踪闭环,实现高精度高带宽的高精跟踪[22]。两级跟踪结合给粗、精跟踪结构提供了一个缓冲带,可以在保障较大粗电视视场的同时实现跟踪过程的平稳性。
为了进一步提高控制精度,过去采取的方式是:在精电视、高精电视双闭环稳定后,大行程的跟踪镜也采用高帧频的高精电视进行闭环,形成了单检测控制结构。但这种结构的参数整定是基于对象特性变化不大的情况,同时还要对目标特性进行精确标定,以便于精跟踪和高精跟踪进行精确解耦,控制器调试复杂,目标与背景变化较大条件下,系统鲁棒性较差。
本文提出在高精跟踪的内部加入相对角度传感器,在高精电视闭环的基础上加入位置内环闭环,一方面提高控制对象本身的确定性,便于参数整定,另一方面,将此传感器的偏差用于精跟踪闭环,避免了系统解耦问题。
本文首先对双跟踪镜系统进行介绍,包括系统光路、控制流程和复合轴控制结构,当前采取解耦方式的参数设计以及稳定性分析,根据实际情况,分析当前方法所面临的问题,然后提出基于修正模式的双反射镜单检测控制方法,同样分析其校正参数设计及稳定分析。最后按照分析结果,通过实验验证了理论的正确性。
2 系统介绍
2.1 系统光路结构和控制流程
某量子光通信设计的ATP 光路如图1 所示,M1为主镜,M2 为次镜,AS 为粗探测相机,TS1 为精探测器,TS2 为高精探测器。量子通信光传输过程为:850 nm 量子光、532 nm 信标光和可见光经过主镜、次镜和精跟踪镜传输后到达准直镜头,经过准直镜头准直后经高精跟踪镜反射后,到达分光镜1,量子光反射进入量子接收模块,532 nm 信标光经高透传输后到达分光镜2,其中一部分光作为时间同步光进入同步光探测模块,其余光和可见光经成像透镜聚焦后到达分光镜3,分别经过反射和透射到达精跟踪探测器和高精探测器。

图1 双跟踪镜串联式复合轴控制光路图Fig.1 Compound axis control optical path diagram used series double tracking mirrors
ATP 系统的跟踪控制流程根据探测器视场中信标光的分布情况分为两个阶段:
第一阶段,首先系统引导信标光进入粗探测视场,机架采用粗探测器闭环,信标光进入精探测视场,精跟踪镜采用精电视脱靶量进行闭环,信标光进入高精探测器视场,高精跟踪镜采用高精电视脱靶量进行闭环。
第二阶段,高精跟踪镜闭环后,精跟踪镜也采用高精电视脱靶量信息进行闭环。
2.2 复合轴控制系统简介
如图2 所示,复合轴控制是光电跟踪系统中常用的一种提高跟踪精度和响应频率的技术,原理是在机架主轴的基础上插入带宽更宽的快反镜子轴,利用其带宽校正粗跟踪的跟踪残差,可以对系统整体跟踪精度有数量级的提高。同样地,这种思想也推广,任意一个相对大范围低带宽低精度的主轴和一个相对小范围高带宽高精度的子轴共同作用完成跟踪,这种结构都可以认为是复合轴结构。
在图2 的复合轴控制框图中,机架的控制对象为G,机架控制器为C,粗电视特性为A,精跟踪镜对象特性为G1,外部控制器为C1,高精跟踪镜对象特性为G2,外部控制器为C2,精电视特性为TS1,高精电视特性为TS2。
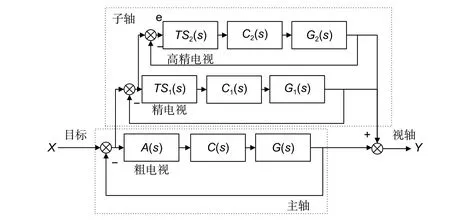
图2 复合轴控制框图Fig.2 Compound axis control
第一阶段,机架采用粗电视AS闭环,精跟踪镜采用精电视TS1闭环,高精跟踪镜采用高精电视TS2闭环,机架和精跟踪镜与粗电视AS、精电视TS1构成双检测复合轴控制结构,这是传统的机架和跟踪镜组成的双检测型复合轴控制结构,是第一级复合轴控制;同样地,精跟踪镜和高精跟踪镜与精电视TS1、高精电视TS2也构成双检测复合轴控制结构。这种结构,精跟踪和高精跟踪有各自的探测视场,两个探测器及其控制结构互不耦合,精跟踪和高精跟踪通过串联的方式,组成了第二级基于跟踪镜的双检测复合轴控制系统。
第二阶段,机架仍然采用粗电视AS闭环,精跟踪镜和高精跟踪镜都采用TS2进行闭环,精跟踪镜和高精跟踪镜与高精电视TS2构成单检测复合轴控制结构。这种结构,精跟踪和高精跟踪都采用同一探测器进行闭环,控制结构相互耦合,形成单检测型复合轴控制结构。由于高精电视相对于精电视具有更高的分辨率和更小的噪声,此方法可以获取更高的跟踪精度[13-14]。
3 基于图像闭环解耦的单检测复合轴控制
3.1 控制系统基本结构
在第二阶段,粗跟踪部分仍利用粗电视闭环,精跟踪镜和高精跟踪镜都采用TS2进行闭环。忽略粗跟踪部分,精跟踪镜和高精跟踪镜与高精电视TS2构成单检测复合轴控制结构。单检测型复合轴控制系统的位置传感器只有一个高精电视探测器,其结构如图3所示。

图3 单检测型复合轴控制框图Fig.3 Compound axis control used single detection
误差的传递函数为

闭环系统的特征方程为

单检测系统的特征方程除了包含主子轴特征方程的乘积外,还包括了解耦回路L的传递函数。因此,单检测系统的稳定性不仅由主子轴的稳定性决定,还与系统的解耦回路相关。如果主轴和子轴都稳定,并不能推出系统是稳定的。
上述特征方程中的解耦回路部分为(L-TS2)TS2LC1C2G1G2,若该部分为零,则主子轴之间实现解耦,即当L=TS2时,特征方程变为

系统稳定性仅由主子轴的稳定性决定。主轴和子轴稳定,则系统是稳定的。所以,只有当L=TS2时,系统两个轴之间的耦合被完全解除,单检测型系统的稳定由主子轴的稳定来决定。
当跟踪目标的信噪比特性较好时,探测系统的特性可以近似看作滞后环节,即:

其中 τ为探测器图像处理滞后时间。
在完全解耦的情况下,主轴、子轴的控制对象分别为:TS2G1和TS2G2,此时根据上述分析和式(3),单检测系统等效于双检测系统。由于G1和G2在探测器带宽范围内近似为1,所以控制对象简化为TS2,即变成对一个纯延迟环节的校正设计。
3.2 校正设计
若系统完全解耦,主轴、子轴的控制对象分别为TS2G1和TS2G2,对于跟踪镜系统,以精跟踪镜为例,其控制框图如图4 所示。

图4 精跟踪镜控制框图Fig.4 Control block diagram of fine tracking mirror
在高精探测器的范围内,精跟踪、高精跟踪对象特性可以近似为1,即:

高精电视脱靶量的对象传递函数为

两者的控制对象相同,都为一纯延迟环节e-τs,设控制器为如下形式:

闭环系统稳定的条件可以由开环系统的相位裕度和幅值裕度来决定,一般来说,要由大量文献和工程实践可以得到

3.3 稳定性分析
这里,系统的稳定性包含三部分,主轴的稳定性,子轴的稳定性,引入解耦环节后的系统稳定性。
考虑传递函数滞后的变化,若拟合的图像滞后为τ0,而实际对象的滞后变化为 τ,控制器按照拟合滞后进行设计,控制对象和控制器为

对于主轴和子轴的稳定性,因为控制器和对象相同,可以一并分析。主轴开环校正传递函数为C1·TS2,由幅值裕度和相位裕度进行稳定判定,由Gm=0和Pm=0得到:

由此可见,对于主轴和子轴,当 τ0<0.5τ时,系统不稳定。
从系统来看,由系统闭环特征方程式(2)和式(5)可得图像解耦模式下,单检测系统的等效开环传递函数为

因为拟合图像滞后为 τ0,则解耦控制器为

由式(10)和式(13)带入式(12),可得:

同样地,由幅值裕度和相位裕度进行稳定判定,得到:

综合式(11)和式(15),对于全系统来说,τ0=0.7675τ是该系统的稳定边缘,而当拟合的图像滞后τ0<0.7675τ时,系统解耦失败,系统不稳定。
3.4 基于图像解耦闭环方法的难点
3.4.1 参数整定稳定性
在前面的校正设计时,我们考虑高精电视的带宽范围内,精跟踪镜和高精跟踪对象传递函数为1,但在实际过程中,对象的特性会发生变化,比如不同姿态下,镜子的对象特性不一样。如图5(a)所示,精跟踪镜在70°、80°、90°不同的姿态角度条件下,精跟踪镜自身对象特性对比,在不同角度,镜子的低频增益和高频谐振有所不同,对象特性不一致对后面参数整定带来困难,如果采用同样的参数,系统可能存在不稳定情况。而采用闭环校正后(统一按照70°的对象特性设计控制器),其闭环后的对象特性如图5(b)所示,在高精电视范围内,对象的传递函数为1。引入内环后,提高了系统自身的对象确定性,为后面的参数整定提供了方便。
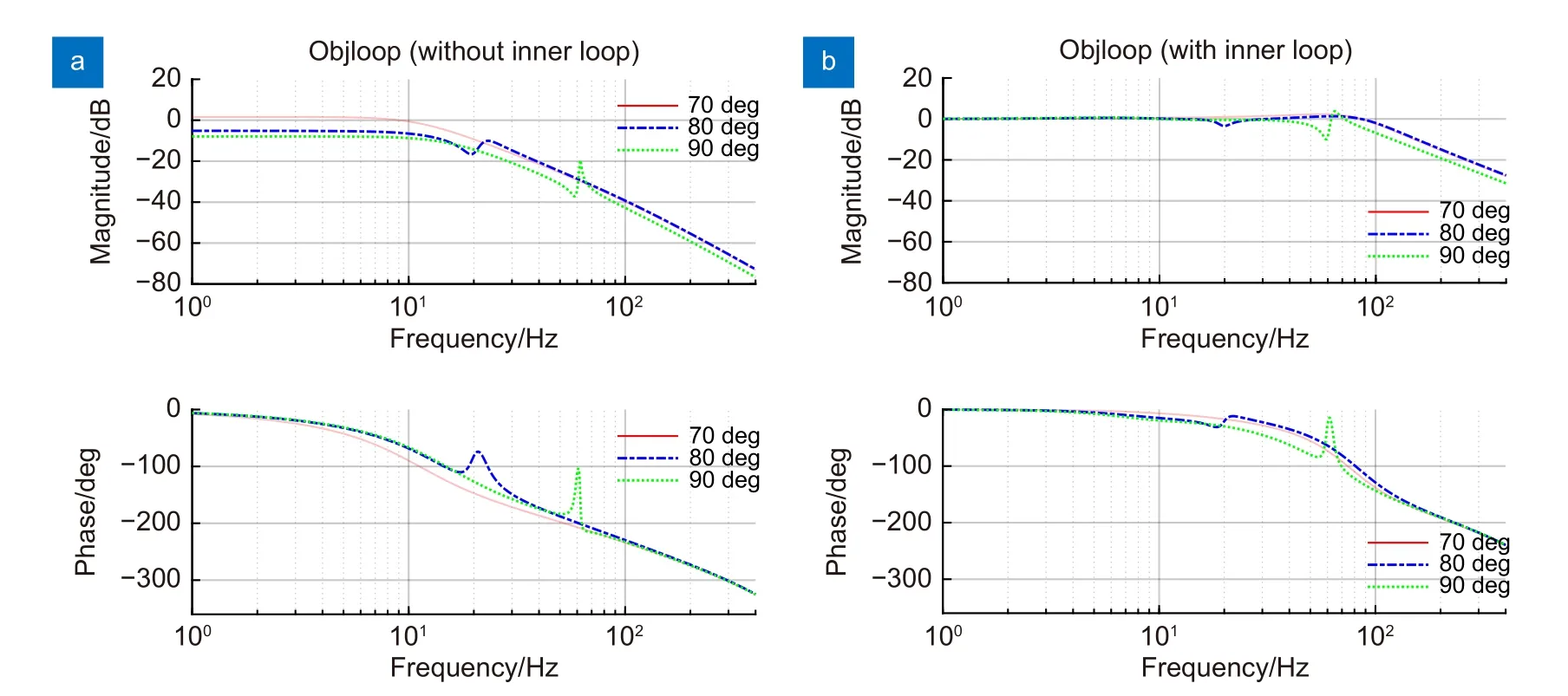
图5 跟踪镜不同姿态对象特性对比(不加入内环和加入内环对比)。(a) 不加内环;(b) 加内环Fig.5 Comparison of characteristics of objects with different attitudes of tracking mirror (without inner ring and with Inner ring).(a) Without inner ring;(b) With inner ring
3.4.2 目标特性变化
对电视的滞后,我们等效为一纯滞后环节。但实际跟踪过程中,由于受大气湍流影响,不同的目标、不同时段图像千差万别,如图6 所示。点目标变为扩展目标,图像的跟踪提取窗口大小需要自适应调整,在图像较弱时没法提取时还要采取图像帧累加,造成图像提取的延迟发生变化。

图6 不同时段高精电视图像Fig.6 High precision TV images in different periods
滞后不一样,如果用单一的某个图像算法的时间滞后去整定参数,可能会造成单个的主轴或子轴系统本身不稳定,如图7 所示,电视采样为50 Hz,滞后分别为2 帧、3 帧、4 帧和5 帧情况下,都用2 帧对象特性进行参数校正的开环校正特性。从图中可以看出,随着滞后的加大,相位裕度和幅值裕度逐渐降低,直至系统不稳定。当滞后变化为原来一倍时,系统处于临界稳定中,这也验证了之前对主轴和子轴轴稳定性的分析。另一方面,滞后的变化还会造成解耦不准。如果L≠TS2,由前面的分析可知,系统的稳定性还与解耦回路相关,解耦回路若给系统带来了不稳定极点则也可能会造成系统不稳定。
4 基于位置修正的单检测复合轴控制
4.1 控制系统基本结构
为了提高对象本身的稳定性,在高精电视的内部加入位置传感器进行闭环,如图8 所示。采用此传感器闭环后,系统内环的带宽提高,不同姿态下,对象增益和特性稳定,有利于外环参数整定。如图9所示。
为了克服图像处理滞后变化大,造成解耦困难影响系统稳定性的问题,我们提出采用高精跟踪内环的位置偏差量去修正精跟踪镜偏转,实现精跟踪的复合轴控制。这种模式如图10 所示。在这种模式下,高精跟踪闭环后,由于内部有位置传感器,位置传感器的偏差可以反映出高精跟踪目标脱靶量的偏移,通过将位置传感器的偏差引入到精跟踪进行修正,可以减小跟踪镜的偏转角度(反射镜偏转范围有限),从而达到跟踪目的。
如图10 所示,给定目标位置X′,输出实际位置Y′,期望达到的控制效果为ΔX=X′-Y′→0,所以内环位置回路的开环校正对象特性为

图10 基于位置修正的单检测复合轴控制系统框架Fig.10 Single detection compound axis control system framework based on position correction

可见,对于主轴,其控制对象为高精跟踪的闭环特性乘以精跟踪的控制对象。
对整个系统来说,闭环误差传递函数:

位置修正模式下,单检测系统等效开环传递函数:

闭环系统的特征方程为

4.2 校正设计
对于子轴控制,控制器C1的控制对象为TS2G2,和基于解耦的单检测控制一样,可以设计控制器为

对于主轴,控制器C1的控制对象为Gobj,可得:

设C1为PI-PI 控制器,即:


即控制器C1为

4.3 稳定性分析
同样地,系统的稳定性包含三部分:主轴的稳定性,子轴的稳定性和引入位置修正后的系统稳定性。和前面分析一致,考虑不同的图像提取算法造成传递函数滞后的变化,若拟合的图像滞后为 τ0,而实际对象的滞后变化为 τ。
对于子轴,对象和控制器同基于图像解耦的单检测,所以稳定性分析是相同的,当子轴处于临界稳定时,有:

对于主轴,控制对象为Gobj,控制器为C1,由幅值裕度和相位裕度进行稳定判定,Gm=0和Pm=0得到:

在修正模式下,根据式(3)系统等效传递函数Gposcorrection,由幅值裕度和相位裕度进行稳定判定,Gm=0和Pm=0得到:
综合式(25)、式(26)、式(27)可得当τ0<0.7449τ时,系统不稳定。而采用传统基于图像解耦的单检测复合轴模式,由式(15)可知,当 τ0<0.7675τ时,系统不稳定。显然,在采用基于位置修正的单检测模式下,拟合图像滞后 τ0具有更大的稳定范围,当0.7449τ <τ0<0.7675τ时,位置修正的单检测是稳定的,传统的解耦模式下的单检测不稳定。由此可见,相对于传统的图像解耦模式下的单检测复合轴解耦方式,此方法对拟合的图像滞后具有更高的鲁棒性。
5 实验结果与分析
为了验证此控制算法,在实验室搭建了一套多跟踪镜试验平台,其光路如图11 所示。系统由激光器、精跟踪镜、高精跟踪镜以及CCD 高精电视组成。激光器安装在偏转镜上,可以通过偏转镜摆动模拟目标运动。精跟踪镜和高精跟踪镜的内部都含有位置传感器可以测量镜子的偏转量。为了更好验证电视滞后带来的影响,采用CCD 高精电视的帧频为50 Hz。CCD 靶面视场为3′,像元分辨率为256×256,图像处理单元再进行16 细分,分辨率为4096×4096。精跟踪镜和高精跟踪镜自身偏转范围为10′。偏转镜偏转范围为5′。

图11 实验平台光路图Fig.11 Optical path diagram of experimental platform
在精跟踪镜和高精跟踪镜内部,位置传感器闭环后,测试加入电视特性后的对象滞后(TS2G1或者TS2G2),如图12 所示。

图12 单检测复合轴控制对象特性Fig.12 Compound axis control object used single detection
电视校正范围内,G1对象特性和G2可以近似为1,可以拟合电视特性为

可见50 Hz 的电视滞后2 帧。
在解耦模式下,由式(9)得到:

在位置修正模式下,由式(20)、式(24)得到:

通过偏转镜摆动,带动激光器偏转,模拟目标运动,分别在三种模式下测量高精电视脱靶量误差。实验结果如图13 所示,其中,黑色曲线为系统不工作时的脱靶量误差,蓝色曲线是采用解耦控制下的脱靶量误差,红色曲线是采用位置修正模式下的脱靶量误差,扰动频率分别为0.1 Hz、0.3 Hz、0.5 Hz、1.0 Hz。可以看出,在低频段,动态滞后误差已消除,误差主要来源于传感器噪声,两者差别不大,在中频段,基于位置修正的方法对扰动的抑制略有降低,但总体上处于同一水平。在滞后精确拟合条件下,两种方法的跟踪精度总体处于同一水平。其跟踪结果如表1。

表1 滞后不变下的跟踪误差Table 1 Tracking error with constant lag

图13 相同滞后下跟踪方法结果对比Fig.13 Comparison of tracking results under the same lag
电视采用不同的提取算法,实际滞后加大,为了更好地验证前面的理论分析,电视滞后从2 帧变为2.65 帧,如图14 所示,有:

图14 滞后变化特性对比Fig.14 Comparison of hysteresis variation characteristics

对两种方法进行对比,如图15 所示,采用位置修正模式,系统能够稳定闭环跟踪。而采用精电视解耦方式,系统立刻发生震荡,不能稳定闭环,最终系统保护,完全无法跟踪目标,误差完全反映目标光束的抖动情况。其跟踪结果如表2 所示。

表2 滞后变化下的跟踪误差Table 2 Tracking error with variable lag

图15 不同滞后下跟踪方法结果对比Fig.15 Comparison of tracking results under different delays
图像滞后由2 帧变化为2.65 帧,其滞后变化满足0.7449τ <τ0=0.7547τ <0.7675τ,由前面的理论分析可得:在此滞后条件下,采用图像解耦模式系统不稳定,采用位置修正模式系统稳定,结合实验结果对比,验证了分析的正确性。
通过实验对比,可见在滞后变化情况下,位置修正模式有更好的鲁棒性,具有更广泛的工程实用价值。
6 结论
本文针对量子光通信中,低信噪比条件下,单检测复合轴控制系统存在的解耦,并且鲁棒性较差问题,提出了基于位置传感器修正的单检测复合轴控制系统。该方法一方面避免了系统解耦的设计,同时可有效提高系统对拟合图像滞后的鲁棒性。通过理论分析,基于位置传感器的单检测复合轴控制系统的稳定性与拟合图像滞后的大小相关,相较于传统单检测模式,本文所提方法在同等跟踪精度条件下,其稳定性可以容纳更大的图像滞后变化。实验表明:在用滞后的变化模拟图像特性较差及图像算法不同造成滞后变化的情况下,本文提出的基于位置传感器修正的方法具有更好的适应性和良好的通用性。可以预见,本方法将对量子通信的发展提供一定的理论基础。
猜你喜欢
现代电子技术(2022年18期)2022-09-17
科学技术创新(2021年25期)2021-09-11
现代畜牧科技(2021年4期)2021-07-21
中国交通信息化(2020年4期)2021-01-14
中华养生保健(2020年3期)2020-11-16
流行色(2020年9期)2020-07-16
中国惯性技术学报(2019年3期)2019-10-15
家庭影院技术(2018年9期)2018-11-02
CHIP新电脑(2017年6期)2017-06-19
北京航空航天大学学报(2016年7期)2016-11-16