
基于多源影像的“祝融号”火星车高精度定位
2022-04-15 10:10李达飞何锡明成子青钱雪茹万文辉
深空探测学报 2022年1期
王 镓,李达飞,何锡明,成子青,许 倩,钱雪茹,万文辉
(1.北京航天飞行控制中心,北京 100094;2.中国科学院 空天信息创新研究院,北京 100101)
引 言
2021年5月15 日,中国“祝融号”火星车成功登陆火星北半球乌托邦平原,首次独立在一次任务中成功实现了“绕、落、巡”探测目标[1],成为第二个有火星车成功登陆火星的国家。截至2021年8月15日,“祝融号”火星车已在火星表面运行满90个火星日,共获取约10 GB原始数据,圆满完成既定的巡视探测任务[2]。
火星车在火星表面进行科学探测,火星车的移动控制离不开导航定位技术的支持。精确地获得火星车的位置和姿态信息,不仅可以掌握火星车的状态确保其安全,还可以使火星车与地面测控站的通信天线具有更高的指向精度,减小增益损失;同时还能够为地面的遥操作规划提供重要的数据支持。由此看来,高精度的导航定位技术,对于确保火星车安全可靠巡视,完成既定的科学探测任务具有重要的应用价值。
以火星为代表的深空环境,没有全球导航卫星系统(Global Navigation Satellite System, GNSS)等直接定位信号。因此,需要依靠车载传感器(例如惯导、里程计及视觉相机等)实现自主定位[3]。但是,随着行驶距离增长,自主定位的累积误差不可避免。为降低定位累积误差对后续任务的执行风险,还需引入其它多源影像数据(例如轨道器影像),通过多源数据协同处理的方式来修正自主定位的累积误差[3]。
火星车的定位方法可分为绝对定位和相对定位两种。绝对定位是通过外部观测物体如星辰、轨道器等来确定火星车在火星的绝对位置(经度、纬度和高度)的方法。目前任务中,火星车绝对定位方法有如下几种。①无线电定位技术。借助中继探测器(环绕器或着陆器),根据无线电信号的多普勒频移来确定火星车在火星惯性参考系中的位置[4]。通过多次重复观测,在惯性系的定位精度可达1~10 m[5],转换至火固系,转换精度为±250 m[5]。文献[6]结合中国首次火星探测任务特点,初步分析使用无线电技术对火星车进行定位,精度可优于10 km。②基于控制信息的图像定位技术。利用高分辨率卫星图像作为底图,将火星车图像产生的正射影像同卫星图像叠加对比来确定火星车的位置[4]。文献[7]提到,该方法的定位精度可达优于轨道器影像1个像素。③基于位置圆的定位技术[6]。通过测定自然界中的天体位置来求解位置圆方程来实现绝对定位[8-9]。定位精度主要受限于敏感器(太阳敏感器和加速度计)测量误差。假定敏感器测量误差为0.1°,则定位精度不超0.2°,若火星半径取3 400 km[10],反映到距离上的定位精度约为12 km[5]。相对定位则是通过车载仪器设备如惯性导航器件、里程计、立体相机等来确定火星车相对于起始点的位置。相对定位都是通过递推实现的,行驶过程中缺乏外部控制信息校正,因而会存在累计误差。目前,已应用于火星车的相对定位方法有如下几种。①航迹推算法。基于里程计和惯性导航器件来计算火星车的位置和姿态,是一种器上实时自主定位方法[4]。缺点是在长距离定位时会随时间累积及车轮打滑而产生较大误差。“勇气号”(Spirit)和“机遇号”(Opportunity)火星车的设计精度为行驶距离的10%[11-12]。②视觉测程法。基于火星车连续拍摄的立体相机像对在二维影像平面和三维地面空间追踪特征点并估计相对的位置和姿态来实现实时定位[13]。为了保证前后立体像对间有较大的重叠和较小的目标形状变化,一般要求拍摄间隔不超过75 cm,成像方位角的变化不超过18°[14]。受车载计算机处理能力的限制,仅用于部分短距离路径上的局部定位(一般小于15 m)[15]。③光束法平差定位。将火星车在不同位置拍摄的立体像对连接起来构成影像区域网,通过摄影测量光束法平差来提高影像位置和方位参数以及火面相关点位置的精度和一致性,从而实现火星车的长距离高精度定位。在“火星探测器漫游者”(Mars Exploration Rover,MER)的测试精度可达到移动距离的2%[16]。
中国“祝融号”火星车在完成“着巡合影”后,单日移动距离由10 m拓展至约20 m。另外受传输带宽限制,一般来说火星车仅利用导航地形相机拍摄前进方向90°范围的影像,在行驶途中仅拍摄当前航向45°范围的影像。因此,给基于视觉的火星车高精度定位带来了不少挑战。本文详细介绍了基于多源影像的“祝融号”火星车高精度定位方法。在初始着陆火面阶段,利用环绕器高分相机(High Resolution Imaging Camera,HiRIC)影像、降落影像与火星车导航地形相机图像进行了由粗至精的着陆点定位;后续以着陆点位置为基础,利用视觉的方法实现了火星车各站点的连续稳健定位。
1 多源影像和定位方法
1.1 火面多源影像
火星表面大范围、高分辨率的轨道器影像产品不仅对预选着陆区的观测和后续任务规划十分重要,而且还是火星车初始(即探测器着陆点)定位的基准底图。中国“天问一号”环绕器搭载的HiRIC相机,以线阵推扫方式在一般区域可获取优于2.5 m/像素的全色光学图像,在重点区域可达0.5 m/像素[17];在近火点以多轨方式获取了幅宽约为9 km的预选着陆区影像,最终,中国科学院国家天文台月球与深空探测中心生成了高分辨率的数字高程模型(Digital Elevation Model,DEM)和数字正射影像图(Digital Orthophoto Map,DOM)。美国火星侦查轨道器(Mars Reconnaissance Orbiter,MRO)的高分辨率成像科学实验相机(High Resolution Imaging Science Experiment,HiRISE)影像分辨率较高,约为0.25 m/像素[18],但不是全球覆盖。美国国家航空航天中心(National Aeronautics Space Administration,NASA)戈达德太空飞行中心(Goddard Space Flight Center,GSFC)及相关团队制作了分辨率为128像素/(°)(赤道上相当于463 m/像素)的火星全球DEM[18]。中国高分影像的产品结果与MRO搭载的背景相机(Context Camera, CTX)和火星轨道激光测高仪(Mars Orbiter Laser Altimeter,MOLA)的一致性较好。与CTX二维位置的均方根偏差约为15 m ,与MOLA高程方向的均方根偏差约为10 m[19]。本文以“天问一号”探测器HiRIC影像的DOM和DEM作为基准底图,HiRISE影像的DOMs作为交叉验证。
“天问一号”探测器底部配置了GNC光学传感器,视角垂直向下面向火面,在进入、下降和着陆(Entry Descent and Landing,EDL)过程中会对火面序列成像。像幅为2 048×2 048像素,视场角为58°[20],在着陆过程中获取了分辨率由低到高的序列影像。然而,受通信传输数据量限制,相邻影像成像间隔较大(约为5 s),整个降落过程的影像仅为约80幅,且并非所有数据都立即下传。因此,在“祝融号”着陆初期仅利用降落影像进行着陆点定位非常困难。“祝融号”火星车的桅杆上安装了双目导航地形相机(Navigation Terrain Camera,NaTeCam),可以在偏航和俯仰方向进行转动[21],车体前后分别安装了两对避障相机,采用鱼眼镜头,可分别为车前、后轮区域提供更大的视场。在发射之前,导航地形相机和避障相机的内参数和安装参数均在地面进行了精确标定。
1.2 火星车定位方法
“天问一号”着巡组合体在初始着陆火面后(“祝融号”火星车与着陆器尚未分离),首先利用惯导系统提供的姿态和绝对位置,建立着陆点坐标系O−XYZ,原点为火面着陆点,正X轴沿着当地正北方向,正Z轴指向火心,正Y轴与正X轴、正Z轴构成右手系。然后再利用图像匹配的方法对该坐标系(经纬高)进行精化,此后该坐标系唯一确定且保持不变。接着,根据火星车与着巡组合体的几何安装关系,以着陆点坐标系为参考基准,建立“祝融号”火星车的工作坐标系W−XYZ,指向与着陆点坐标系相同,原点为火星车的某个站点。车载的惯导系统、里程计设备以及基于视觉的定位方法均是以当前工作系为基准,确定火星车站点的相对位置。因此,通过站点、工作坐标系、着陆坐标系的一系列转换,可以实现火星车的绝对定位,相应的实现流程如图1所示。
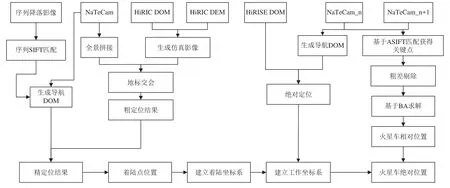
图1 基于多源影像的“祝融号”火星车定位实现流程Fig.1 Workflow of the proposed method
1.2.1 由粗至精的着陆点定位
基于多源(包括环绕器HiRIC影像、GNC降落影像与火星车NaTeCam影像)影像实现了着陆点由粗至精定位。首先通过在NaTeCam图像上确定的地标点同环绕器高分影像进行匹配,利用地标三角交会定位方法计算得到初始定位结果。随后,利用后续下传的GNC降落影像,选择其中4幅图像进行了降落图像与环绕器HiRIC图像匹配精化定位结果。最终,利用NaTeCam DOM与降落影像进行匹配,确定了着陆点的位置。
1)基于地标交会的粗定位
首先对环拍的NaTeCam图像采用圆柱投影进行全景图拼接处理。远处因地形起伏出现了若干类似山峰的尖角特征可认为是候选地标,这些特征均可通过其在NaTeCam图像的位置计算得到观测的方位角。考虑到NaTeCam图像与环绕器HiRIC影像的观测视角差异较大,难以直接进行特征关联,因此,开发了基于轨道器影像DEM和DOM的仿真系统,可以生成多视角的模拟导航地形图像,如图2所示,其中红色圆圈代表火星的地标。

图2 导航地形相机图像和仿真图像[20]Fig.2 Original and simulated NaTeCam images[20]
依据拼接图像转换参数将全景图上的每个地标像点位置计算至原始NaTeCam图像上。每一幅NaTeCam影像的外方位元素可通过车体航向和桅杆3个关节角计算得到。通过影像外方位元素及地标在影像上的像点位置,基于共线方程可直接计算地标方位角。基于最小二乘,着陆点位置可通过最小化地标方位角误差计算得到。然而,由于NaTeCam外方位元素的不确定性,还需通过与后续获取的降落图像进行匹配对该结果进行精化。
2)基于图像匹配的精定位
为提升定位精度,接着利用基于降落图像匹配定位方法对基于地标交会的粗定位结果进行精化。高度最低的降落图像的中心通常被认为是着陆点位置。通过SIFT方法进行降落图像间的匹配,相应匹配结果用于着陆点在序列图像中的追踪。以地标交会定位结果为基础,将降落图像匹配至环绕器HiRIC影像上,进而完成HiRIC DOM上的着陆点定位。考虑到最低一幅降落图像获取的高度距离火面还有一段距离,不能忽视由于可能的倾斜降落而导致的着陆点位置偏移。进一步将该降落影像与NaTeCam的DOM进行校准并匹配,从而实现对着陆点位置的精化。
1.2.2 相对定位与绝对定位相结合的站点定位
“祝融号”火星车站点定位除了采用航迹推算法进行器上自主定位外,还采用了基于多源影像进行视觉定位的地面修正方式。基于影像的定位方式又可分为跨站的视觉相对定位和基于DOM匹配的绝对定位两种。前者作为火星车遥操作任务过程中的标准方法,以确保对所有站点实现连续定位;后者是在火面地形具备明显特征的情况下附加使用的方法[22]。
1)基于光束法平差的跨站相对定位
首先根据航迹推算法得到的初始定位结果和相机的安装矩阵计算相邻站点的相机初始外方位,以此估计两站点间的重叠影像及范围,将其作为初始匹配区域,限制搜索范围,以提高后续匹配的可靠性。然后利用Affine-SIFT算法在初始匹配区域进行特征点检测,并采用基于欧式距离一致性原则进行粗差剔除。最后由光束法平差求解影像的外方位参数,进而推算出火星车的当前位置[23]。以此类推从而实现各站点间火星车的连续定位。实际应用中,由于火星车每次移动距离较远(10 m左右),有时会由于相邻站图像的成像角度差异过大,从而使得影像间相关性减弱;或是缺乏明显的地物特征等,以上这些因素会导致并不是所有站点都能自动实现定位。当自动匹配定位困难时,需人工辅助选择连接点。
2)基于DOM匹配的绝对定位
基于DOM匹配的定位方法是利用NaTeCam生成的DOM与轨道器高分辨率影像的DOM进行特征匹配,依据匹配结果可实现火星车在轨道器高分辨DOM影像上的绝对定位。该方法可以有效消除基于光束法平差定位的累计误差[22]。但仅限于某些具有明显特征(如小陨石坑和大岩石)的站点。例如,可以利用着陆区多石块的特点,通过提取、匹配火星车影像与HiRISE图像中的石块实现火星车在HiRISE图像中的定位[3]。文献[7]中提到,使用“勇气号”火星车和高分辨轨道器影像数据,已实现了定位精度优于HiRISE影像1个像素。基于DOM匹配的绝对定位方法,在“嫦娥三号”任务中也进行了验证,将导航相机生成的DOM(分辨率为0.02 m/像素)与降落相机生成的DOM(分辨率为0.05 m/像素)进行匹配,定位精度可以达到底图1个像素[22]。
相对定位和绝对定位两种方法相辅相成,相对定位虽然能实现连续跨站定位,但误差会随行驶里程累积;绝对定位不存在误差累积,但使用条件高度依赖于火面地形特征,并且需要轨道器高精度DOM影像作为基准底图。
2 多源影像定位法的实验验证及工程实践
2.1 实验验证
本文利用“嫦娥五号”任务相关数据检验了着陆点定位方法的精度,在实验室构建了立体导航系统对站点定位进行了精度分析。
2.1.1 着陆点定位前期验证
使用“嫦娥五号”任务动力下降过程的降落影像,基准底图选用“嫦娥二号”DOM,对前文所述的基于视觉的着陆点定位方法进行验证。
首先,将分辨率接近“嫦娥二号”底图的降落影像通过相同特征(如陨石坑)匹配和投影变换校正并配准到底图上,见图3(a)。然后,将更高分辨率的降落影像按顺序校准并配准到底图上,见图3(b)。位于最后一幅图像中心的位置即被确定为“嫦娥五号”着陆点的位置,即在“嫦娥二号”DOM中(51.916 2°W,43.058 4°N)[24],见图3(c)。
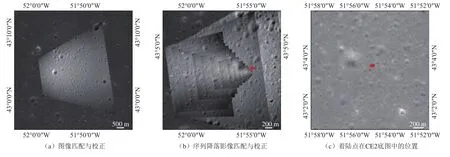
图3 基于视觉的着陆点定位[24]Fig.3 Image-based localization of the lander[24]
为了进一步验证,利用名称为M1132169436[25]的LROC NAC 影像制作了LROC DOM。在该DOM上,着陆点的位置被确定为(51.915 6°W,43.059 1°N),见图4(a)。“嫦娥五号”着陆月面后一天 ,2020年12月2日14:53:55 UTC获取了着陆点的相关影像,见图4(b)[26],在这张图片中可以直接观察到着陆器。
实验表明,基于视觉的着陆点定位结果(CE2 DOM vs.LROC NAC DOM)之间的位置误差小于30 m;另外,基于视觉的着陆点定位结果(CE2 DOM)与LROC团队定位结果的位置偏差也小于30 m。
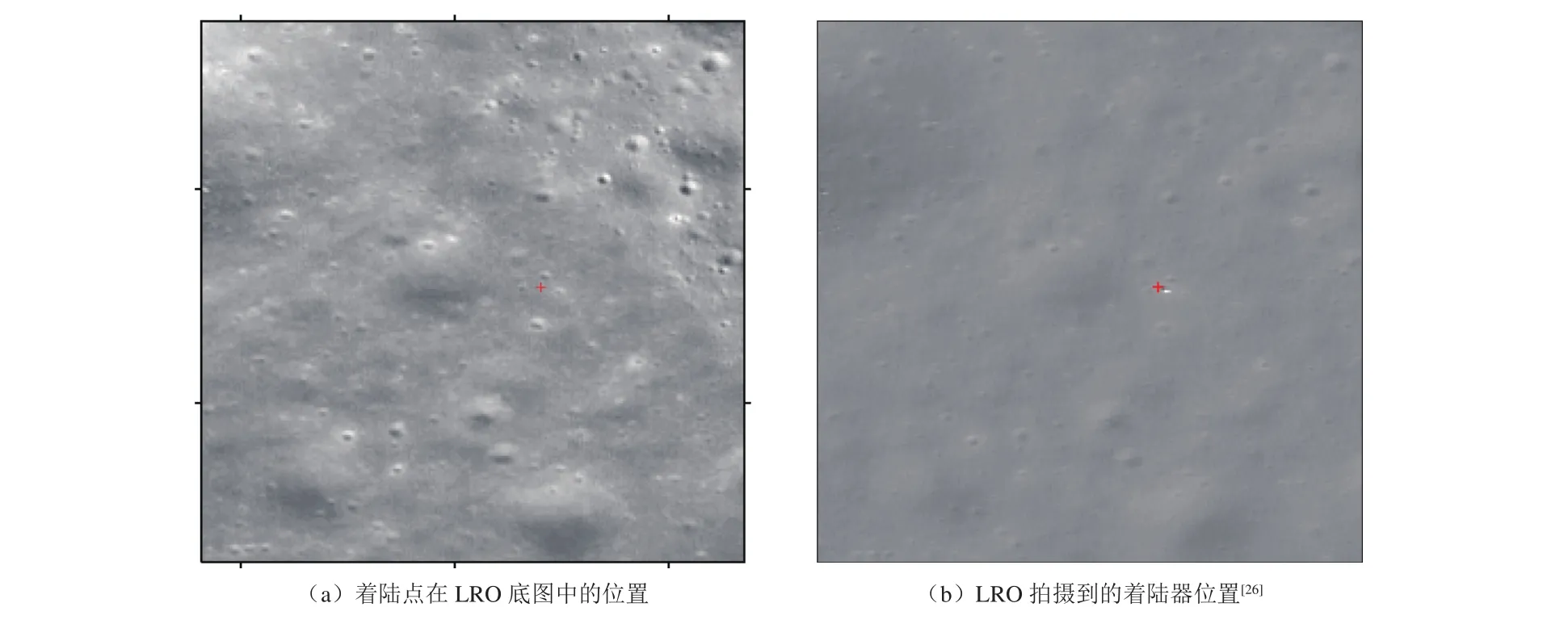
图4 着陆点定位结果比对[26]Fig.4 Lander localization comparison[26]
2.1.2 站点定位仿真验证
为了验证前文所述的相对定位算法精度,在实验室开展了如下模拟实验。双目CCD相机的基线约为262 cm,相机离地高度约为1.6 m,并对相机内外参数进行了精确标定。利用双目相机构成视觉系统,在试验场内获取相关图像,并进行定位计算。利用室内GPS测量两个站点的精确位置,测量精度优于0.3 mm。将测量值作为真值,将定位解算的结果与其进行比较,从而评价相对定位的精度,结果如表1所示。

表1 相对定位的仿真结果Table 1 Simulation results of relative location
由表1可以看出,在地面环境实现了3~11 m距离范围的定位,精度优于3%。定位结果的精度并不随距离的增加而降低或增高。定位精度主要与连接点的分布以及精度有关。因此,在实际工程应用时建议连接点的个数5~7个,且分布尽量均匀。
2.2 工程实践
“祝融号”火星车着陆火面后,利用多源图像进行匹配实现了着陆点精确定位,结果与后续“天问一号”环绕器对着陆区进行重复观测的结果一致。通过位置对比,视觉定位结果精度优于HiRIC DOM 1个像素[20]。后续,利用多源影像进行视觉定位的方法完成了火星车112个站点的连续稳健定位。图5为“祝融号”火星车的行驶路线和着陆区附近的坡度图,其中各个站点(包括着陆点)位置均为视觉定位结果,图5(a)红色五角星为着陆点,绿点为每个火星日的起始移动站点,黄色曲线为地面规划移动路线,绿色虚线为自主规划移动路线。底图为E S P_0 6 9 6 6 5_ 2 0 5 5_RED_A_01_ORTHO[28],分辨率约为0.3 m/像素;图5(b)底图为DTEEC_069665_ 2055 _069731_ 2055_A01[28], 分辨率约为1 m/像素。由图5可以看到,“祝融号”火星车着陆区整体较为平坦,着陆点以南3 km范围内的高程差不超过20 m,平均坡度约为3.8°,着陆点周围79%的撞击坑直径均≤10 m[27]。
2.2.1 着陆点定位工程实践及分析
如图6所示,首先将顶部环拍的(左)导航地形相机图像采用圆柱投影进行360°全景拼接,0°为正北,270°为正西。然后在拼接影像中选取远处因地形起伏出现的若干类似山峰的尖角特征为候选地标,图6中箭头1~8,其中白色箭头为地标。成像时导航地形相机的俯仰角为–5°,这些特征均可通过其在NaTeCam图像的位置计算得到观测的方位角。考虑到全景影像上与环绕器DOM的观测视角差异较大,难以直接进行特征关联,为此,开发了图像仿真系统,利用环绕器DEM和DOM仿真不同高度下的地标图像,通过变换连续视角辅助进行地标配对结果的验证。
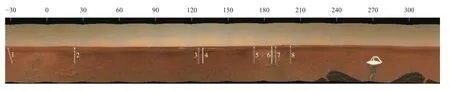
图6 导航地形相机的全景拼接图[20]Fig.6 The 360° panorama of NaTeCam images[20]
由拼接影像的转换参数可将全景影像上的每个地标像点位置计算至原始NaTeCam图像上。每幅NaTeCam影像的外方位元素可通过火星车车体航向和桅杆3个关节角计算得到。通过影像外方位及地标在影像的像点位置,基于共线方程可直接计算每个地标的方位角。基于最小二乘,着陆点位置可通过最小化地标方位角误差计算得到。在仿真图像的辅助下,可实现环拍影像与环绕器高分影像之间的地标配对,见图7,其中中心图像是环绕器高分影像的DOM,其余的均为仿真图像;绿点代表着陆点位置,红线代表地标的方位线。

图7 基于地标交会的初始定位结果[20]Fig.7 Initial localization result based on the landmark triangulation method[20]
通过方位角交会计算得到的粗定位结果为(109.93°E,25.07°N)。
在粗定位结果的引导下,从没有羽流效应的降落图像中选择4张(成像高度为1.3~0.08 km)进行图像匹配,并将它们与环绕器HiRIC DOM进行配准。为精化定位结果,将NaTeCam DOM(俯仰角为–30°)与降落影像进行匹配,如图8所示。最终的定位结果为(109.925°E,25.066°N),于2021年5月29日完成[20]。6月6日,HiRISE公开了“天问一号”的着陆区图像,该研究定位结果一并得到了验证。

图8 基于图像匹配的着陆点精定位结果及验证情况[20]Fig.8 Localization results based on image matching methods[20]
2.2.2 站点定位工程实践及分析
截止前100个火星日,火星车已累计移动112次,利用基于光束法平差的定位方法对所有站点进行了相对定位,由于相邻站点航向角的差异一般都不大(<30°),且移动终点位置都较为平坦(俯仰角、滚动角基本<3°),因此利用最小二乘解算相对位置通常能取得稳定的收敛结果。图9(a)展示了一个匹配示例,虚线边界为由初始定位结果预测的区域范围。在地面特征非常不明显的条件下,也采用人工选择连接点进行辅助定位。图9(b)为对望模式时,人工添加连接点的示例。

图9 相邻站的特征点匹配Fig.9 Feature matching in cross-site images
利用基于DOM匹配的方法对45个站点进行了绝对定位,由于两个DOM的分辨率差异较大(约为15倍),仅在一些具有明显火面特征的位置开展了相应的校正匹配工作,图10展示了NaTeCam环拍DOM与HiRISE DOM进行匹配校正的示例。
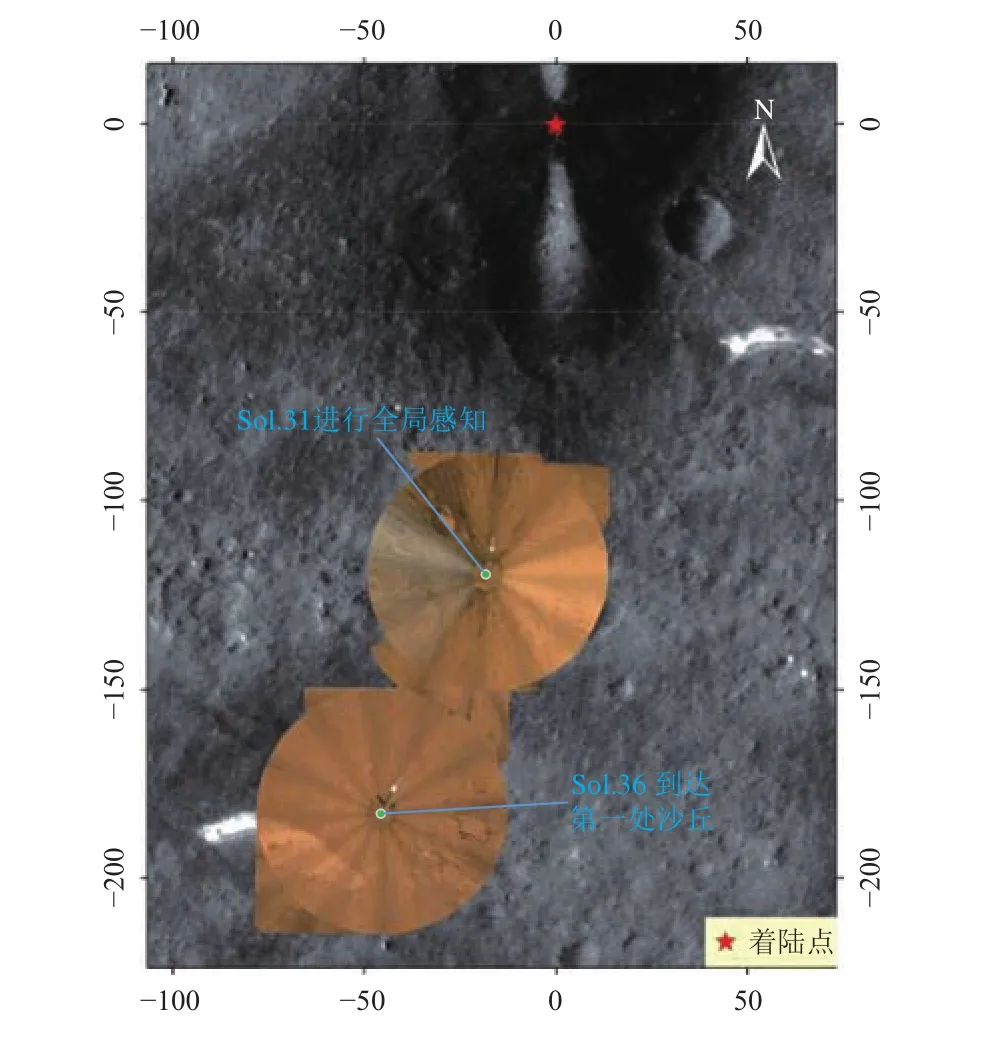
图10 导航地形DOM与HiRISE DOM进行匹配校正(底图为ESP_069665_2 055_RED_A_01_ORTHO)[28]Fig.10 Matching correction between NaTeCam DOM and HiRISE DOM.The base image is the ESP_069665_2 055_RED_A_01_ORTHO[28]
将DOM匹配获得的绝对定位结果作为站点真值,分别将航迹推算法(DR)和基于光束法平差法(BA)的二维定位结果与之进行比较(所有结果均转换至着陆坐标系下),来评价比较两种方法的定位精度。其中,把两种定位方法的定位位置与真值的二维平面差记为绝对定位精度,把绝对定位精度与里程的比值记为相对定位精度,如图11所示。

图11 两种方法定位结果比对Fig.11 Comparison of positioning results of the two methods
由图11可以看出,随着相对距离的增大,两种方法的绝对定位精度整体呈下降趋势。当两站距离为10 m左右时,BA的绝对精度优于0.5 m,相对定位精度优于4.1%;当两站距离为20 m左右时,BA的绝对精度优于1.2 m,相对定位精度优于6.5%。总体而言,BA精度略高于DR。但相对定位精度与里程不是一个线性比例关系。
3 结束语
本文详细描述了基于多源影像的“祝融号”火星车定位方法,首先利用地标交会和序列图像匹配实现了着陆点精确定位,定位结果优于HiRIC DOM 1个像素。后续利用基于BA的跨站相对定位和基于DOM匹配绝对定位两种互补方式实现了火星车各站点连续稳健高精度定位。将基于DOM匹配绝对定位的站点结果作为真值,对比了BA和DR的定位精度,总体来讲,BA精度略高于DR。
作为深空探测车行驶和探测的核心技术,导航定位技术已在月球和火星巡视探测任务中发挥了关键作用。目前研究和应用正朝着智能化、长距离自主导航定位等方向发展,需要深空探测技术人员和相关科研工作者共同努力攻关解决。
致 谢
感谢北京航天飞行控制中心张作宇工程师、吴凡工程师、王晓雪工程师为本文写作提供的帮助和支持。
猜你喜欢
环球时报(2022-08-22)2022-08-22
英语世界(2022年5期)2022-05-18
导航定位学报(2021年4期)2021-08-29
空间科学学报(2021年2期)2021-07-21
太空探索(2021年6期)2021-06-16
小哥白尼(神奇星球)(2020年12期)2021-01-18
军事文摘(2020年18期)2020-10-27
智富时代(2019年4期)2019-06-01
智富时代(2019年4期)2019-06-01
雷达学报(2017年1期)2017-05-17
