
月球永久阴影区着陆点选取要求的高分辨率极化SAR数据分析
2022-04-15 10:10:34柳钮滔施贤正金亚秋
深空探测学报 2022年1期
柳钮滔,施贤正,徐 丰,金亚秋
(复旦大学 电磁波信息科学教育部重点实验室,上海 200433)
引 言
月球两极太阳光无法到达的永久阴影区(Permanently Shadowed Regions,PSR)是月球有无水冰的主要研究聚焦点。随着“嫦娥五号”从月表采样返回,中国探月工程将进入下一个阶段。“嫦娥七号”任务中,携带有月球车和小型飞跃器的月球着陆器计划在月球南极区永久阴影区附近有太阳光照射的区域登陆,使月球车能够获取太阳能,而小型飞跃器也易于到达附近的PSR采样点进行采样与分析[1-2]。目前已经获得的数字高程模型(Digital Elevation Model,DEM)是一定尺度上的均值,光学相机也难以获取PSR内米级分辨率图像。极化合成孔径雷达(Polarization Synthetic Aperture Radar,Pol-SAR)可获取高分辨率与甚高分辨(0.5 m/像素)的全月面散射成像图[3],“嫦娥七号”上将搭载甚高分辨极化SAR,对全月球,包括两极PSR散射回波进行成像[1]。美国的“月球轨道勘测器”(Lunar Reconnaissance Orbiter,LRO)上搭载的微型雷达系统Mini-RF以简极化(Compact-pol)方式获得全月面的散射回波图像[4]。月表雷达回波与月表地形、媒质特性等参数有关[5-6],本文以Mini-RF的简极化雷达图像为参考,来分析SAR在选取月球表面平坦区域中的作用[7-8],为“嫦娥七号”月球极区和PSR区域的登陆点与采样点的选择打下基础。
Mini-RF发射圆极化信号,接收水平极化和垂直极化的雷达回波,工作频段为S频段(波长12.6 cm)和X频段(波长4.2 cm)[4],Mini-RF雷达获得极化散射强度的4个Stokes参数,能计算圆极化率(Circular Polarization Rate,CPR)、极化度(m)、相位差( δ )等极化参数[9-10]。
月球上发现的高CPR值曾被当作水冰存在的证据[11],但该结论至今存在争议[12-13],CPR并不是PSR有无水的关键证据。雷达观测也被用于反演月表介电常数[6,14-15],以及月表陨石坑定年的研究[16]。Raney[4,9]提出m-δ和mχ极化分解来区分月表回波的散射机制,Liu和Jin[9-10]通过仿真和数据分析了雷达入射角对散射机制的影响,以及几个极化参数之间的关联。由于以前的着陆点都在非永久阴影区,这些区域具有高分辨率的光学图像可供参考,鲜有学者将雷达图像用于寻找平坦着陆点。Liu和Jin[7]首次结合雷达图像和数字高程模型,以德·杰拉许(de Gerlache)陨石坑和斯莱特(Slater)陨石坑为例,考虑坑内外的月表面坡度、飞行距离、极区PSR的分布、SAR散射成像,给出了几条可供参考的登月与飞行路线。但是,文中尚没有雷达图像与光学图像的详细对比分析。
光学图像常常被用于选取太阳直射区域的平坦月面,本文根据“嫦娥四号”着陆器在悬停避障期间移动的距离,来确定需要回避的陨石坑大小[17],将陨石坑直径换算成像素点数作为识别标准,对比Mini-RF雷达图像和LRO光学相机的图像来分析雷达图像对影响着陆的陨石坑的识别能力。分别对比了直径50个像素以上的陨石坑,直径10个像素以上的陨石坑,以及像素尺寸陨石坑的雷达图像和光学图像,给出了不同尺寸陨石坑雷达图像和光学图像的对比实例,以及新鲜陨石坑溅射毯这类粗糙月表面雷达图像,介绍了入射角改变对雷达回波强度与极化信号的影响,以希吉努斯(Hyginus)陨石坑附近区域和“嫦娥四号”着陆区为例[18],分析了雷达极化的作用,并讨论了人工神经网络在月球雷达图像识别与分割中的作用[19]。在月球南极陨石坑中,对比舒梅克(Shoemaker)陨石坑和沙克尔顿(Shackleton)陨石坑的雷达图像和斜坡数据,挑选了一些平坦的月表面,以供将来“嫦娥七号”Pol-SAR探月的实际数据分析和研究。
本文结构如下:第1节介绍Mini-RF雷达数据,以粗糙面微扰近似法分析了局部入射角、表面介电常数和粗糙度参数等对后向散射系数的影响;第2节介绍雷达图像对不同直径陨石坑的识别能力;第3节讨论HRNet人工神经网络对雷达图像中陨石坑分割的能力;第4节结合雷达和月表面斜坡数据图像选取Shoemaker陨石坑和Shackleton陨石坑内部平坦的区域,作为应用个例;第5节给出结论。
1 Mini-RF雷达探测
1.1 Mini-RF雷达数据介绍
Mini-RF采用简极化工作模式,得到4个Stokes参数[20]

其中:下标L表示发射左旋圆极化波;下标H、V分别表示接收水平极化与垂直极化;I1为总回波强度;E是电场;Re和Im分别表示取实部与取虚部;< >表示多视平均[4]。
圆极化率CPR的定义是与发射电磁波相同圆极化分量(Same sense Circular polarization,SC)和相反圆极化分量(Opposite sense Circular polarization,OC)的比值,Mini-RF数据中CPR定义为[20]

其中:S是散射矩阵参数;下标R表示接收右旋圆极化成分。极化度的定义为[20]

去极化度(1–m)可以用于表示雷达回波中的随机成分[20]。
1.2 散射模型
月表面雷达回波与表面粗糙度、入射角、介电常数等因素有关,入射角较小时,镜面反射成分主导[21],在大入射角下,小尺度粗糙的贡献主导[22],Mini-RF在月表水平面上的入射角约为49°,该入射角范围内小尺度粗糙的散射成分主导,这里用微扰法来分析这些因素对雷达回波的影响,对于高斯粗糙面,后向散射系数可以写为[22-23]
其中:k为真空中的波数; δ为粗糙面的均方根高度;L为相关长度; θi为入射角;εr为相对介电常数;RH为水平极化的菲涅尔反射率。
发射左旋圆极化波,接收线极化波时的散射系数与线极化散射系数之间满足
其中:j为虚部单位。在一阶近似下,小尺度粗糙面的交叉极化项为0,由式(1)、(11)、(12)可得,雷达回波总强度I1正比于( σ0HH+σ0VV)/2 。
图1给出了微扰法计算得到的不同粗糙度和介电常数下的后向散射系数,随着入射角的增大,后向散射系数降低。陨石坑内部斜坡使得局部入射角改变,朝向雷达的坑壁入射角小,回波较强,而背向雷达的坑壁局部入射角大,回波较弱。
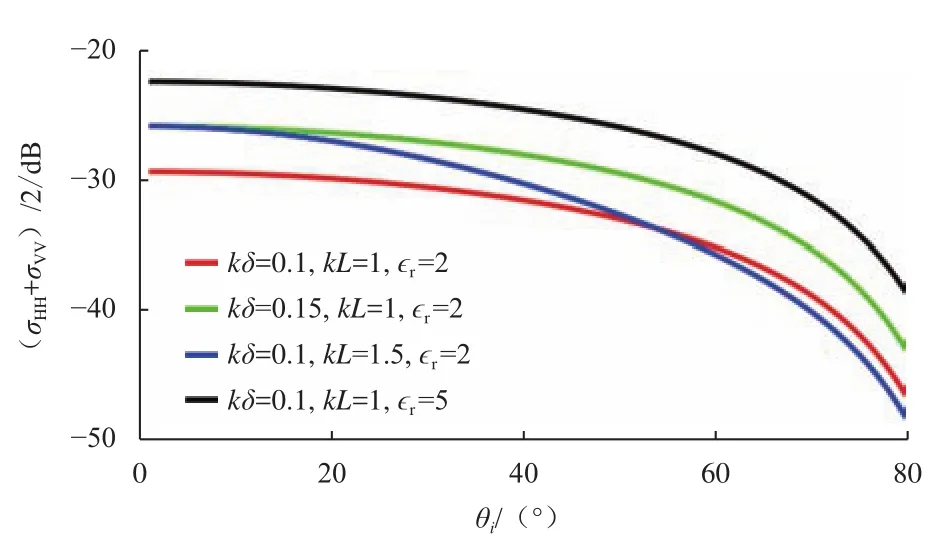
图1 粗糙面后向散射系数Fig.1 Backscattering coefficients of rough surface
媒质介电常数与粗糙度的改变也会使得雷达回波强度改变,介电常数越大,后向散射系数越大,后向散射系数还会随着粗糙面的均方根高度增加而增加,相关长度的增加使得大入射角区域的后向散射系数略有下降。
2 雷达对陨石坑的识别
“嫦娥四号”在悬停避障阶段向西南方向移动了12 m,穿过直径为25 m的撞击坑[17]。悬停避障过程中“嫦娥四号”进行了激光点云成像,来选取平坦的着陆区。
着陆器具有悬停避障的能力,在着陆前,可以使用分辨率0.5 m/像素的光学图像预先选定较为平坦的区域作为备选区。印度“月船2号”(Chandrayaan-2)全极化SAR的分辨率可以达到0.5 m/像素。以此作为参考,根据“嫦娥四号”在悬停避障期间移动的距离,这里假设飞跃器可以躲避25 m直径的陨石坑,在这样的假设下,SAR如果能探测直径25 m以上的陨石坑分布,就能在选址中起作用,这样的陨石坑在雷达或者光学图像中直径约为50个像素。
Mini-RF雷达分辨率为14.8 m/像素,直径为50个像素的陨石坑对于Mini-RF雷达数据来说,直径约为750 m,为了分析雷达对陨石坑等月表地形的检测能力,下面用直径750 m的陨石坑来检验Mini-RF的识别能力。
2.1 雷达对大陨石坑的识别
陨石坑是月表面的典型特征[18],本节选取位于Hyginus陨石坑(7.7°N,6.3°E)和“嫦娥四号”着陆点附近的雷达数据和光学图像[24],来判断Mini-RF雷达对陨石坑的识别能力。
图2(a)是Mini-RF雷达第一个Stokes参数(散射总强度)I1数据,分辨率是14.8 m/像素,位于Hyginus陨石坑附近,中心经纬度约为(7.3°N,6.2°E),雷达从右侧向左侧观测。陨石坑坑壁使得入射角改变,导致雷达回波强度发生改变,从而构成陨石坑的轮廓特征,这样的轮廓特征是由粗糙面雷达回波强度随入射角改变而导致的,受分辨率影响较小,在甚高频雷达图像中陨石坑依然具有这样的特征。
此外,一些新鲜陨石坑周围存在溅射区域,这些区域雷达回波也比较强。将雷达图像中可以识别的大陨石坑用红圈圈出,对应的区域也相应地在光学图像中标出,如图2(b)所示。
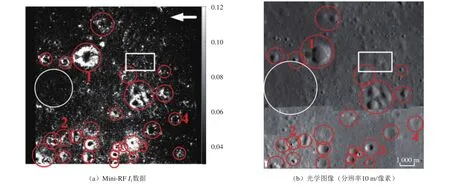
图2 Mini-RF雷达对750 m以上直径陨石坑的识别Fig.2 Identification of craters whose diameters are larger than 750 m with Mini-RF
绝大多数直径超过750 m的大陨石坑可以用雷达识别,红圈1内是图2中最大的陨石坑,直径达到1 km,回波明显强于周围平坦区域,构成圆形回波亮区,易于识别;红圈2附近的陨石坑覆盖率比较高。左侧的小陨石坑边缘覆盖有新的撞击坑,右侧呈现波浪式的凹陷,在雷达图像中这些地形变化导致入射角的改变,朝向雷达的斜坡回波较强,这类起伏地形可以在雷达图像中识别出来。红圈3是一个直径约为500 m的新鲜陨石坑,这个陨石坑周围的溅射毯区域覆盖有新鲜的月壤媒质和许多尺寸大于波长的石块,这类新鲜陨石坑内部和溅射毯区域一般具有强回波的特征。红圈4内的陨石坑比较平坦,雷达回波弱于红圈1内的陨石坑,但依然可以识别。
Mini-RF也能够识别直径小于50个像素点的陨石坑,图3对应图2白框内的区域,其中用红圈圈出的小陨石坑直径一般在10~30个像素之间,这些小陨石坑在雷达图像和光学图像中都可以辨别。
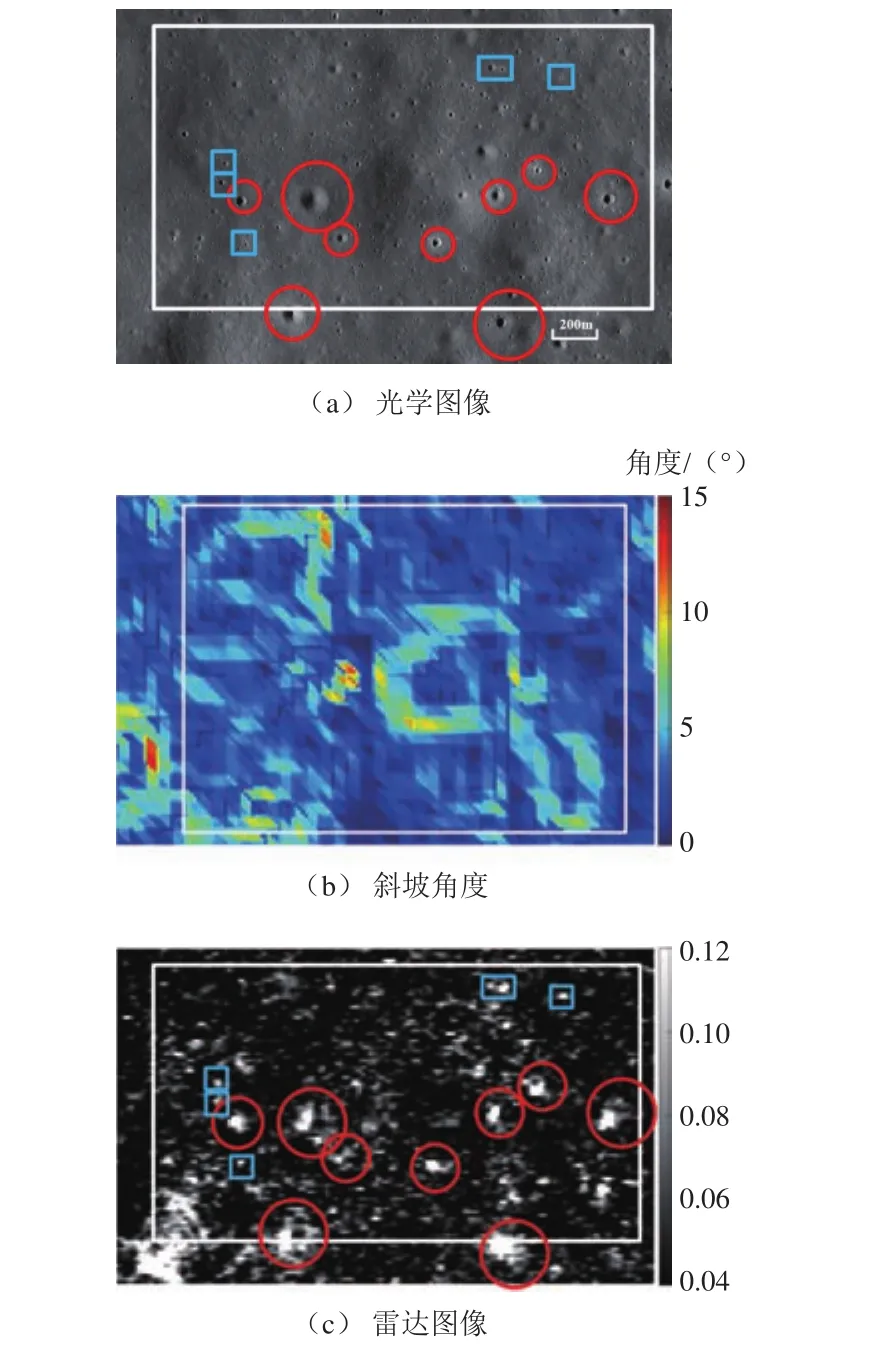
图3 难以识别的3个平坦大陨石坑和可以识别的小陨石坑Fig.3 Three undistinguishable flat large craters and distinguishable small craters
雷达图像中可以看见许多小亮点,这些亮点往往是一些像素尺寸的小陨石坑。图3中蓝色方框内的是像素尺寸小陨石坑,其中左下角的蓝框内小陨石坑的光学图像和雷达图像如图4所示。图4(a)蓝框内的小陨石坑对应图4(b)雷达数据中的亮点,而蓝框附近的平坦小陨石坑在雷达图像中难以识别。
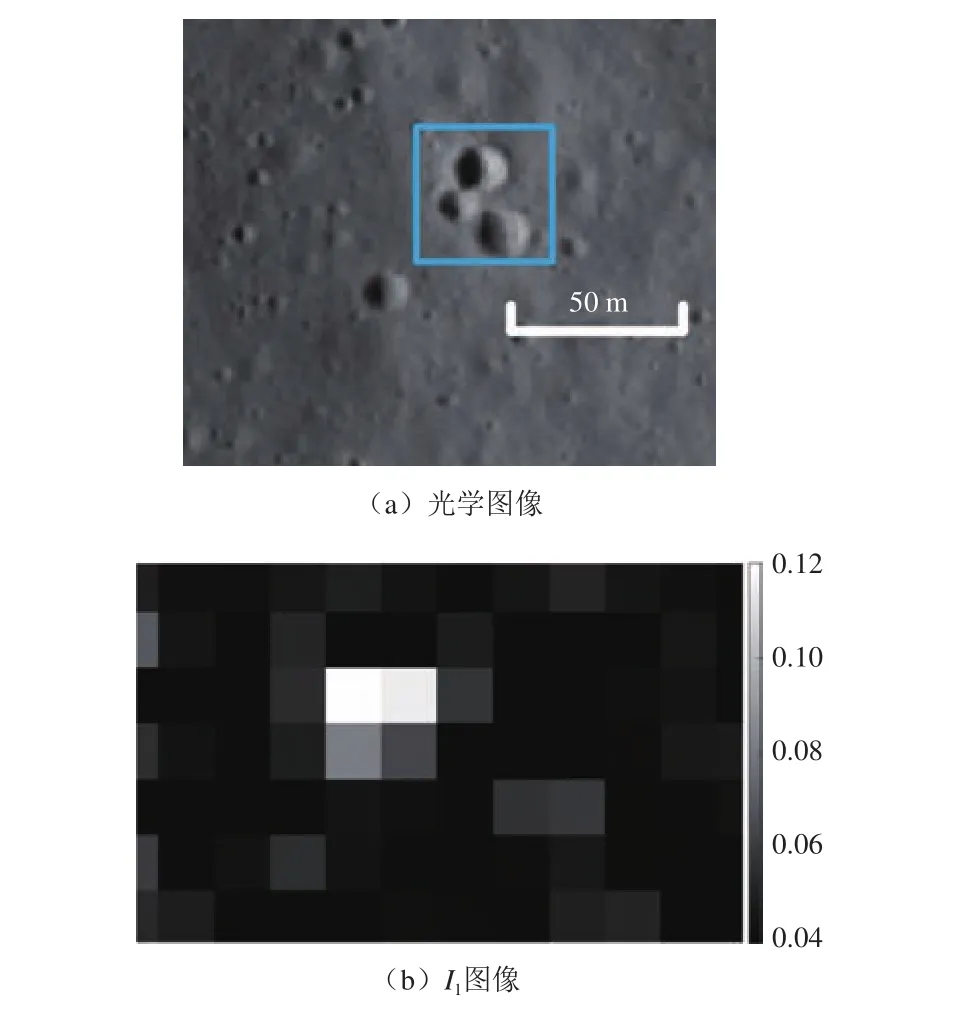
图4 像素尺寸的陨石坑Fig.4 Craters with pixel size
2.2 雷达图像中难以识别的陨石坑
图2中有少量平坦的退化陨石坑难以用Mini-RF数据识别,也就是白框内的区域。这个区域的光学放大图如图3(a)所示,该区域的中心经纬度约为(7.46°N,6.34°E)。其中有3个较大的平坦陨石坑,每个陨石坑的直径都能达到400 m。图3(b)是这3个陨石坑的斜坡数据,斜坡角度由LRO上的激光高度计获取的DEM数据计算而来[25],原始DEM数据的分辨率为59 m/像素。这里将DEM与Mini-RF雷达数据配准,插值后的DEM数据分辨率与雷达数据相同。可以发现,这些平坦陨石坑斜坡一般不超过10°,对应的雷达数据如图3(c)所示。由于这些陨石坑比较平坦,并且受到周围小坑的影响,难以辨别。这类退化程度较高的陨石坑表面岩石较少,陨石坑壁斜坡倾斜角度较小,对着陆器的影响较小。
2.3 雷达对粗糙地形识别
一种典型的月表粗糙面是新鲜陨石坑的溅射毯[26]。图5(a)是位于(6.518°N,6.392°E)的新鲜陨石坑的光学图像,太阳光入射角大于80°,图5(b)是太阳入射角小于40°时的光学图像。新鲜陨石坑内部的新鲜物质和岩石的太阳反射率较高,所以图5(b)中陨石坑内亮度更大,图5(c)是图5(a)中红框区域的放大图,可以看到陨石坑溅射毯区域大量的岩石以及一些小坑。图5(d)~(f)分别是雷达回波强度、CPR和极化度m,溅射毯区域雷达回波非常强,CPR较大,而m较小,表明这块区域非常粗糙。由于波长以上尺寸的散射体容易引起多次散射,使得CPR上升,m下降,这两个极化参数可以用于辅助判断月表面的粗糙程度。
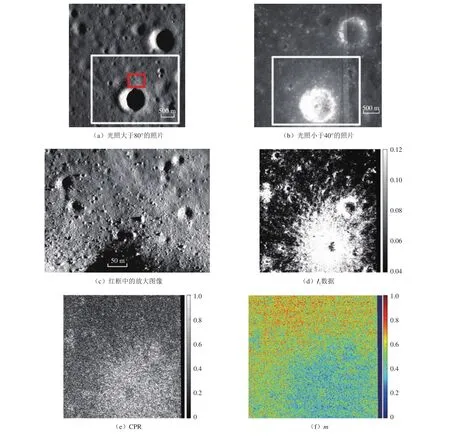
图5 新鲜陨石坑光学图像与雷达数据Fig.5 Optical and radar images of a fresh crater
图5(d)雷达回波图中背向雷达入射方向的陨石坑壁处的回波较弱,图5(e)中CPR在面向雷达的陨石坑壁上较小,而图5(f)中此处的m较大,这些变化是由入射角引起的,在下文中将会讨论。
甚高分辨率雷达图像能够识别更小的目标,例如直径数米至数十米的岩石和陨石坑等,分辨率的提升也会对雷达极化参数造成影响,能够观测到岩石或者小陨石坑局部回波的散射机制。
2.4 平坦区域的雷达图像
图2的白圈内区域比较平坦,其光学图像和雷达数据如图6所示,图6(a)是太阳光入射角大于80°时的光学图像,大照射角度下的阴影作用更容易看出地形的起伏。图6(b)是太阳入射角小于40°时的光学图像,白圈内的光学反照率远低于新鲜陨石坑。图6(c)显示该区域斜坡角度一般小于10°。图6(d)白圈内的雷达回波强度比较弱,其中零星分布的亮点是像素尺寸的小陨石坑,这类像素尺寸的陨石坑在悬停避障时能够调整避开,该区域内不存在直径超过50个像素(14.8 m/像素)的陨石坑,这也能从光学图像和DEM斜坡角度图中得到验证。 图6(e)、(f)中,白圈内的区域的CPR低于右上角陨石坑的CPR,而极化度也高于右上角陨石坑。
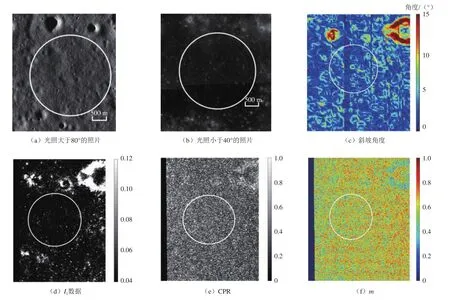
图6 平坦区域光学与雷达数据Fig.6 Optical and radar images of flat region
2.5 入射角对雷达参数的影响
陨石坑壁斜坡改变雷达波的局部入射角[9-10],从而改变回波强度和极化特征,也就是散射机制。这里以卡达努斯E(Cardanus E)陨石坑为例来说明Mini-RF雷达数据随入射角的变化[9-10]。图7是陨石坑内部的散射强度I1数据、CPR、极化度m的平均值随局部入射角变化的关系。数据显示入射角比较小的区域,回波较强,CPR较小,极化度m较大;入射角较大的区域,回波较弱,CPR较大,极化度m较小。这些极化参数随入射角的变化规律都符合粗糙面散射的物理解释。

图7 陨石坑内Mini-RF数据均值对比局部入射角Fig.7 Average value of Mini-RF data against local angles of incidence in the crater
不同的雷达观测频率也会导致观测结果的差异,波长及波长以上尺寸的目标会引起多次散射,不同尺寸月表散射体的分布差异会对不同频段的雷达极化参数产生影响,这可能是Mini-RF与“月船2号”不同频段观测差异的原因[27]。
2.6 “嫦娥四号”着陆点雷达图像
图8是“嫦娥四号”着陆点的光学图像和雷达图像,“嫦娥四号”着陆点位于(45.45°S,177.60°E),着陆期间通过悬停避障技术躲避了直径25 m的陨石坑[17],中间的白框内是“嫦娥四号”的着陆点,着陆点左右两侧白框内的陨石坑都可以在雷达图像中辨别,其中右侧白框内的陨石坑直径接近100 m,在雷达图像中较为明显,左侧白框中的小陨石坑直径不到50 m,在雷达图像中呈现几个像素的亮点。由于Mini-RF雷达图像分辨率较低,着陆点附近几个相对较平坦的小陨石坑在雷达图像中难以识别,这样的陨石坑有望在更高分辨率的全极化合成孔径雷达图像中得以识别。
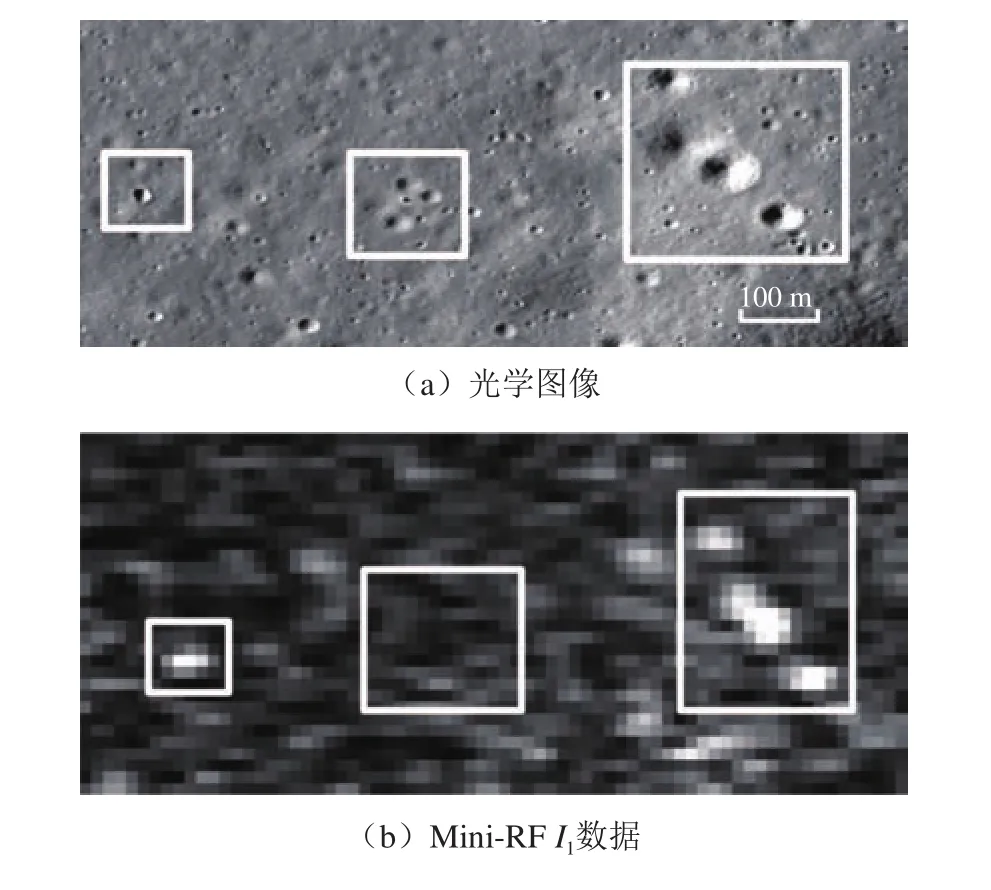
图8 “嫦娥四号”着陆点的光学图像和雷达图像Fig.8 Optical and radar images of the landing site of Chang’E-4
3 雷达图像自动识别
深度学习人工神经网络在雷达目标识别中发挥着越来越重要的作用[28],借鉴于目前主流的深度学习主干网络HRNet来进行特征提取[29],进而实现对图2中的雷达图像陨石坑区域的语义分割。首先用人为像素级标注的4张其它区域的雷达图像进行网络训练,其中训练集中图像大小与图2近似,但所处区域不同。网络泛化测试的分割结果如图9所示,结果表明图2中约75%以上的大坑可以识别出来。
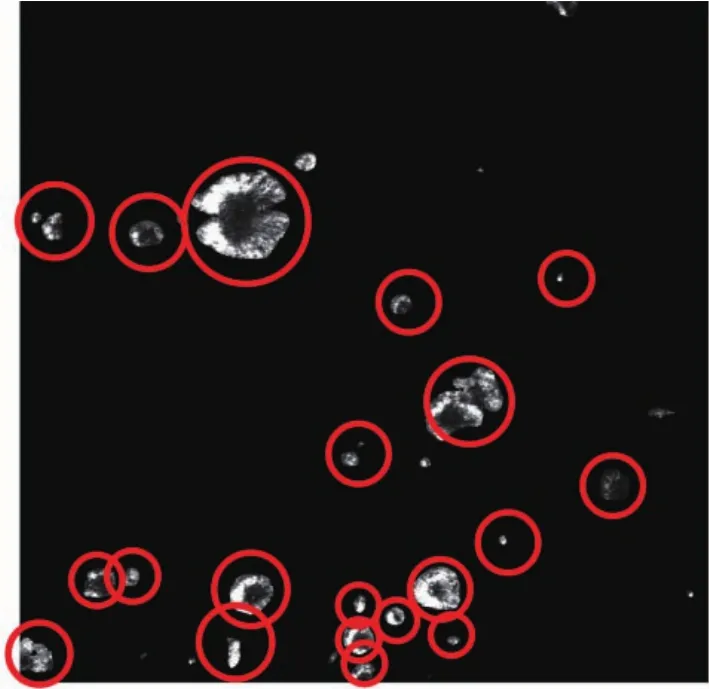
图9 SAR图像陨石坑分割Fig.9 Craters segmentations with SAR image
人工智能方法的目标识别准确率很大程度上取决于数据集,即人为标注的准确性。由于人为像素级标注中存在一定的误差,使得网络测试结果中带有一定的主观性。从识别的速度、精度以及泛化能力来看,人工智能方法相比传统的特征提取方法在大范围区域的目标识别和统计中具有明显的优势。
4 PSR着陆点选取建议
月球PSR一般位于极区的陨石坑内部,陨石坑内部的地形比坑外地形更加粗糙,图10给出了位于月球南极的Shoemaker陨石坑(88.10°S,41.90°E)内部的雷达回波图像、CPR图像以及DEM斜坡图像,斜坡图像空间分辨率为20 m/像素,斜坡图中显示陨石坑底较为平坦,斜坡角度一般在10°以内,但是从雷达回波图10(a)中可以发现,坑底密集分布有不同尺寸的小陨石坑,许多小陨石坑在斜坡图中无法识别,难以找到适合着陆的大块平坦区域,适合着陆的平坦区域边长一般不超过1 km。
图10中红框1和2位于(88.27°S,35.00°E)与(88.22°S,43.30°E)附近,相比于陨石坑内部的其它区域,红框内的雷达回波较弱,CPR较低,m较高,斜坡角度小于10°,其雷达回波放大情况如图11所示,没有明显的大陨石坑,今后获取了高分辨率雷达数据后,可以进一步分析这两块区域是否适合着陆。

图10 Shoemaker陨石坑内部雷达数据与斜坡数据Fig.10 Radar data and slopes inside the crater Shoemaker
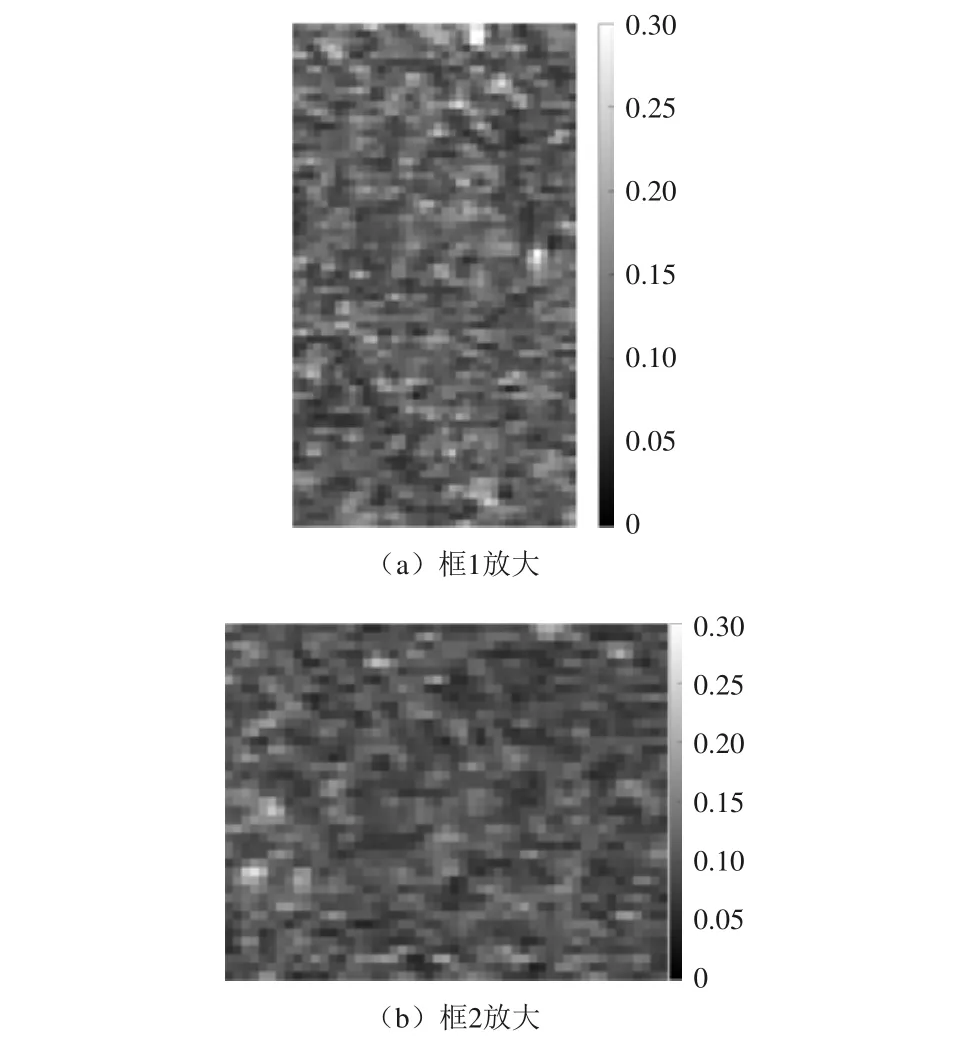
图11 Shoemaker陨石坑内部区域I1图像放大Fig.11 Enlargement of I 1 image inside the crater Shoemaker
值得注意的是,Shoemaker陨石坑的倾斜坑壁跨度超过10 km,若要从坑外光照充足的平坦着陆区到达陨石坑内部平坦区域,飞跃器需要飞行的距离更长,还需要考虑下降过程中的距离,飞跃器飞行距离是限制采样点选择的一个重要因素。
Shackleton陨石坑位于月球南极(89.67°S,130.00°E),内部是否存在水冰一直具有较大争议[12,30],其雷达图像和DEM斜坡角度如图12所示,图12(a)红圈内区域是陨石坑的坑底,在成像过程中,陨石坑底距离雷达较远,所以在雷达图像中坑底向远端偏移。陨石坑的倾斜坑壁跨度达到7 km,坑壁非常陡峭,斜坡角度接近30°。
图12中红色方框内部的区域雷达回波较弱,斜坡角度小于10°,未来可以进一步分析是否适合着陆采样。
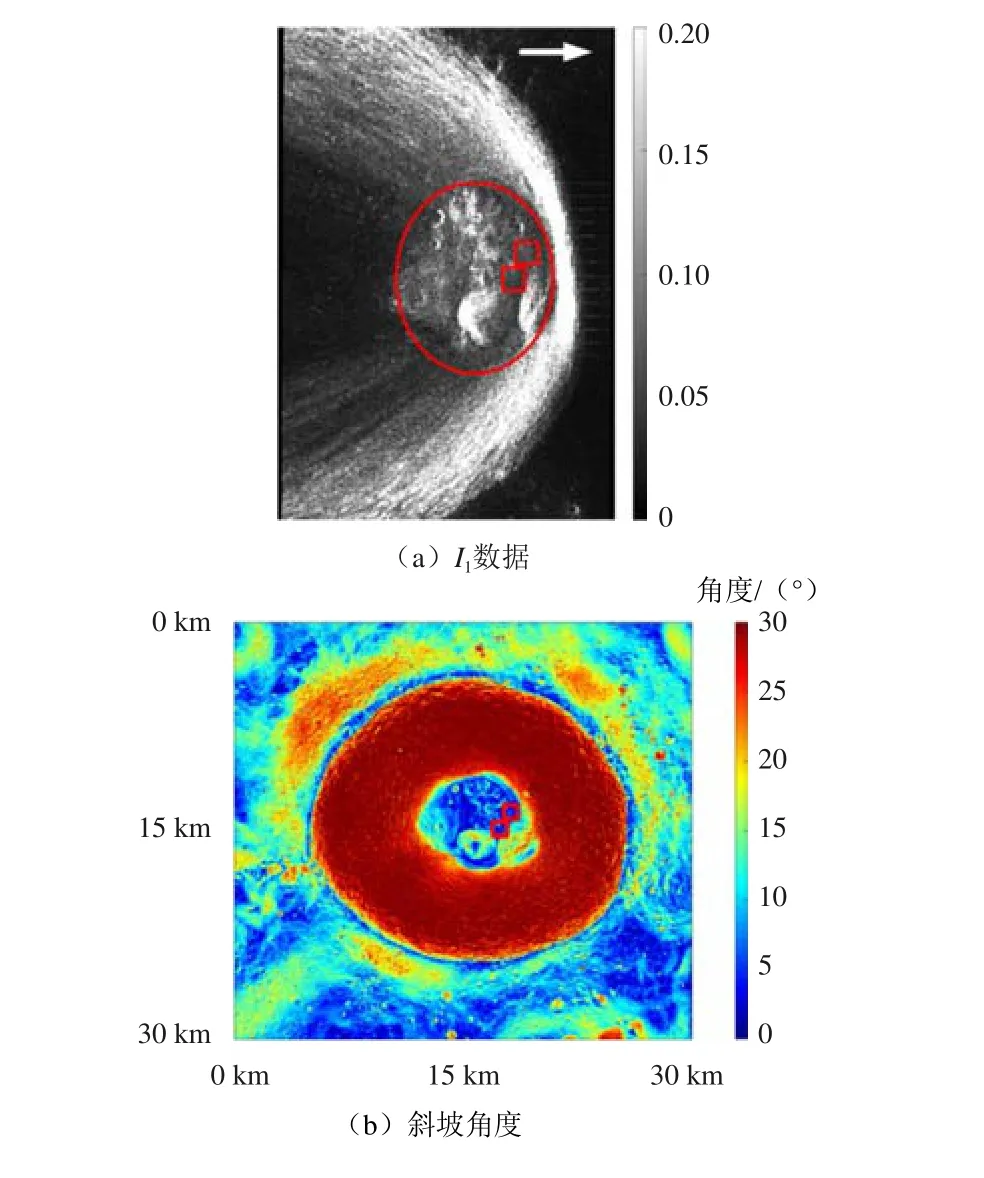
图12 Shackleton陨石坑Fig.12 Crater Shackleton
5 结 论
为了分析Pol-SAR对PSR着陆点与采样点的地形信息获取能力,本文从太阳光直射区域的Mini-RF雷达图像找出直径超过50个像素的陨石坑,对比光学图像发现,除了个别斜坡小于10°的平坦陨石坑,Mini-RF雷达图像基本能够识别图中所有的大陨石坑。直径50个像素的陨石坑在甚高分辨率SAR图像中直径约为25 m。这样的陨石坑可由飞跃器自行躲避。雷达图像中也能够较容易地识别出直径在10~50个像素之间的陨石坑,而更小的陨石坑在雷达图像中往往就是一两个亮点,其回波强度明显大于周围区域。在用Pol-SAR数据选取PSR内的平坦区域作为着陆点时,首先避开直径大于50个像素的大陨石坑,其次,挑选亮点相对较少的雷达暗区,这些区域小坑的覆盖率比较低,容易找到着陆地点。
雷达图像还能够识别一些在光学图像和DEM图像中不容易发现的粗糙表面,例如新鲜陨石坑的溅射毯区域,这些区域覆盖有很多岩石或者新鲜月壤的溅射物,粗糙月表面的一个显著特征就是强雷达回波,其极化参数CPR较大,极化度m较低。
陨石坑壁斜坡改变雷达局部入射角,从而改变回波强度和极化特征,这与平坦区域低回波的极化特征不同。
HRNet等神经网络方法也可以对雷达图像进行目标识别分割,分割结果受标签影响,存在一定的主观性。神经网络方法在大区域图像的目标识别和分割中将具有明显优势。
在选取平坦区域的过程中,主要依靠雷达回波强度等4个Stokes参数,极化参数CPR和极化度m起辅助作用,研究给出了月球南极Shoemaker陨石坑和Shackleton陨石坑内部PSR的雷达图像和斜坡图像,选取了一些较为平坦的区域,Mini-RF入射角较大,导致信噪比降低,极化参数容易受到影响。在“嫦娥七号”甚高分辨率条件下,对月表地形的识别能力将有很大的提高,结合全极化信息,可以对这些平坦区域进行进一步的判断。
本文归纳了雷达图像选取平坦区域时极化参数与雷达回波强度的作用,并给出了光学图像、数字高程模型以及雷达图像的对比分析,以供工程应用参考。
猜你喜欢
湖州师范学院学报(2023年8期)2023-10-17 12:42:36
英语世界(2022年5期)2022-05-18 12:14:16
空间科学学报(2021年2期)2021-07-21 08:43:38
文萃报·周五版(2020年15期)2020-04-22 20:18:44
阅读与作文(小学高年级版)(2020年3期)2020-03-02 14:51:23
弹箭与制导学报(2018年3期)2018-08-28 03:06:42
石油地球物理勘探(2017年2期)2017-11-23 06:01:17
深空探测学报(2016年4期)2017-01-18 06:15:03
深空探测学报(2015年3期)2015-12-07 11:14:56
航天器工程(2014年4期)2014-03-11 16:35:37
