
基于STM32的船载卫星伺服控制系统
2022-04-12 01:42:28李朵朵符秀辉王姜婷
沈阳化工大学学报 2022年6期
李朵朵, 符秀辉, 王姜婷
(1.沈阳化工大学 信息工程学院, 辽宁 沈阳 110142; 2.辽宁大学 物理学院, 辽宁 沈阳 110036)
目前,国内应用最广泛的跟踪系统是程序对星加自动跟踪的北斗船载卫星伺服控制跟踪系统,区别于以往纯粹的手动跟踪,该系统利用北斗模块获取纬度信息,采用程序跟踪方式完成对星[1].梁永湖等[2]研究的基于STM32F103V8T6的船用卫星电视天线控制系统虽然能够满足通信要求,但其体积比较大,对船只要求比较高.凌鸣等[3]研究的基于STM32F4的船载动中通天线伺服控制系统虽然是一个完整的伺服控制系统,但是它的实时性不高.为了满足船载卫星要求,笔者设计了一种新的伺服控制系统,该系统具有实际的应用价值.
1 系统整体设计
伺服控制系统主要由主控板、电机驱动板、编码器和两路瑞士maxon电机组成.控制器采用STM32F103单片机作为主控芯片,主控板负责接收和处理上位机接收的卫星信号,进而控制电机的运行.根据上位机接收的电机运行角度,STM32微处理器把运动角度信息发送给电机驱动板.电机驱动板输出两个伺服电机的脉冲序列、方向以及驱动板所需要的使能信号,使电机运动到指定位置.编码器通过串口将监测的电机运动角度实时反馈给上位机控制器,形成闭环反馈方式,从而保证电机运动的准确性.
1.1 天线结构
船载卫星接收天线采用一种方位轴和俯仰轴控制的机械结构方式,卫星通信的天线安装在俯仰平台上,通过方向电机和俯仰电机调整船载天线的姿态.由天线板、俯仰被动齿轮、天线顶部压板、天线平板转接件组成天线系统.在底盘的齿轮上装有滑环,可以360°连续旋转,不用限制位置,伺服系统所采用俯仰轴的调节范围为 0°~60°.另外,此系统还采用霍尔传感器进行限位.天线安装系统如图1所示.用8个M4×8的内六角圆柱头螺钉将天线顶部压板、天线和左右两侧的天线平板转接件及俯仰被动齿轮连接在一起,螺钉先不拧紧,将俯仰被动齿轮和天线平板转接件向左右两侧靠近(使天线平板转接件及俯仰被动齿轮间距最大),然后将8个M4×8的内六角圆柱头螺钉拧紧固定.

图1 天线板安装接口Fig.1 Antenna plate installation interface
最后用8个M3×8的螺钉将天线顶部压板及天线背部连接件连接在一起,调整好位置并固定.伺服系统机械结构如图2所示.该系统的外形尺寸比其他船载卫星伺服控制系统外形尺寸小.各个卫星参数对比如表1所示.

图2 伺服系统机械结构Fig.2 Mechanical structure of servo system

表1 各个卫星参数对比Table 1 Comparison of satellite parameters
1.2 系统功能
伺服控制系统的控制核心为STM32单片机,其主要功能模块包括霍尔传感器、伺服电机.通过控制核心,根据所得到的步进电机的方位角数据和俯仰角数据共同驱动船载卫星伺服控制系统运动,完成卫星的扫描、实时跟踪[4].船载卫星的伺服控制系统功能组成如图3所示.

图3 伺服系统结构Fig.3 Structure diagram of servo system
1.3 控制策略
船载卫星天线使用过程中,天线伺服控制系统采取360°连续旋转进行寻星,上位机根据连续卫星连续旋转得到确定的目标卫星参数后,接收北斗卫星信息,计算出船载卫星天线的俯仰角,把数据传给控制器,驱动俯仰电机使俯仰轴到达俯仰角度,驱动方位电机以达到方位角度.实时地根据接收数据控制方位电机和俯仰电机的转动,达到所需角度要求.为减少在通信过程中的搜星时间,伺服控制系统采用就近原则;在0°~360°的范围内,伺服系统走小角度来达到目标要求,若没有收到反馈的角度,船载伺服控制系统进入连续旋转状态[5].
2 硬件设计
2.1 STM32主控核心及主控电路设计
船载卫星天线的控制系统具有较多的电机和传感器,设有很多的外设接口.STM32F103系列作为主控核心,从成本和难易程度来估计,它都是最佳的单片机选择[2].STM32F103单片机接收上位机数据,根据得到的电机运行角度驱动各个伺服电机对船载卫星天线的姿势进行调整.STM32具有一流的外设、低功耗、内嵌复位电路、内部RC振荡器,最多高达112个快速I/O端口,多达13个通信接口.STM32可以处理43个可屏蔽中断通道,提供16个中断优先级允许中断提前处理,对后到的更高优先级的中断进行处理不需要指令干预.
回转滑环采用森瑞普滑环(HF-0218-64-12S),滑环具有2路高频信号, 2路传感器信号,每路可通过5 A电流.
霍尔开关选用茶花电气的JK8002C M8,安装螺距为M8×1,俯仰轴及回转轴各配一个.霍尔开关参数如图4所示.

图4 霍尔开关参数Fig.4 Hall switch parameters
2.2 电机驱动程序设计
利用PWM脉冲序列控制步进电机的运动,每次接收到一个脉冲,步进电机运动一个步距角.俯仰转盘与电机的齿轮比是1∶4,方向转盘与电机的齿轮比是1∶8.STM32单片机通过改变脉冲频率控制伺服电机的运动速度,PWM脉冲个数控制伺服电机运动的距离.STM32单片机的IO3控制的是PWM,IO2控制的是方向,方向与高低电平有关,高电平是正方向,低电平是反方向.驱动器有3个模式,在步进模式中可调速度(速度范围有0.5、1、1.5、2 m/min).STM32控制板产生两路脉冲:一路的IO是I13,另一路是I15;I13控制转盘,I15控制俯仰,俯仰的角度是0°~60°.控制两个电机过程中,板子与板子之间进行RS232串口通信,控制板发出的指令是6个字节.其中:第1个字节是0,是启动电机1的标识符;第2个字节是电机转动的时间,数值增加1是循环1 s;第3个字节是电机停止的时间,数值增加1是循环1 s;第4个字节是255,是启动电机2的标识符,如果电机开始转动,这个字节是255;第5个字节是电机转动的时间,数值增加1是循环1 s;第6个字节是电机停止的时间,数值增加1是循环1 s.
3 软件设计
船载卫星天线的控制系统软件设计主要是先使系统进行初始化、上电寻零和采集所需要的数据值.系统初始化主要完成单片机内部的系统配置,包含IO口的初始化配置、定时器的中断、串口的中断以及接收上位机采集到目标卫星的各个数据参数、俯仰轴和方向轴的初始化等.伺服系统上电后两路电机开始旋转找到零点状态,每次回零的状态位置都是相同的,同时实时采集上位机传输的数据调节方向轴和俯仰轴的姿态.当姿态满足位置时达到跟踪状态;当姿态不满足时,会根据上位机传输的数据再次进行调整,直到满足要求.软件程序流程如图5所示.

图5 软件程序流程Fig.5 Software program flow
4 系统测试
天线放在试验台上进行测试,控制系统能够根据所采集到的数据角度旋转,而且能满足要求.测得的数据如表2所示.
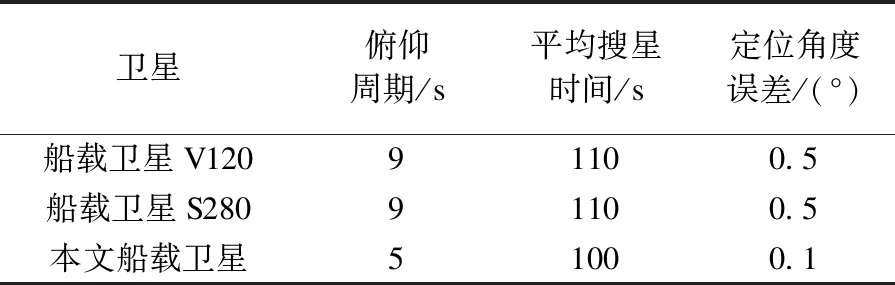
表2 各个卫星数据Table 2 Satellite data
本文船载卫星在测试过程中俯仰角度是0°~60°,方向角度是0°~360°,经过多次实验得出平均搜星时间.根据表2对比结果可以看出:本文船载卫星平均搜星时间较短,船载卫星接收到数据以后能够及时作出反应;根据实验室的惯导组合定位系统,能够准确测出定位角度误差.天线测试平台如图6所示.

图6 天线测试平台Fig.6 Antenna test platform
5 结束语
实验结果表明:基于STM32单片机开发的船载卫星伺服控制系统体积小、实时性好,伺服控制系统与上位机能够满足通信要求,能够传输和接收数据信号,能够保障海上船只的通信要求.在现有的船载卫星伺服控制系统中,本文的船载卫星伺服控制系统结构安全性好、设计简单有效、操作方便,在工业上的应用具有良好的商业价值.
猜你喜欢
北京航空航天大学学报(2022年6期)2022-07-02 01:59:46
微特电机(2020年11期)2020-12-30 19:42:32
科技传播(2019年22期)2020-01-14 03:06:28
测控技术(2018年12期)2018-11-25 09:37:44
电子制作(2018年17期)2018-09-28 01:57:00
通信电源技术(2018年3期)2018-06-26 06:33:36
北京航空航天大学学报(2017年5期)2017-11-23 05:54:08
工业设计(2016年6期)2016-04-17 06:42:53
北京航空航天大学学报(2016年4期)2016-02-27 06:32:11
卫星与网络(2016年12期)2016-02-05 09:23:28
