
一种穿戴式康复外骨骼机械手的设计和分析
2022-04-08 09:11马文章肖飞云
合肥工业大学学报(自然科学版) 2022年3期
马文章,肖飞云,王 勇
(合肥工业大学 机械工程学院,安徽 合肥 230009)
卫生部心血管病防治研究中心资料显示,截至2017年我国脑卒中患者超过1 762.77万,40岁以上的患病人数已达1 242万。在脑卒中患者中大约有80%的人患有手部运动功能性障碍[1],导致他们无法完成日常生活活动,给家庭带来生活负担。然而,大量的研究表明,基于大脑的可塑性理论,连续被动康复训练运动(continuous passive motion,CPM)疗法可以有效地阻止肌肉萎缩,促进神经系统运动功能重塑,从而防止肌腱黏连以及关节僵直,促进运动部位血液循环,改善患者关节的康复效果[2],以达到康复患肢的目的。通过佩戴机械手,患者可以自主进行高效的被动康复训练。目前,康复机械手的研究已经成为世界康复工程以及机器人学科的一个重点研究方向[3]。综合国内外的手部康复装置,按结构可分为指尖牵引式机械手和外骨骼式机械手两类[4]。牵引式机械手是把手掌固定在平台上,动力直接驱动手指指尖,例如杭州正大医疗器械生产的手部关节持续被动活动仪[5],该训练仪使用单电机驱动5个手指指尖,结构简单,能够实现五指协调运动,但是无法对单指单独训练,不利于各掌指关节之间的运动功能康复;外骨骼式机械手则把手指配戴在机构上,让机构带动手指运动。
外骨骼机械手又可以分为柔性外骨骼机械手[6-7]和刚性外骨骼机械手两类。在柔性外骨骼机械手中,以套索结构机械手为代表,其结构尺寸较小,外形能够很好地贴合手部;但是套索结构只能够提供拉力,每个关节的驱动需要2个电机,整体布线比较复杂,整体质量较重,因而制作成本较高不利于推广。以连杆和齿轮机构为代表的刚性外骨骼机械手,具有良好的反向驱动性与低柔度、低惯性、较好的增力效果[8]。但目前研究的机械手结构尺寸相对较大、质量较重,在实际运用中仍然有难度。文献[9]和文献[10]研制了单指具有三自由度训练五指的机械手,该机械手每个手指设置3个电机,可以完成对手指各关节的驱动,但是整个机构结构庞大、成本较高;文献[11]和文献[12]研制了单指具有两自由度的十二杆机构机械手,可以实现指尖轨迹在一定范围内运动,但是结构仍较复杂且占用空间较大,不利于穿戴;文献[13]设计了单自由度七杆手指康复外骨骼机械手,可以实现对单指2个手指关节的驱动,但手指关节与机构不能较好地匹配;文献[14]设计的齿轮齿条式手指康复机械手实现了手指关节中心与机构运动中心匹配,但因其机构较高的布置导致穿戴稳定性较差,在康复训练的时候机构容易发生侧翻,具有潜在的安全隐患。
另外,在人手康复的过程中,手部的姿态(腕部的弯曲角度和桡尺关节的姿态角度)对患者手部的舒适度以及康复的效果有很大影响[15]。在上述设计中,只对机械手手指运动角度进行了设计,没有对腕关节和桡尺关节角度的考虑。
针对目前手部康复装置存在的不足,本文采用双平行四边形机构和关节对中结构相结合的方式设计一款结构简单、质量轻便、能与手指相容且稳定性好的外骨骼机械手,同时增加腕关节和桡尺关节运动的机构;设计可以根据人手的具体尺寸参数数字化建模来适当缩放机构以适应人手,采用3D打印的方式加工制作样机。最后,对机构进行运动学分析与试验验证。
1 康复外骨骼机械手的机构设计
1.1 人手指的生物学分析
对人手指的研究是设计机构的一部分。除大拇指外的其余四指相对于手掌的运动分别由掌指关节(metacarpophalangeal joint,MCP Joint)、远端指间关节(distal inter phalangeal joint,DIP Joint)以及近端指间关节(proximal inter phalangeal joint,PIP Joint)决定,其中每个手指的自由度为4,掌指关节MCP Joint自由度为2,远端指间关节DIP Joint以及近端指间关节PIP Joint自由度均为1。大拇指的运动则由腕掌关节(carpometacarpal joint,CM Joint)、掌指关节(metacarpophalangeal joint,MP Joint)以及指间关节(interphalangeal joint,IP Joint)共同决定,其中大拇指的自由度为4,腕掌关节CM Joint自由度为2,掌指关节MP Joint以及指间关节IP Joint自由度均为1。人手结构如图1所示。

图1 人手结构模型
除大拇指外的四指各3个关节的运动处于同一平面;各关节的弯曲/伸展、掌指关节MCP Joint的内收/外展运动、大拇指的三关节弯曲/伸展以及腕掌关节CM Joint的内收/外展运动都有一定的范围。正常成人手指关节运动范围[16]见表1所列。
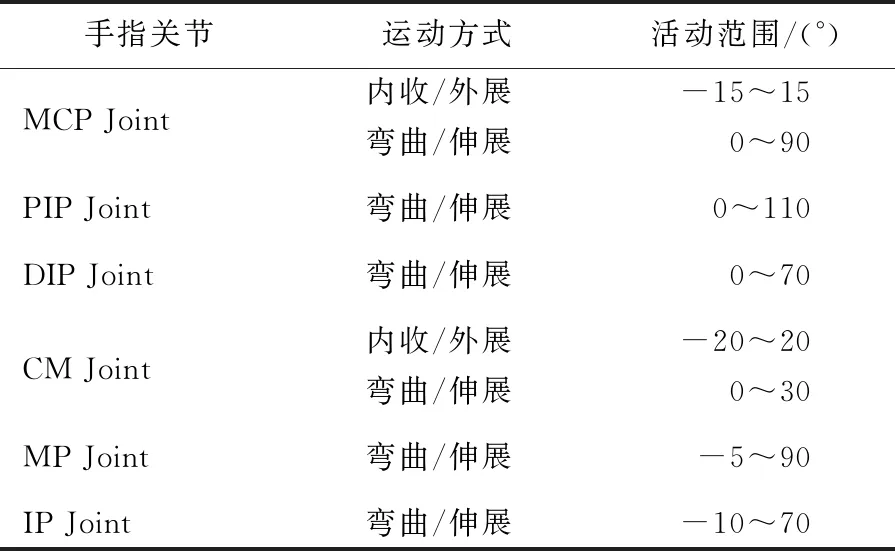
表1 正常成人手指关节活动范围
1.2 机械手的结构设计
人手有多个冗余的自由度,为保证必要的自由度以使外骨骼机械手轻便,采用3D打印技术制作塑料外骨骼。由于手指PIP Joint与DIP Joint在运动过程中有耦合[17],在康复训练过程中对手指单独的康复训练能带动内收外展的肌肉群[18],对手指PIP Joint进行设计即可。针对患者在康复的早期以及中期上肢不能够自主伸展,特别是腕部以及桡尺关节不能够自主运动,设计了腕部以及桡尺关节运动机构。
整个机械手主要包括5个手指训练机构、腕部弯曲/伸展机构、桡尺关节翻转机构以及底座。康复外骨骼机械手样机如图2所示,主要运动参数见表2所列。
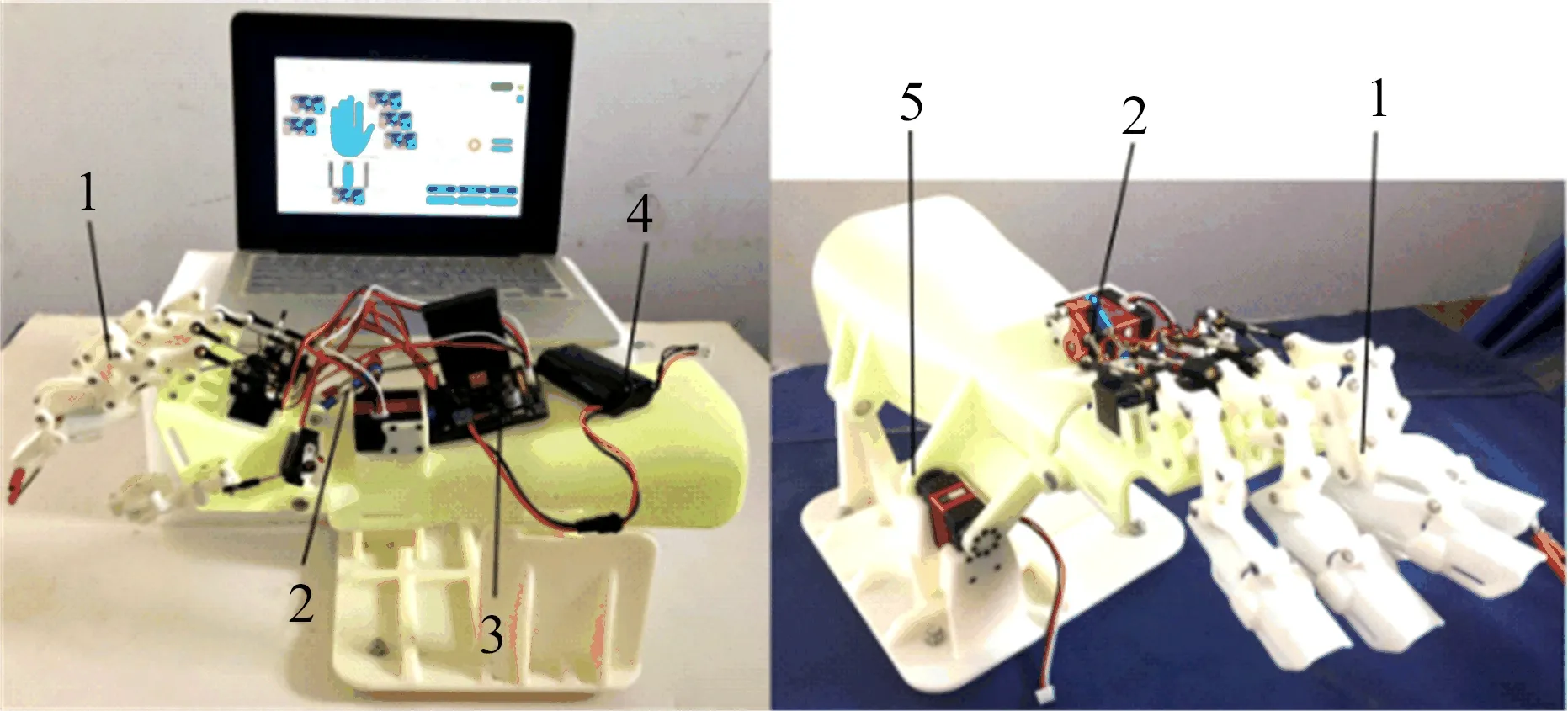
1.手指训练机构 2.腕部弯曲/伸展机构 3.舵机控制开发板 4.直流电源 5.桡尺关节翻转机构以及底座
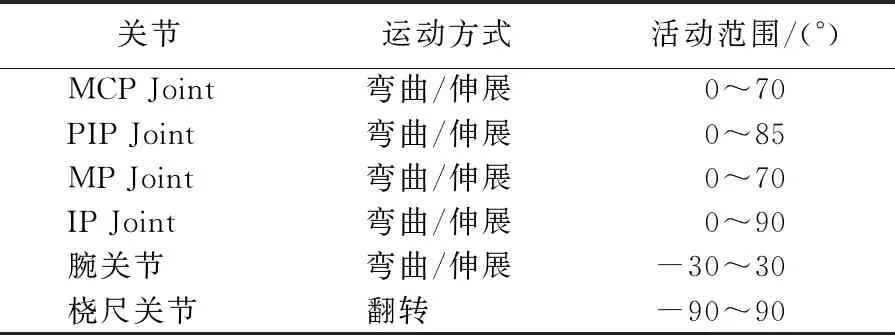
表2 机械手主要运动参数
1.2.1 康复机械手手指训练机构
人手的5个手指结构类似,在做弯曲伸展运动的时候可认为3个关节在同一平面内,鉴于四指PIP Joint与DIP Joint的角度运动关系有一定的耦合,本设计仅对MCP Joint与PIP Joint驱动,大拇指仅对MP Joint与IP Joint驱动。
根据人手抓握特性,将外骨骼机构放置在操作者手背更为合理;为减轻训练机构的重量,采用轻便、体积小、扭矩大的舵机作为驱动,采用结构紧凑、传动准确的空间四连杆结构(RSSR)传递动力。手指训练机构如图3所示,其中连杆机构ABCD即RSSR四连杆结构。
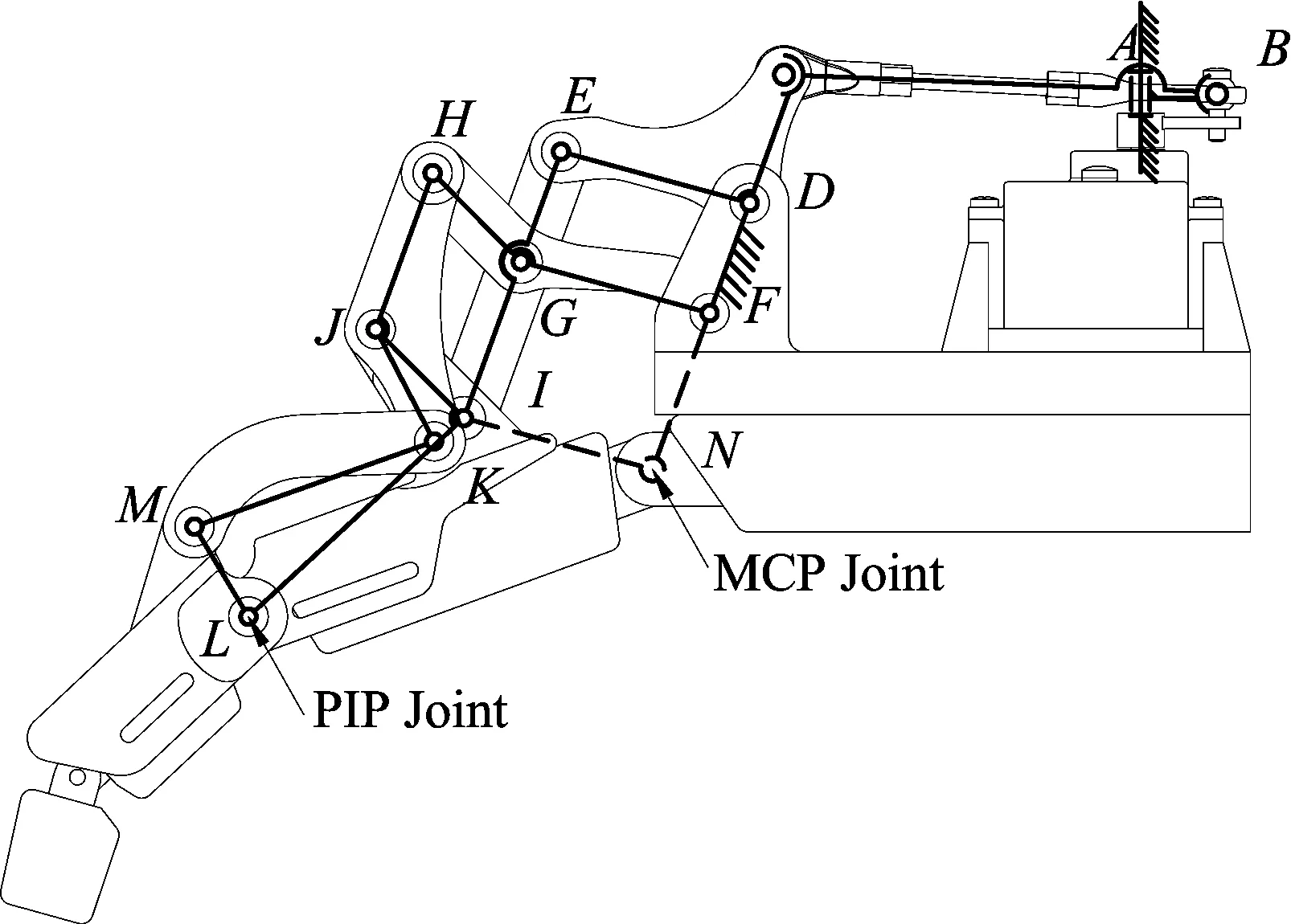
图3 手指训练机构
人手的四指MCP Joint之间有肌腱相连,为避免五指机构的干涉,同时实现MCP Joint转动中心与机构运动中心重合,避免造成对人手软组织的二次损伤,采用图3所示的双平行四边形远程投影中心机构。在平行四边形连杆EDFG中ED=GF,EG=DF,设置杆长GI=FN,此时,仅对机构进行分析,近节指骨挡板上的铰接点I围绕着N点旋转。平行四边形连杆HJIL中HJ=GI,HG=JI,此机构驱动近节指骨挡板围绕着N点旋转,连接近节指骨的构件围绕虚拟中心MCP Joint旋转。
患者手指长期处于蜷缩状态,在手指康复训练过程中,各手指之间需要有适当的角度分指。本设计采用关节对中的方式驱动PIP Joint;在机构上采用嫁接四连杆机构JILMK使PIP Joint与铰接点L重合,保证指关节与机构运动相容;如图3所示,手指接触的挡板覆盖于手指的背部和两侧且设置了绑带槽,穿戴时机械结构与人手紧密贴合,穿戴更加稳定,保证了有一定的分指角度;驱动两关节的结构相结合,减少了驱动的数量,简化了结构,减轻了总体质量,同时能节省手指背部的空间方便手指的运动;设计对各个零件的尺寸参数化,并采用3D打印的方式制作样机。对于不同手部尺寸的患者可以仅测量5个近节指骨的长度,即可生成所有零件的尺寸。
1.2.2 腕部弯曲/伸展机构
腕部弯曲/伸展机构如图4所示。设计的腕部弯曲/伸展机构已调整训练时的舒适角度,如图4中舵机驱动的双摆杆机构;驱动舵机的摆臂完成对手腕的调整;采用铰接中心重合的外骨骼结构与腕关节相容。在康复训练后期,此机构也可用于腕部康复训练。
1.2.3 桡尺关节翻转机构以及底座
前臂翻转机构以及底座如图5所示。设计了图5中的桡尺关节翻转机构调整桡尺关节角度方便患者穿戴,整个机构采用舵机直接驱动。为增强机构的稳定性,在舵机同轴位置设置了轴承和支架,在另一侧设置了挡板,此机构也可用于桡尺关节的康复训练。

1.前臂固定外壳 2.轴承及支架 3.挡板 4.底座 5.舵机图5 前臂翻转机构以及底座
2 康复机械手运动学分析
康复机械手运动学分析主要研究机械手MCP Joint、PIP Joint关节的转动角度、转动角速度、关节点在运动平面的轨迹。同时,在本次分析中规定机械手训练机构绕z轴逆时针转动为弯曲动作,绕z轴顺时针转动为伸展动作。
在分析手指相对于掌指关节坐标系的位姿关系时,掌指关节中心N点相对于坐标系原点F固定,两指节在动件CD和机构的作用下运动。5个手指训练机构原理相同,本文只分析食指训练机构。
2.1 康复机械手运动学分析
康复机械手的手指训练机构分为传动机构和执行机构,其中传动机构为空间RSSR四连杆机构。空间坐标系如图6所示,各参数含义见表3所列。其中:o1x1y1z1为主动件AB坐标系;o3x3y3z3为从动件CD坐标系;o4x4y4z4为机架AD的坐标系;杆件方向指与杆件所在的轴比较,正方向一致时为正。
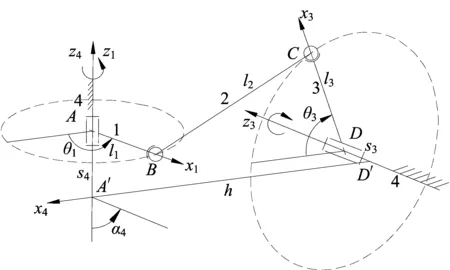
图6 空间RSSR四连杆机构
表3 RSSR四连杆机构各参数含义
为便于分析,取机架的z4轴与原动件的z1轴重合;原动件AB与从动件DC分别为x1以及x3的轴;选取z1与z3的公垂线为x4轴的方向。
对B点、C点进行分析。对于B点位置,在o1x1y1z1坐标系下为(l1,0,0),坐标系o1x1y1z1相对于o4x4y4z4的坐标变换为o1x1y1z1先与o4x4y4z4重合再沿着z4轴平移s4,然后绕z4轴旋转θ1,则有:
(1)
同理对C点的坐标变化进行分析,可得C点相对于坐标系o4x4y4z4关于θ3的坐标为:
(2)
由于在空间RSSR四连杆机构中,杆件BC的长度l2为定值,其约束方程为:

(3)
将所得的B点(1)式与C点(2)式的坐标带入约束方程(3),化简得到其关于θ3的标准三角方程形式:
Acosθ3+Bsinθ3+C=0
(4)
其中
B=-h/l1-cosθ1;
求解方程(4)可得θ3为:
(5)
(5)式θ3有2个值,根据图6所在的位置以及四连杆运动的连续性可以判定此时应取正值。
手指执行机构的运动简图如图7所示。
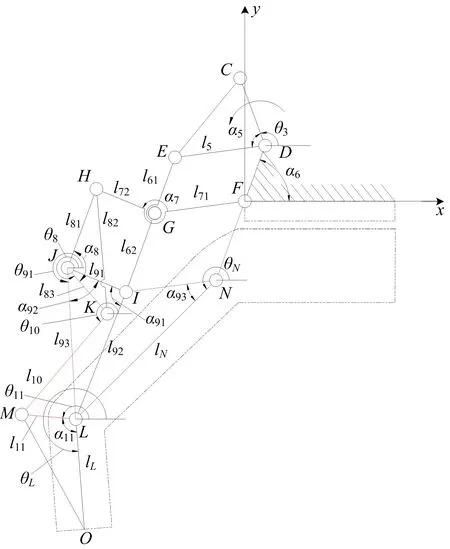
图7 手指训练执行机构
图7中整个机构为八杆机构:驱动MCP Joint的为双平行四边形机构,驱动PIP Joint的为平面四杆机构;以F点为坐标原点,规定以绕z轴的逆时针的转动方向为正方向。图7中各参数含义见表4所列。

表4 手指训练执行机构各参数含义
在平行四边形机构DEGF中,l5=l71,l61=DF;平行四边形机构GHJI中,l72=l91,l62=l81;做出辅助线FN与IN,在双平行四边形机构中,N点为I点远程虚拟运动中心,投影在MCP Joint上,此时,刚性桁架JIL围绕着N点转动。
由平行四边形的性质可得:
θN=θ3+α5+α93
(6)
根据双平行四边行的杆长特性,此机构中,平行于机架DF的所有杆件角度不变化;其余杆件的夹角变化相同,故有:
θ8=α6-α8
(7)
θ91=θ3+α5-α7-α92
(8)


(9)
由欧拉公式展开可得:
(10)
联立(7)式~(9)式,消去θ10可得:
Acosθ11+Bsinθ11+C=0
(11)
其中
A=l93cosθ91-l83cosθ8;
B=l93sinθ91-l83sinθ8;
求解(11)式可得:
(12)
代入(10)式可得:
(13)
由图7中的关系可得:
θL=θ11+α11
(14)
由(14)式和(12)式可知,PIP Joint的转动角是θL关于θ3的函数,图7中近节指骨与中节指骨长度分别为lN、lL,可得两指间关节所对应的两点L与O的关系式如下:
(15)
L、O点的位置表达式为:
(16)
L、O点的速度表达式为:
(17)

由(6)式~(8)式、(12)式、(14)式可知,当杆件长度和夹角一定时,手指关节的转角均为输入角θ3的函数,表明外骨骼机械手能带动手指两关节相互协调运动。
通过以上运动学分析,从理论上证明了机械手手指训练机构使用单个输入能够实现2个关节的协调运动,证实了简化关节自由度的可行性,同时为运动角度的控制奠定了理论基础。
2.2 康复机械手的运动学仿真
通过对手指正常弯曲伸展过程的分析可知,近端指间关节PIP Joint与远端指间关节DIP Joint有一定的耦合关系[17],其关系约为:
θPIP=0.5θDIP
(18)
利用SolidWorks建立外骨骼机械手的三维模型,把模型导入ADAMS中,按照材料实际的属性设置相应的质量参数以及接触参数,并添加相应的约束和驱动。设定1个周期的仿真时间为4 s,舵机的驱动函数为阶跃函数,即
(19)
食指关节以及指尖点在平面的运动轨迹如图8所示;食指3个关节的角度变化曲线如图9所示;食指关节的弯曲角速度变化曲线如图10所示。

图8 食指关节以及指尖点在平面的运动轨迹
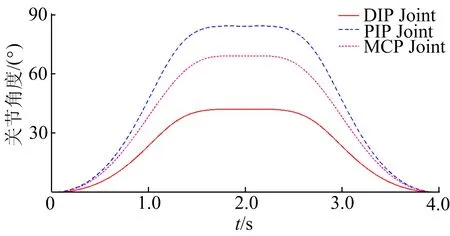
图9 食指各关节的角度变化曲线
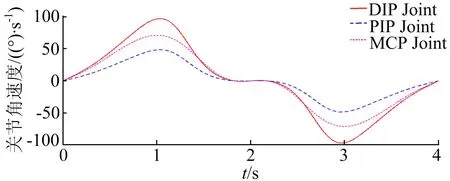
图10 食指两关节的弯曲角速度变化曲线
通过对手指一个运动周期的分析可知,手指3个关节的角度变化为:ΔθMCP=70°,ΔθPIP=85°,ΔθDIP=42.5°。这与设计的最大康复角度一致。
从图9、图10可以看出,3个关节的角度和角速度均在允许的一定范围内变化。
3 样机试验与分析
本文对康复机械手的穿戴适应性和机械手对手指的实际运动效果进行验证。首先,本文对多名手型号相仿的男性志愿者的手部尺寸进行测量,并对机械手机构参数化建模;然后,利用3D打印技术制作出零件并装配样机,在机械结构与人体接触的地方设置棉垫和弹性绑带,搭建出实验平台。
(1) 对机械手进行穿戴适应性和五指被动训练的验证。调整腕部和桡尺关节的角度,五指分别穿戴在指骨挡板上。机械手佩戴调整过程如图11所示。

图11 佩戴调整过程
通过对志愿者佩戴和调整外骨骼机械手时的反应和观察,志愿者手部均能较好地贴合在机械手上,手指关节运动中心和机构投影中心能够同轴,训练过程中手指与机构未发生侧翻和卡顿。
(2) 对手指2个关节的转动角和转动角速度进行测量,验证康复机械手对手指的实际运动效果。试验采用弯曲角度传感器Flex Sensor 2.2测量实际弯曲角度,该传感器形为带状,质地柔软,能够很好地贴合在手指背部。在舵机控制板上写入与仿真相同的驱动函数,通过stm32f107的AD模块进行数据采集,采样频率为100 Hz,并将采集的数据通过蓝牙模块传输至上位机;通过软件Matlab对角度信号进行处理。试验平台如图12所示。

1.电源 2.舵机控制开发板 3.面包板 4.数据采集装置 5.电源 6.蓝牙发送模块 7.机械手 8.弯曲角度传感器
本试验对8组试验数据进行综合处理,食指各关节的角度变化和角速度变化如图13所示。

图13 食指各关节的角度和角速度变化
由图13a可知,MCP Joint最大转动角度的平均值为82.3°,PIP Joint的最大转动角度的平均值为69.2°,实际角度与理论角度之间的误差分别为3.1%、1.1%,重复性误差均小于5%。由图13b可知:由于装置装配难免有间隙,在0.3 s和3.7 s左右食指的关节角速度有突变,此时关节的角度处于接近0°的位置,此时角速度较小且手关节本身就有缓冲冲击的特点[16](见图11),采用弹性绑带固定手指,在关节速度突变时起到一定的保护作用,使得机械手对人体的安全性得到保证;2个关节角速度的极值分别为70°/s、65.5°/s,且角速度的曲线走势与仿真所得的曲线一致。
综上分析可知,机械手耦合手指关节的运动角度能够满足设计要求,关节的角速度在仿真所允许的范围之内,能够达到脑卒中患者手部康复训练的要求。
4 结 论
(1) 本文针对目前手部康复训练装置价格昂贵、相容性差、受力不合理的现状,基于人手生物学特点,设计了一种适用于脑卒中偏瘫患者手部康复的机械手。该机械手手指采用单电机驱动,利用双平行四边形投影机构和轴线重合的结构相结合的方式带动患指,具有较好的相容性。
(2) 根据实际穿戴需求,设计了腕关节和桡尺关节机构。建立了机械手手指传动机构和执行机构的运动学模型,推出机械手与手指运动理论运动学函数,并仿真得出结果。试验结果证明,手指运动角度重复性误差小于5%,运动角速度与仿真结果一致,验证了机械手运动的可靠性,表明该机械手能够满足手部康复训练的要求。
(3) 通过样机的试验和理论证明初步验证了本文机械手设计的可行性,对手部康复训练有一定的促进作用。但是由于试验样本容量较少,其康复的有效性需要做进一步验证。
猜你喜欢
现代仪器与医疗(2022年4期)2022-10-08
中国典型病例大全(2022年11期)2022-05-13
现代仪器与医疗(2022年1期)2022-04-19
中国听力语言康复科学杂志(2021年6期)2021-12-21
机电工程技术(2021年3期)2021-09-10
现代仪器与医疗(2021年1期)2021-06-09
小哥白尼(野生动物)(2021年12期)2021-03-29
电子制作(2019年13期)2020-01-14
环球时报(2019-07-18)2019-07-18
轻兵器(2019年5期)2019-06-21
