
遥操作拖拉机路感模拟系统设计与实验
2022-04-07 13:57:02薛金林曹梓建李雨晴
农业机械学报 2022年3期
薛金林 曹梓建 李雨晴
(南京农业大学工学院, 南京 210031)
0 引言
农业拖拉机在田间工作时,其工作环境较为恶劣并且复杂多变,驾驶员长期驾驶拖拉机不仅容易疲劳而且会导致作业质量下降,甚至有可能发生意外事故,遥操作系统可以实现远程操控,很好地解决了这个问题[1-4]。但由于遥操作驾驶员远离拖拉机,因此对于路面信息的了解较少,不利于驾驶员对路面的判断。因此需要对遥操作拖拉机进行路感模拟设计。
目前对于路感的设计方法主要有3种,即传感器测量法[5]、动力学计算法[6]以及参数拟合法[7]。BAHAI[8]在转向电机上安装电流传感器,并且通过算法估计出方向盘的阻力矩,通过路感电机反馈给驾驶员。从光好[9]建立方向盘力矩模型,选取路感有关的变量,拟合出方向盘力矩。谢有浩等[10]将线控转向系统转向电机的转向阻力矩等效为所克服转向负载的方法,设计方向盘操纵转向阻力矩,使之更接近传统车辆的路感。刘彦琳等[11]建立汽车线控转向动力学模型进行仿真分析,仿真结果表明所提出路感反馈策略能为驾驶员提供合适的路感。赵含雪等[12]通过线控转向系统转向电机驱动电流对反馈主力矩进行设计,结合参数拟合法和动力学计算法,清晰地还原了路感。杨学平等[13]从路感的影响因素出发,提出路感模拟的经验公式,并采用模糊控制的方法来研究经验公式中各函数和路感的关系,结果表明模拟出的路感提高了驾驶员的舒适性。解后循等[14]对农用车辆电动液压助力转向系统方向盘反馈力矩数学模型进行了分析,结果表明该方法能有效提高方向盘动态反馈力矩的精度。魏波等[15]通过控制力矩电机电流的大小和正负来分别控制输出力矩的大小和方向,结果表明系统有效可靠。
以上均是对具备线控转向系统的传统车辆进行路感的设计,而对于遥操作车辆的路感研究较少。本文借鉴线控转向系统中路感的研究思路,结合传感器测量法和参数拟合法,以遥操作拖拉机为平台对其路感进行测试和模拟,首先提出系统的设计要求以及总体设计方案,再对拖拉机的路感产生机理进行分析,通过对现有拖拉机的转向系统进行改造以及路感测试系统的软硬件设计,完成遥操作拖拉机在不同路面的路感采集反馈实验,最后通过罗技转向操纵装置对不同路面的路感进行模拟,以实现路感再现。
1 总体设计方案
所设计的遥操作拖拉机路感模拟系统应满足以下设计要求:①驾驶员可以通过发送指令远程实时控制拖拉机。②遥操作驾驶员可以通过摄像头观察到路面类型以便于路感模拟模式的切换。③驾驶员可以通过方向盘式操纵装置实现转向并获得路感。
遥操作拖拉机路感模拟系统由遥操作控制端和拖拉机端组合而成,如图1所示,两者通过无线网络进行信息传输。遥操作驾驶员通过上位机下达加速、刹车及熄火等指令,转向指令的发送和路感模拟则是采用Logitech G29方向盘式转向操纵装置来完成,行驶时通过摄像头反馈的路面信息确定路面类型,然后通过按键切换来完成不同路面路感模拟。拖拉机端的视觉系统由前置摄像机和顶置摄像机组成,分别用来获取道路前方以及拖拉机周边的环境信息和路面种类,而路感的测试则是由安装在方向盘上的转矩传感器来完成。遥操作拖拉机路感模拟系统设计思路如下:首先通过加装在方向盘上的转矩传感器测得拖拉机在草地、水泥路等几种典型路面不同方向盘角度对应的转向阻力矩,拟合出遥操作拖拉机在不同路面上方向盘角度和转向阻力矩的关系。然后将前一步中得到的关系即几种路面力反馈情况定义在Logitech G29转向操纵装置的按键上,最后行驶时通过摄像头的视觉反馈确定路况,然后通过按键切换,由此完成路感模拟的模式化设计。
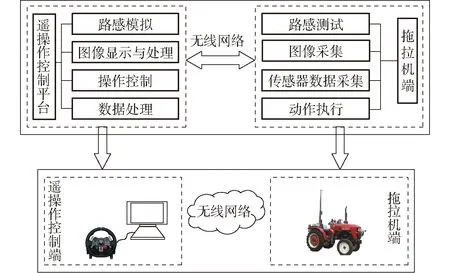
图1 遥操作路感模拟系统框图Fig.1 Road feel simulation system for teleoperation
2 拖拉机路感产生机理分析
路感就是车辆在直线行驶或转向的过程中,驾驶员通过方向盘感受到的路面传递给方向盘的力矩信息。一般分为3类[16]:直线行驶中的路感、回正过程中的路感和转向过程中的路感。本文在利用Logitech G29转向操纵装置对路感进行模拟时不希望操纵装置震动较大,同时转向操纵装置具备良好的回正性能,因此本文仅对转向过程中的路感进行研究。
方向盘的转向阻力矩Td主要由理想反馈力矩Tfb、摩擦力矩Tfr、限位控制力矩Tlim、阻尼控制力矩Tdamp组成[16-17],即
Td=Tfb+Tfr+Tlim+Tdamp
(1)
理想反馈力矩即车辆在行驶时反馈给驾驶员的力矩,它反映了车辆的行驶状态、路面的附着情况以及回正力矩的变化等。该力矩是方向盘转向阻力矩的重要组成部分,很多路感的设计都是围绕该力矩展开。
摩擦力矩主要是由转向系统中各个机械部件之间的相互摩擦造成的,该力矩并不能反映出车辆和路面的相关信息,不属于有效的路感信息,可以说是有效路感的“噪声”,但在对路感模拟要求较高的系统中不可忽视。
车辆在高速行驶的过程中,方向盘较小的转角变化可能就会使车辆失去稳定性,为了避免这一现象的发生,在路感力矩中加入了阻尼控制力矩,对高速行驶中车辆的转向起阻碍作用。该力矩和方向盘的角速度和车速呈正比例关系,有
Tdamp=Cdamp(v)ω
(2)
其中
(3)
式中Cdamp(v)——与车速v有关的函数
ω——方向盘角速度v1——临界车速
kdamp——与车速相关的系数,用于调节阻尼
限位控制指的是转动方向盘可以达到的最大角度,在传统的转向系统中,驾驶员和方向盘直接接触,因此可以感受到方向盘的左右极限位置,而在遥操作系统中,限位控制需要重新设计,通过软件设计实现驾驶员对转动左右极限位置的感知。当方向盘转动到左右极限位置时引入参数Tlim,即
(4)
式中θ1——方向盘转动角
θlim——方向盘左右极限位置对应转动角
klim——限位控制力矩系数
由于拖拉机行驶速度较低,可以不考虑阻尼控制力矩。而对于限位控制力矩,可以在Logitech G29方向盘中通过相关函数设置其左右极限从而使遥操作驾驶员感受到拖拉机方向盘的极限位置。因此,本文重点考虑理想反馈力矩和摩擦力矩,它们最终折算到方向盘上形成方向盘转向阻力矩,在第4节对方向盘转向阻力矩进行实测。
3 遥操作拖拉机路感测试与模拟系统设计
为了测试拖拉机在不同路面的路感为路感模拟提供数据支持,首先对现有拖拉机的转向系统进行改造,其中包括传感器与转向执行机构的安装等,同时设计了路感测试系统的软硬件,最后对Logitech G29方向盘进行二次开发来实现路感的模拟。
3.1 拖拉机转向执行机构改造
原有转向系统采用电机作为执行机构,并和齿轮系相结合来带动方向盘实现转向的方式,由于需要测试方向盘的转向阻力矩,因此在方向盘和转向电机之间安装扭矩传感器,如图2所示,传感器的下端轴通过齿轮和电机的齿轮啮合,上端轴的齿轮作为主动轮和方向盘上的从动轮啮合,从而实现转向以及方向盘力矩的测量。

图2 改造后的转向系统结构图Fig.2 Structure diagram of modified steering system
该系统测量方向盘扭矩的原理为:给系统上电后,当转向电机带动传感器的轴转动时,传感器轴上端的主动轮带动方向盘的从动轮转动,由于方向盘转动过程中受到地面的阻力作用,因此传感器的轴会发生扭变,该传感器采用应变片电测技术,当传感器的轴发生扭变时应变片会产生电信号,将测得的电信号经过传感器内部电路放大等一系列处理后使之成为便于系统采集的电压信号。
原有转向电机小齿轮齿数为17,模数为3.5 mm,方向盘大齿轮齿数为73,模数为3.5 mm。选取最佳安装位置后,经过测量,传感器上端轴与方向盘转向轴的中心距为165 mm,电机转轴与传感器下端轴的中心距为65 mm,根据
d=mz
(5)
(6)
式中m——齿轮模数z——齿轮齿数
z1——齿轮1齿数z2——齿轮2齿数
d——分度圆直径a——中心距
计算可得传感器上下轴齿轮齿数分别为21和20。
为了能够精确地测量方向盘的转向阻力矩,传感器采用JN-DN型旋转(动态)扭矩传感器,该传感器多用于电动机、发动机、内燃机等旋转动力设备输出扭矩及功率的检测,具有检测精度高、稳定性好、抗干扰性强等优点。传感器量程为-5~5 N·m,经过计算量程满足测量要求,为了便于采集,选用的微型JN-DN型传感器输出信号为1~5 V的模拟电压,且输出电压和力矩线性相关。
3.2 遥操作拖拉机路感测试系统设计
3.2.1路感测试系统硬件优化设计
原有的车载控制ECU采用的是基于ATMEGA8处理器的DM368控制板,在发送指令时极易出现数据拥堵的情况,因此对其进行了更换。替代主板需要满足的条件:①硬件接口具有至少5路模拟量输入接口,8路开关量输出接口,具备RS485通信功能。②软件运行环境要求可以运行Linux操作系统,具备RS485、开关量、模拟量、相应的底层API接口、支持多线程程序。为了满足上述要求,选取树莓派4B作为系统的主控制器,相比于之前的处理器,树莓派4B的性价比较高,同时具有体积较小、稳定高效等优点,多用于物联网、人工智能等产品开发,应用领域较为广泛[18-19],同时选取AI扩展板、DO扩展板以及RS485通信板,可以满足8路AD采集和开关量控制。车载控制系统结构如图3所示。遥操作驾驶员通过NVR(网络硬盘录像机)回传的前置摄像机以及顶置摄像机的视频流来获取拖拉机周围的环境以及路面的种类,同时通过遥操作控制台发送指令实现对各个执行机构的控制。树莓派控制模块主要包括树莓派主控板、AD采集板以及继电器开关控制板,实现对车轮转角、踏板位移以及方向盘转向矩信息的采集,并由NVR通过无线网络传输给遥操作端,其中对于方向盘转向阻力矩的采集仅在调试时采用树莓派,而在实测时采用基于LabVIEW设计的传感器数据实时读取平台。
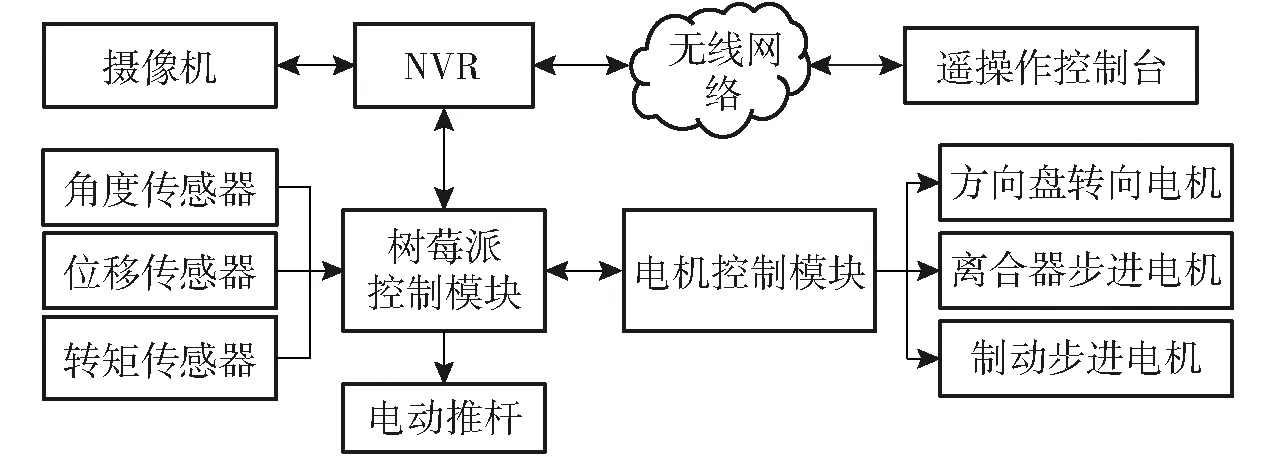
图3 车载控制系统结构框图Fig.3 Structure diagram of on-board control system
3.2.2路感测试系统软件设计
系统的主程序采用C语言编写,主程序流程如图4所示,程序开始时首先进行初始化,然后打开串口对串口的参数进行设置,包括端口号、波特率、数据位等设置,接着判断是否关闭串口,如果是,则关闭串口,运行结束;如果否,则给树莓派上电后,运行程序tractor_ctl,与树莓派进行通信,如果通信成功,则串口调试助手上显示“UART OK!”,此时可以通过串口发送相关操作指令,指令执行完成后会把相关数据发送到树莓派显示器的Linux终端上。
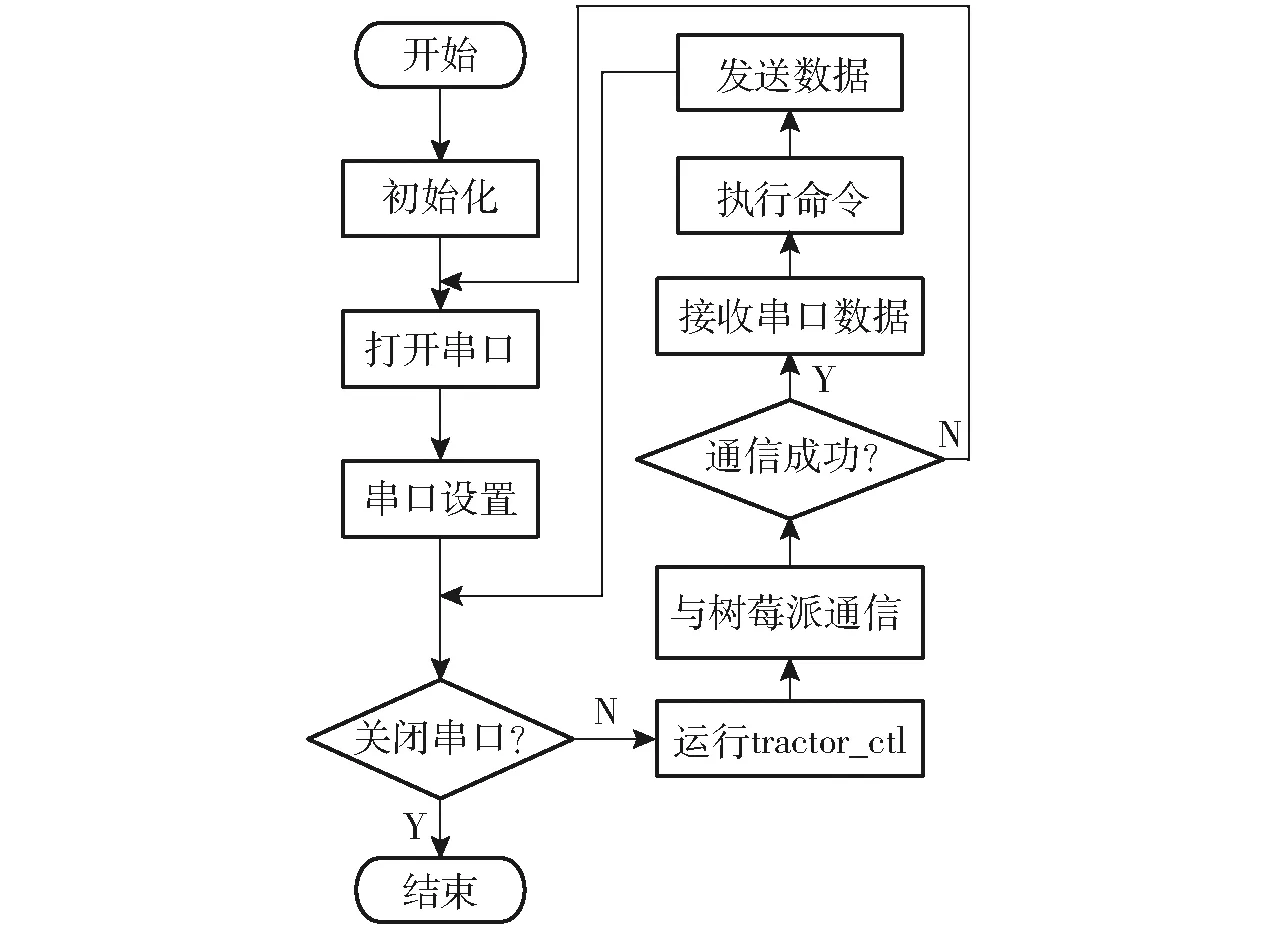
图4 主程序流程图Fig.4 Flow chart of main program
本文的路感实时数据采集软件基于LabVIEW开发,测试页面如图5所示。
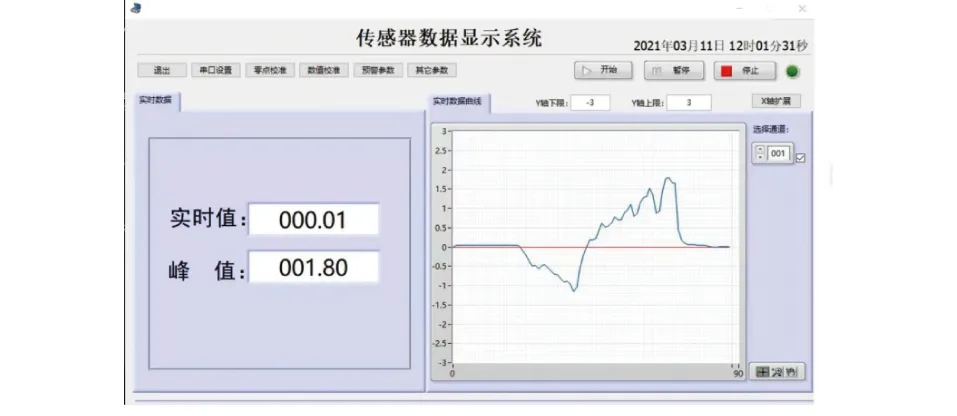
图5 路感数据读取界面Fig.5 Interface of reading road feeling data
3.3 遥操作拖拉机路感模拟系统设计
文献[20-23]表明路感力矩与车速以及方向盘的转向角相关,车速对于路感力矩的影响相对于转角较小,由于拖拉机是中低速行驶的车辆,因此车速对于转向路感的影响更是微乎其微,本文将在第4节对遥操作拖拉机不同车速下的转向阻力矩进行实测来验证这一结论。以草地路感模拟为例,路感模拟的过程如图6所示,首先进行程序初始化。然后检测草地路感模拟按钮是否被按下,如果是则调整路感为草地模式,同时读取Logitech G29转向操纵装置的转向角来实现模拟力矩的改变,直到检测到草地模拟按钮被释放,则结束该模式下的路感模拟。其他路面路感模拟类似。
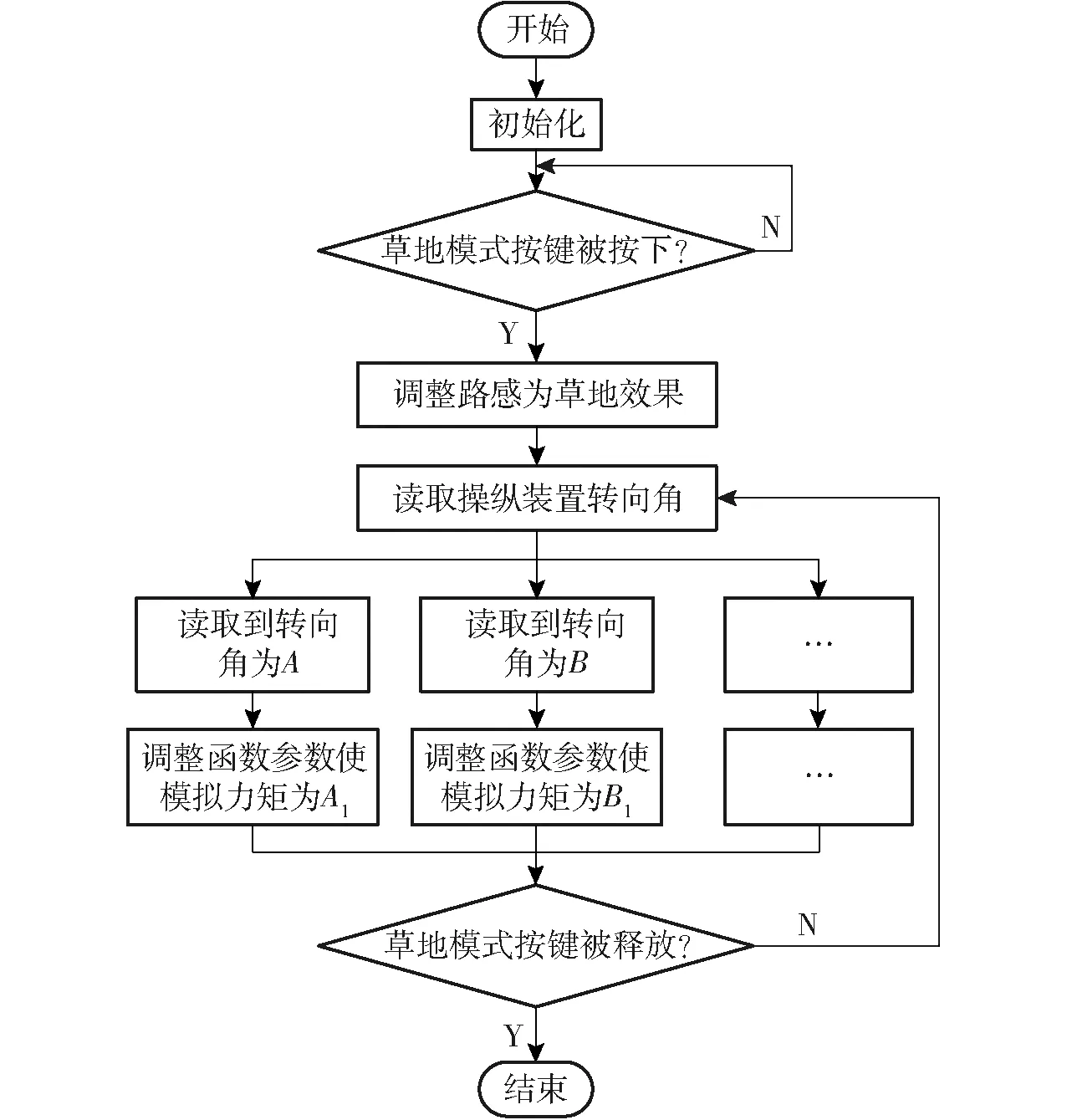
图6 草地路感模拟流程图Fig.6 Simulation flow chart of road sense for grass
Logitech G29转向操纵装置具备力反馈且反馈力大小可调的功能,将不同类型路面的模拟函数定义在Logitech G29转向操纵装置的按键上,如图7所示,行驶时通过摄像头的视觉反馈确定路面类型,然后通过按键切换,实现路感的“再现”。

图7 方向盘按键功能制定Fig.7 Steering wheel key function formulation
4 遥操作拖拉机路感实测与路感模拟评价
选择转角作为路感力矩的影响因素,对拖拉机不同路面不同转角下的路感力矩进行实测,并将实测的转向阻力矩数据和转角的关系进行拟合,作为路感模拟的参考依据以便于Logitech G29方向盘进行路感的模式化设计。
4.1 遥操作拖拉机路感测试
4.1.1实验方法
当拖拉机前轮与后轮平行时,此时方向盘转角为0°,右转方向盘时所测转向阻力矩为正,左转方向盘所测力矩为负,发送转向指令使方向盘转动一周,便可以得到转向阻力矩随时间的变化关系,转向电机带动方向盘的转动为匀速圆周运动,方向盘转动一周为360°,因此可以将转向阻力矩随时间的变化关系看作是转向阻力矩随角度的变化关系,通过LabVIEW将实验数据导出,并通过Matlab拟合出方向盘转角-转向阻力矩的关系曲线作为路感模拟的参考。
由于传感器和方向盘之间采用齿轮传动,因此传感器测量的转矩并非方向盘的转向阻力矩,方向盘转向阻力矩计算示意图如图8所示,其中1、2为传感器齿轮,齿数分别为20和21,3、4分别为转向电机齿轮和方向盘齿轮,齿数为17和73,方向盘转向阻力矩和传感器所测转矩的关系为
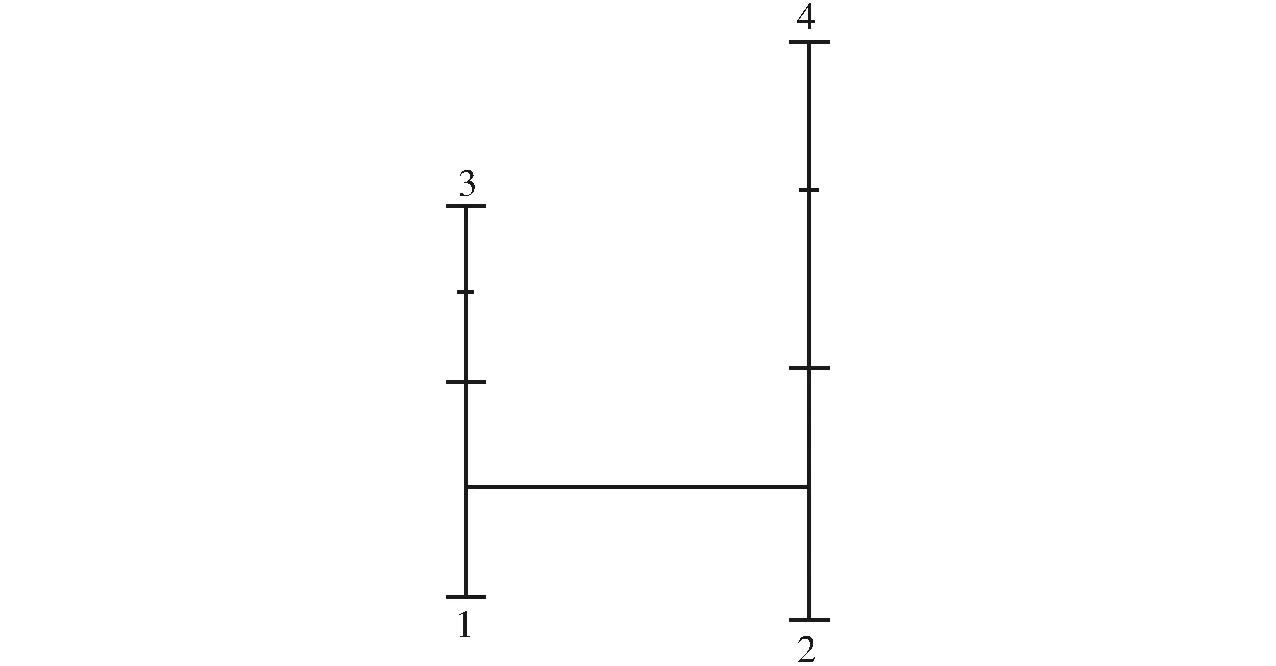
图8 方向盘转向阻力矩计算示意图Fig.8 Diagram of steering wheel torque calculation diagram
(7)
式中Td——方向盘转向阻力矩
Tse——传感器所测力矩
zst——方向盘齿轮齿数
zse——传感器齿轮齿数
η——齿轮传动效率,通常取0.98
为了测试系统的性能,进行实车测试之前在南京农业大学农机实验室内对拖拉机原地转向的力矩进行了实测,结果如图9所示。由图9可知,转角和转向阻力矩的关系较为复杂,且曲线波动较大,因此在实车实验时为了观察转向阻力矩的变化趋势需对力矩曲线进行平滑处理。
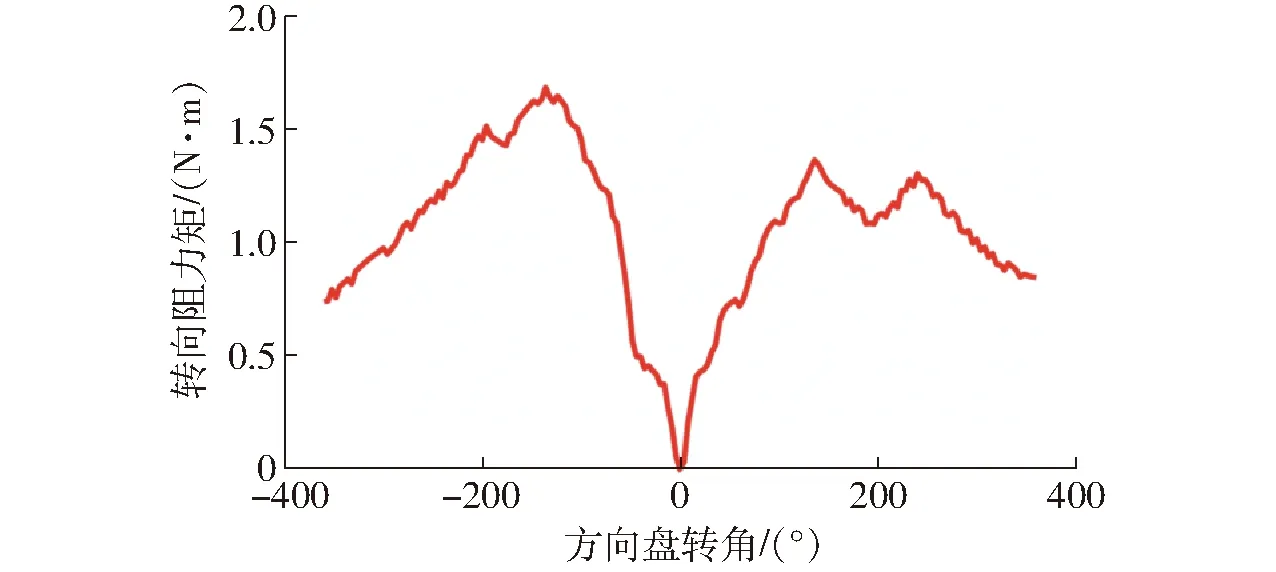
图9 室内原地转向阻力矩曲线Fig.9 Curve of in-situ steering torque in laboratory
由文献[24]可知,拖拉机在作业环境下速度通常为2~10 km/h,而在非作业环境下速度为10~25 km/h。本文将水泥和石子路面作为遥操作拖拉机在非作业模式下路感模拟的参照,将草地和土路面作为遥操作拖拉机在作业模式下路感模拟的参照。
4.1.2草地路感实测
拖拉机在作业环境下通常处于直线行驶状态并且车速较低,而转向一般发生在地头,可以看作是原地转向。本文对拖拉机在草地上原地转向和行驶过程中的转向路感进行了实测,其中在对行驶中的拖拉机进行路感实测时,车速取为5、8、10 km/h,实验场景如图10所示,选取长度约为100 m的草坪作为实验场地来完成测试。

图10 草地路感实测场地Fig.10 Site of measuring grassland road feeling
实验结束后利用Matlab对实验数据进行处理,并采用Curve Fitting工具对关系曲线进行拟合,结果如图11所示。由图11可知,拖拉机在草地上原地转向和行驶转向时最大转向阻力矩分别为1.95 N·m和1.67 N·m,无论是左转或者是右转,转向阻力矩都随着转角的增大而增大,但是都在方向盘处于100°~120°时开始回落且在200°时有小幅度的上升,同时不同车速下转向阻力矩相差不大,拖拉机行驶转向时的转向阻力矩比原地转向时略小。
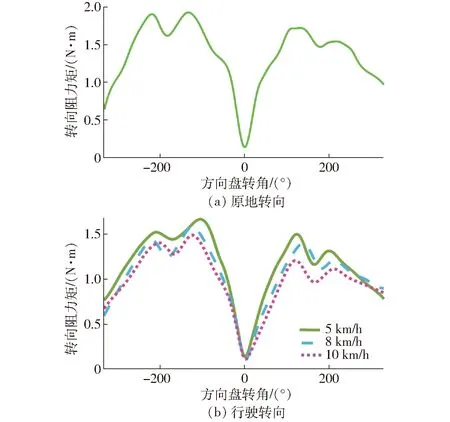
图11 草地原地及行驶转向阻力矩曲线Fig.11 Curves of in-situ and running steering torque on grass
4.1.3水泥路面路感实测
拖拉机在非作业环境下行驶时车速一般较高,因此在进行拖拉机行驶转向路感测量时拖拉机的行驶速度分别选取10、15、20、25 km/h,用石灰粉标记转向的地方,如图12所示,当拖拉机到达参考线时完成转向操作。

图12 水泥路面路感实测场地Fig.12 Site of measuring cement road feeling
实验结果如图13所示。由图13可得,拖拉机在水泥路面原地转向和行驶转向最大转向阻力矩分别为3.97 N·m和2.71 N·m,与草地上转向阻力矩的变化趋势相同,转向阻力矩都随着转角的增大而增大,并在方向盘转角处于100°~120°时开始有所回落且在200°时有小幅度的上升,而行驶状态下的转向阻力矩明显小于原地转向。由图13b可得,车速对转向阻力矩的影响较小,最大相差0.5 N·m。通过比较水泥路面和草地的实测数据可知,水泥路面所测得的转向阻力矩明显大于草地。
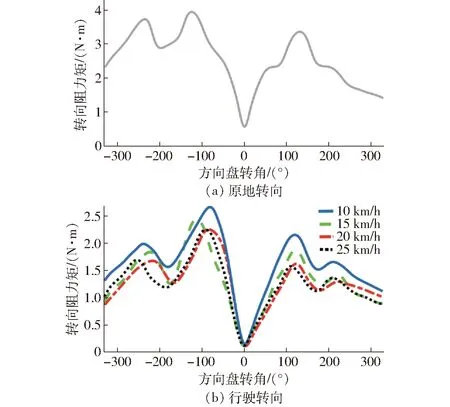
图13 水泥路面原地及行驶转向阻力矩曲线Fig.13 Curves of in-situ and running steering torque on cement road
4.2 遥操作拖拉机路感模拟与评价
参考不同路面的力矩曲线,将不同路面转角-转向阻力矩变化关系写入转向操纵装置后,定义各个路面的模式切换按钮,对草地和水泥路面的路感模拟展开评价,实验场景如图14所示。

图14 路感模拟实验场景Fig.14 Scene of road feel simulation test
分别在草地和水泥路面进行地头转向实验和直角转弯实验,拖拉机行驶轨迹如图15所示。
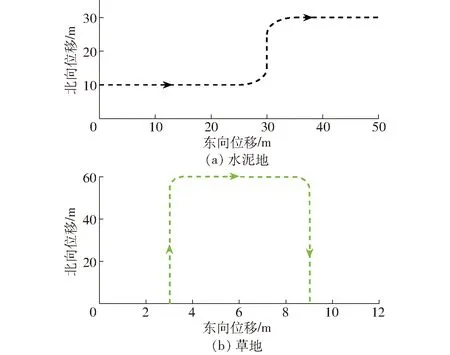
图15 拖拉机行驶轨迹Fig.15 Movement track of tractor
路感的评价方法包括客观评价和主观评价两种常见的评价方法。客观评价是将一些参数作为路感评价的参考指标,为路感评价提供数据支持。一般将中心操纵、反馈力矩水平和梯度、力反馈表现等参数作为评价路感的指标[25],只需将各个参数控制在一定的范围内,驾驶员就可以获得理想的路感。由于客观评价中部分参数的测量有一定困难,因此本文采取主观评价的方法对基于Logitech G29方向盘模拟的路感展开评价,评价指标如表1所示。
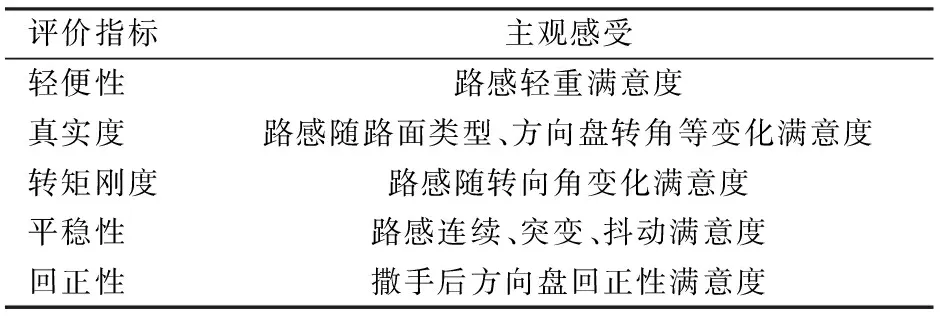
表1 主观评价指标Tab.1 Subjective evaluation indexes
具体评价方法如下:选取从未接触过遥操作系统的驾驶员6名,年龄20~30岁之间,其中女性1名,每个人都通过Logitech G29转向操纵装置远程操控完成左右转弯3次,针对路感模拟的轻重、转矩刚度以及平稳性展开评价,满分10分,取每个人3次评价得分的平均值作为此驾驶员的评分,再求6个人每一项的评分均值作为该项评价指标的得分。由于Logitech G29转向操纵装置本身具备良好的回正性能,因此对于转向的回正性无需评价。轻便性、转矩刚度、平稳性、真实度得分分别为8.5、7.1、6.3、6.7。通过Logitech G29转向操纵装置模拟出的路感评分均在6.3~8.5分之间,验证了该方法模拟路感的可行性。
5 结论
(1)基于一台已经搭建完成的遥操作拖拉机进行了转向系统改造,实现了转向路感的测试,并采用Logitech G29方向盘式转向操纵装置对路感进行设计,完成了路感的模拟。
(2)对拖拉机在不同路面的路感进行实测,实验结果表明,转向阻力矩随着转角的增大而增大,并在方向盘转角处于100°~120°时开始回落且在转角在200°左右有小幅度的上升。通过Logitech G29转向操纵装置对遥操作拖拉机路感展开模拟,各项评价指标得分均在6.3~8.5分之间,表明了该方法模拟路感的可行性。
猜你喜欢
小学生学习指导(小军迷联盟)(2021年11期)2022-01-18 05:14:00
中学生数理化·七年级数学人教版(2021年9期)2021-11-20 06:11:52
今日农业(2020年16期)2020-12-14 15:04:59
知识经济·中国直销(2018年3期)2018-04-12 06:43:36
传媒评论(2017年8期)2017-11-08 01:47:36
解放军健康(2017年5期)2017-08-01 06:27:42
小学生导刊(2017年15期)2017-05-17 05:44:08
小布老虎(2016年12期)2016-12-01 05:47:00
知识经济·中国直销(2016年2期)2016-11-07 09:33:42
交通建设与管理(2015年13期)2015-03-20 15:18:48
