
永磁同步电动机控制半实物仿真系统设计
2022-04-06 10:08周林娜金南南杨春雨
实验室研究与探索 2022年2期
周林娜, 金南南, 王 海, 杨春雨
(中国矿业大学信息与控制工程学院,江苏徐州 221008)
0 引 言
电机控制是控制科学与工程、电气工程、机械电子等专业的重要教学研究内容,而永磁同步电动机(Permanent Magnet Synchronous Motor,PMSM)因具有体积小、输出转矩大、制动性能优异等特性,广泛应用于交通运输、农业生产和工业制造等领域[1-4],将PMSM控制引入实验教学具有重要的应用价值。在Matlab仿真中,电动机矢量控制模型是忽略电动机涡流、高次谐波等条件下建立的,与实际的电动机存在着差异,在实验教学中需考虑硬件接口电气特性、电动机参数在实际运行中受温度的影响、驱动装置的内部电气特性等诸多因素[5-6]。采用这种Matlab仿真无法反应电动机的实际运行状态。为研究电动机的实际工作状态,国内外学者提出了将FPGA、DSP和MCU应用到电动机控制实验中[7-11],需要花大量时间去编写程序和设计电路,时间长、重复性工作多,不满足实验教学的要求。本文利用dSPACE软硬件环境设计了一套PMSM半实物仿真系统且加以传统的PI控制算法和较先进的滑模控制算法进行验证[12],学生在实验时用自己设计的控制算法替换模型中的调节器便可轻松验证自己的控制算法的合理性,在实验教学中取得了显著的效果[13-16]。
dSPACE实时系统能实现与Matlab/Simulink完全无缝连接,dSPACE具有高速运算的处理器和丰富的I/O接口,在航天航空、汽车、机器人及工业控制等领域应用越来越广泛。很多高校使用dSPACE来弥补理论知识无法应用到实际的缺陷,使得控制算法实现变得简单、方便、快捷,降低了实验项目建设成本,成为理论知识学习和实验教学之间的桥梁[17]。本文dSPACE半实物仿真系统将Matlab仿真模型中的部分模块用实物代替。其中,PMSM模块采用实际电动机;逆变器模块用调压器和变流器代替来驱动电动机;上位机代替模型中示波器及参数给定端口;实际的硬件连接线代替模型中的逻辑连接线。转速调节器、电流调节器、坐标变换和SVPWM模块保持不变,用硬件接口替代原来的连接关系,在Matlab仿真和半实物仿真之间添加并配置相应的I/O接口,这样便构成了完整的仿真模型。dSPACE半实物仿真系统可以生成PMSM运行时的系统参数变化曲线图,让学生实时观测和调整参数,加深学生对理论知识的理解,为教学和科研创新奠定基础。
1 基于d SPACE的PMSM半实物仿真实验系统设计
1.1 硬件系统设计
图1为半实物仿真系统硬件设计原理框图,主要有3部分组成,分别是上位机、dSPACE硬件平台和PMSM硬件系统。

图1 硬件系统设计原理图
基于dSPACE的PMSM半实物仿真实验平台的硬件系统包括MicroLabBox控制器、转接板、调压器、变流器、永磁同步电动机、上位机以及一些硬件连接线,PMSM控制实验台如图2所示。
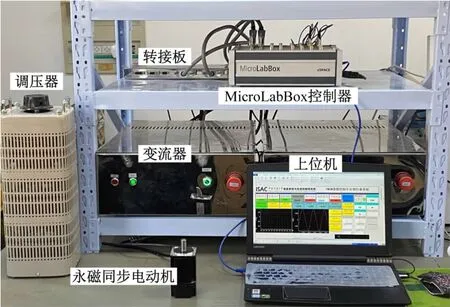
图2 PMSM控制实验台
MicroLabBox控制器是用于实验室一体化开发的紧凑型系统,能快速简单的实现系统控制测试或测量,拥有专门的电动机控制功能以及CAN总线和以太网接口,控制器面板上有丰富的高性能I/O通道,可以高速运行PMSM控制回路。MicroLabBox中RTI模块为I/O接口提供简单、便捷、全面的配置选项,PMSM的输出信号可以通过BNC和Sub-D连接器轻松访问模拟量和数字量的I/O通道。
上位机与MicroLabBox通过UTP网线连接;变流器连接到转接板之后通过BNC线和DB50线分别实现模拟量和数字量的传输;调压器连接到变流器用来提供三相电压可变的交流电(逆变器的直流母线电压是调压器输出电压值倍);实验中用的电动机为ACSM60-G00630LZ。电动机的驱动线和编码器信号线连接到变流器中的对应接口。这样便构成了完整的PMSM半实物仿真硬件系统。
1.2 软件系统设计
Matlab仿真模型主要由转速调节器、电流调节器、i-park坐标变换、SVPWM、逆变器、PMSM等模块组成,PMSM矢量控制模型如图3所示[18]。本文采用单台永磁同步电动机id=0双闭环矢量控制方法,首先,转速误差通过转速调节器实现转速的闭环控制;dq轴电流误差经过电流调节器实现电流的闭环控制,输出uq和ud;和电动机的反馈角θ一起经过i-park模块将dq坐标系下的值转变为αβ坐标系下的值,输出了uα和uβ;再经过SVPWM模块与三角波对比调制出方波脉冲,脉冲通过逆变器模块的开关特性生成可直接供给电动机运行的三相电;Clark模块将参考定子的三轴二维坐标系下的采样值(ia,ib,ic)转换为双轴静止坐标系下的值(id、iq);示波器用来观测速度、电流、转矩等反映电动机运行特性的值。

图3 PMSM矢量控制Matlab仿真模型
Matlab仿真模型是完全在软件环境中建立的,而半实物仿真模型保留了部分模块,并基于RTI实时接口库配置合适的I/O端口。图4为基于dSPACE的PMSM控制系统原理图,在ControlDesk交互界面中给定电动机转速,速度偏差通过调节器后调节PMSM实际转速,通过编码器信号转换在ControlDesk交互界面中显示PMSM的状态参数变化。
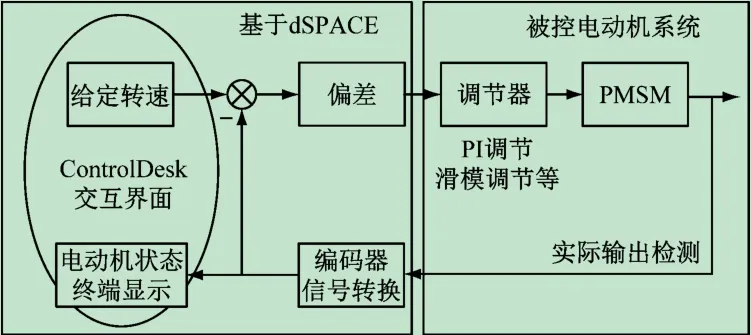
图4 基于dSPACE的PMSM控制原理图
在Matlab仿真模型基础上建立基于dSPACE的Simulink模型,如图5所示为基于dSPACE的PMSM矢量控制模型,实验中各模块参数和Matlab仿真中完全一致。dSPACE提供了多个软件组合其中包括RTI(Real-TimeInterface)、RTW(Real-Time Workshop)及ControlDesk。RTI实时接口库可通过图标的方式轻松指定用户I/O,RTI和RTW共同生成dSPACE可执行的c代码,编译系统Simulink模型便可自动下载到dSPACE控制器中,通过ControlDesk在线观测PMSM运行状态[19]。
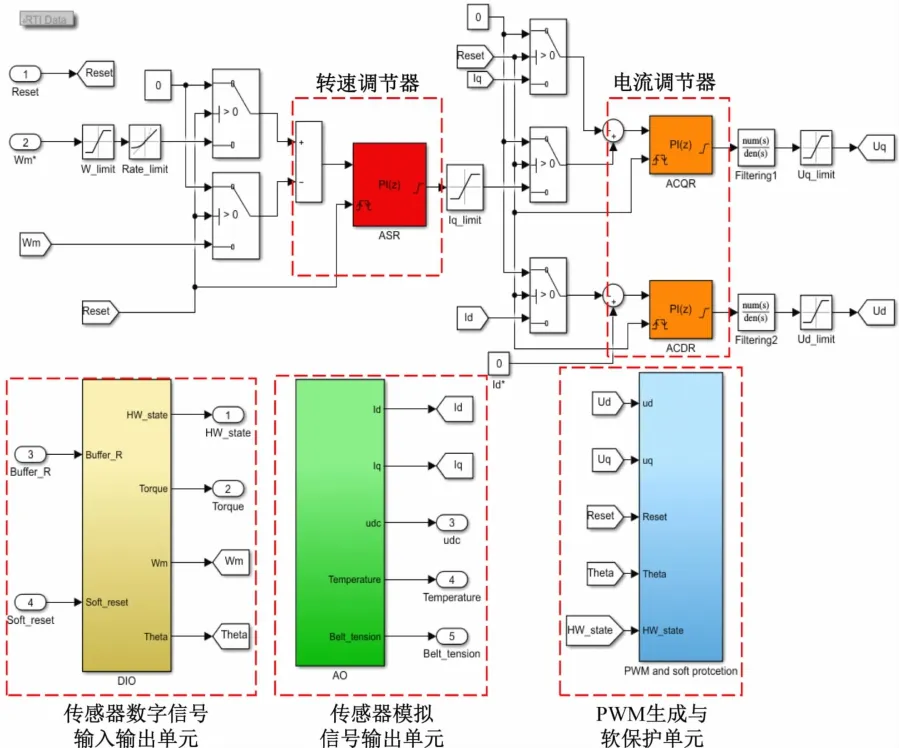
图5 基于dSPACE的PMSM矢量控制模型
在Simulink下建立的PMSM半实物仿真模型包括转速调节器、电流调节器、传感器数字信号输入输出模块、传感器模拟信号输出单元以及PWM生成与软保护单元。上位机中的ControlDesk软件可供用户自行设计观测PMSM参数变化的虚拟仪表界面,在ControlDesk界面主要设计有示波区、算法参数调整区和系统状态区3部分。
2 半实物仿真系统工作流程
半实物仿真系统可实现对永磁同步电动机的实际运行过程中各参数进行监控和整定,实验流程如图6所示。
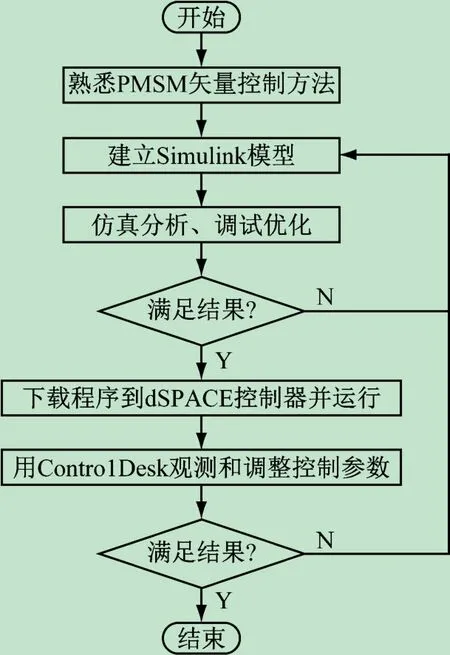
图6 基于dSPACE半实物仿真系统建模流程
具体流程如下:
(1)在Matlab/Simulink软件环境下,建立PMSM矢量控制仿真模型,仿真优化系统模型。
(2)加入dSPACE的I/O端口,配置I/O参数。保留转速调节器和电流调节器主闭环不变,添加适量的模拟量和数字量转换模块并配置与dSPACE硬件接口相对应的I/O参数,在线调试运行程序,确保系统可以准确测量到PMSM的实时状态参数。
(3)基于dSPACE控制模型调试优化完成后,用RTW的“Build”命令生成dSPACE控制器可执行实时c代码和工程索引文件,自动完成编译、连接和下载。
(4)ControlDesk加载工程索引文件完成后,便可在ControlDesk界面的算法参数调整区在线调整给定转速、转速调节器和电流调节器等参数;在示波区观测电动机的电流、转速和转矩等曲线图;在系统状态区可通过指示灯了解系统硬件状态,若系统出现故障即指示灯出现红色警报,学生可通过按下变流器急停按钮及时终止实验,以免对设备造成损坏。
3 系统测试
针对基于dSPACE的PMSM半实物仿真系统进行2个实验,实验电动机参数如下:额定功率PN=0.2 kW,反电势E=29.5 V/103r·min-1,额定电压UN=220 V,额定电流为IN=1.5 A,额定力矩为TN=0.6 N·m,额定转速nN=3 000 r/min,峰值力矩TN=1.8 N·m,线电感L=9.8 mH,转子惯量J=2.1×10-5kg·m2,线电阻为R=10.7Ω,极对数np=4。实验要求Matlab仿真和半实物仿真中给定转速、调节器参数、SVPWM模块、逆变器、电动机参数、坐标变换模块均相同。
实验1转速调节器用传统的PI控制算法,在实验测试中,上位机虚拟仪表中设置控制算法参数,具体为:ASR的PI参数KP=0.04、KI=0.015;ACQR的PI参数为KP=0.02、KI=0.2;ACDR的PI参数为KP=0.02、KI=0.2;给定角速度150 rad/s。实验结果如图7、8所示。由图可见,半实物仿真系统的仿真波形与纯Matlab仿真波形近似度很高,说明半实物仿真系统有效。

图7 基于PI调节器的MATLAB仿真波形
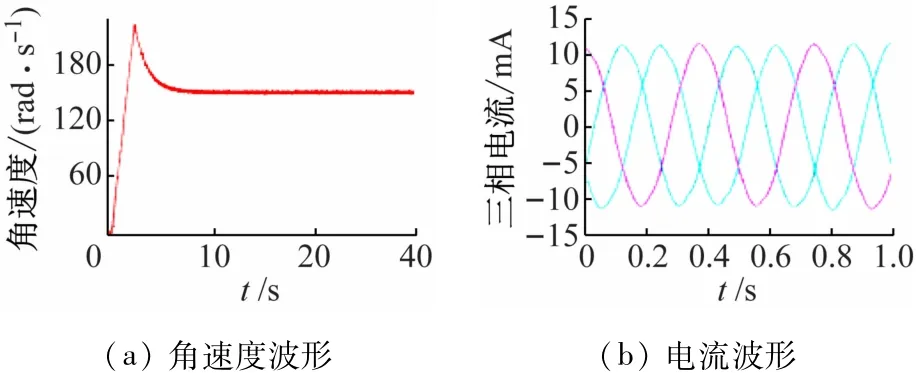
图8 基于PI调节器的半实物仿真波形
实验2转速调节器选用如图9所示滑模控制算法[20],其中参数c=1 200,其大小决定滑模面表达式中速度偏差或偏差导数所占的权重;α=10,在设计时要大于干扰项的幅值;β=100,其大小决定趋近滑模面的速度;γ=1 200,与参数c作用相同;Δ=1.24×10-5,是根据PMSM的极对数、转动和磁链计算所得。给定角速度150 rad/s。图10为基于滑模调节器的Matlab仿真速度和电流波形。图11为基于滑模调节器半实物仿真速度和电流波形。可见,半实物仿真系统能够有效验证滑模控制算法。

图9 滑模调节器工作原理

图10 基于滑模调节器的MATLAB仿真波形
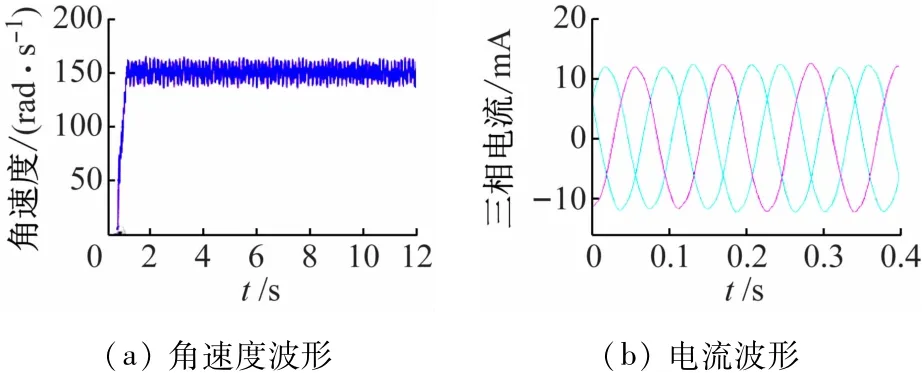
图11 基于滑模调节器的半实物仿真波形
2个实验结果表明,PMSM的Matlab仿真和半实物仿真结果一致。滑模控制比传统的PI控制速度跟踪快、超调小且具有更强的鲁棒性。滑模控制本质是不连续的开关特性决定了系统存在“抖振”问题。由以上分析可得,基于dSPACE的PMSM半实物仿真系统可以轻松运行不同控制算法,并且实验结果可信度高。
4 结 语
本文利用dSPACE软硬件环境设计了一套PMSM半实物仿真系统,通过PI控制和滑模控制2个实验验证了其可行性和有效性。学生在PMSM模型的速度环替换控制算法便可轻松验证自己设计的控制算法的实际运行效果,节约了编程时间,通过ContolDesk可视化界面在线调整模型参数,实现不同算法的灵活配置,克服了纯Matlab仿真实验的缺点。在传授学生理论知识的同时引入实验教学的方式,可使学生学以致用,培养学生的动手能力,提高教学效率。
猜你喜欢
中国惯性技术学报(2019年6期)2019-03-04
宇航计测技术(2018年3期)2018-09-08
制造技术与机床(2017年6期)2018-01-19
北京航空航天大学学报(2017年1期)2017-11-24
北京航空航天大学学报(2017年4期)2017-11-23
北京航空航天大学学报(2016年7期)2016-11-16
北京航空航天大学学报(2016年4期)2016-02-27
舰船科学技术(2015年8期)2015-02-27
汽车与新动力(2015年1期)2015-02-27
中国航海(2014年1期)2014-05-09
