
台风期间浮标和潜标上ADCP的空间变化、数据误差及校正
2022-04-06 10:47柯道勋唐佑民左军成许东峰杨成浩姚志雄沈浙奇
海洋学研究 2022年1期
柯道勋,张 翰,唐佑民,5,左军成,许东峰,杨成浩,姚志雄,沈浙奇,田 娣
(1.河海大学海洋学院,江苏 南京 210098; 2.卫星海洋环境动力学国家重点实验室,浙江 杭州 310012;3.自然资源部第二海洋研究所,浙江 杭州 310012; 4.南方海洋科学与工程广东省实验室(珠海),广东 珠海 519082; 5.北大不列颠大学环境科学与工程学院,大不列颠哥伦比亚,乔治王子城 V2N4Z9; 6.上海海洋大学海洋学院,上海 201306)
0 引言
声学多普勒流速剖面仪(Acoustic Doppler Current Profiler,ADCP)是一种测量流速的海洋声学仪器,主要通过回声的多普勒频移计算流速[1-2]。ADCP测量数据时会因自身系统和外部扰动出现误差。自身系统因素包括电子元件在水中的热噪音、波束相干和定位系统误差等[3]。唐华亮 等[4]发现ADCP相关幅值和良好率参数越高,测量数据的可信度越高。外部扰动包括周围环境的噪音污染、海表和海底的折射、波浪破碎及其加速度、悬浮物(浮游生物、沉积物、气泡等)散射和湍流压力等[5]。刘娜 等[6]发现生物附着使得ADCP测量盲区增大。CHEN et al[7]发现ADCP朝上观测时,表层数据精度较其他水层低一个数量级,原因是朝上观测时,声波受海-气界面的反射,回波信号偏大。针对ADCP数据的质量控制,已有一些方案:余军强 等[8]设计了ADCP流量测验辅助程序,可以在保障观测精度的同时提高观测效率;TRUMP et al[9]根据船底的GPS数据来校准ADCP的罗经,使罗经标准误差显著降低;CHIAO et al[10]利用一种基于多分辨率的三维插值法来提高模式数据的分辨率。
台风会引起上层海洋剧烈变化,如导致海表面波振幅显著增大[11-12];导致海表水体辐散,引起局地上升流和后续的近惯性流[13-14];改变混合和上升流等过程,影响上层海洋温盐结构[15-16]。同时,台风也会导致浮标、潜标系统上ADCP等仪器在水平和垂向上的位置发生较大改变,使测量数据产生误差。目前对走航ADCP观测资料的质量控制已有较多研究[17-18],但对于台风等强扰动下浮标、潜标等观测系统上 ADCP 资料的误差和校正还缺少关注。
本文通过一套几何算法计算了台风前、后浮标和潜标上的ADCP空间变化和由此导致的流速误差,并进行相应的校正。通过台风期间观测系统上ADCP数据的质量控制,可以有效减小观测误差,提高数据的准确性,为分析海洋变化过程提供支撑。
1 数据介绍
1.1 浮标和潜标数据
浮标和潜标布放在南海北部,共设4个站位,各站均布放浮标和潜标两种观测系统,具体信息详见表1。

表1 浮标和潜标组成的布放站位信息Tab.1 Information of the deployed stations consisted in buoys and moorings
浮标投放时绳子采用“松弛”设计,即绳长大于水深,底部用重块固定。GPS安装在高度为4 m的浮标支架上,采样时间间隔为1 h。ADCP安装在浮标底部,高度为0 m,发射频率为150 kHz,向下采样,采样时间间隔为3 min,垂向分辨率为8 m,盲区为 14 m,厚层为232 m。
潜标系统处于水下,绳子通常处于绷紧状态,总长度小于水深,底部用重块固定。潜标上有2个 ADCP,都固定在同一个ADCP专用浮球上,分别进行向上和向下观测,发射频率分别为300 kHz 和 75 kHz,采样间隔分别为3 min和15 min,垂向分辨率分别为4 m和16 m,盲区分别为6 m和24 m,厚层分别为116 m和544 m。
1.2 台风数据
本文选取2014年台风海鸥(1415)进行研究,台风最佳路径数据集分别来自联合台风预警中心(Joint Typhoon Warning Center, JTWC),中国气象厅(China Meteorological Agency,CMA)和日本气象厅(Japan Meteorological Agency,JMA)。JTWC、CMA和JMA数据的时间间隔均为6 h。
9月10日台风海鸥以热带低压的形式出现在帕劳岛附近,9月11日—14日向西北移动,移动过程中强度逐渐增强成台风,9月15日到达南海北部的4个观测站位,到达的时间、距离、移速等信息见表2。9月15日下午18时,海鸥的最大持续风速达到最大,为42 m/s,9月16日登陆,9月17日减弱为热带风暴并逐步消亡。
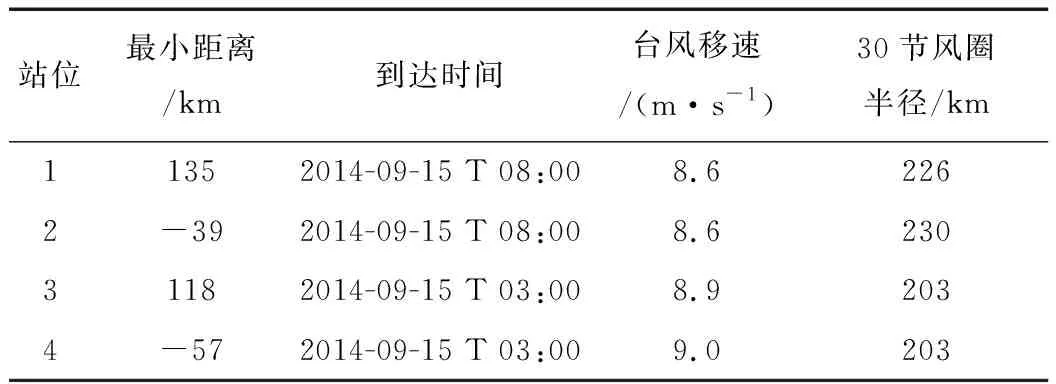
表2 台风到达观测站位时的相关参数Tab.2 Parameters of typhoon at the time reaching stations
2 台风期间ADCP数据处理方法
2.1 浮标上ADCP的空间变化、流速误差和数据校正
2.1.1 ADCP的水平位移
图1显示了浮标垂直和非垂直状态下ADCP的空间变化。垂直状态下ADCP的水平位移等于浮标系统的总绳长减去水深,即等于浮标多余绳子的长度。非垂直状态下浮标平台上ADCP的水平位移由浮标平台上GPS测的经度和纬度计算得出,计算公式为
(1)
(2)
Y(t)=2πr[latGPS(t)-lat0b]/360
(3)

图1 垂直状态(a)及非垂直状态(b)下浮标系统上ADCP的空间变化Fig.1 Spatial variation of ADCP on buoy system in vertical stage (a) and non-vertical stage (b)
2.1.2 水平流速误差和水平校正
ADCP水平位移的变化会给流速测值带来误差。ADCP的水平流速误差为ADCP的水平移动速度,计算公式为
(4)
(5)
ADCP流速水平校正的目的是得出真实水平流速,即水平流速的校正值。浮标上水平流速校正值等于ADCP水平流速测值加上ADCP平移速度,其表达式为
(6)
式中:urb(t,z)、vrb(t,z)分别是纬向和经向流速的水平校正值,z表示水深;uob(t,z)和vob(t,z)是纬向和经向流速的测值。
2.1.3 垂向位移和垂向流速误差
浮标上的ADCP随波浪起伏产生垂向位移和垂向移速,垂向移速即为垂向流速的误差。垂向移速为垂向位移的时间导数,表达式为
(7)
Svb(t)=Hm(t)+D0
(8)

2.2 潜标上ADCP的空间变化、流速误差和数据校正
2.2.1 潜标上ADCP的空间变化
台风导致潜标ADCP发生空间变化,变化参数包括水平位移增量、垂向位移增量、ADCP相对于重块的水平位移和绳子倾角。位移增量反映ADCP在其观测深度范围内的运动状况。绳子倾角反映水平位移和垂向位移的比例,其中水平位移越大,倾角越大。
如图2所示,潜标ADCP位移增量可通过下式计算:
(9)
Dr(t)=max[D(t)]-min[D(t)]
(10)
dy(t)=D(t)-min[D(t)]
(11)
式中:dx(t)表示水平位移增量,单位为m;Dr(t)表示深度范围,单位为m;D(t)表示某时刻观测深度,单位为m;min[D(t)]表示最小观测深度,max[D(t)]表示最大观测深度,单位为m;dy(t)为ADCP的垂向位移增量,单位为m。从公式(9)可以看出,dx(t)随着dy(t)的增大而减小。当D(t)=max[D(t)]时,在公式(11)中dy(t)达到最大值Dr(t),在公式(9)中 dx(t) 达到最小值0;当D(t)=min[D(t)]时,在公式(11)中dy(t)达到最小值0,在公式(9)中dx(t)达到最大值Dr(t)。垂直状态下,潜标ADCP深度与最小观测深度min[D(t)] 相等。
台风期间某一时刻仪器的垂向位移计算公式如下
Svm(t)=Ln+dy(t)
(12)
式中:Ln为垂直状态下ADCP到重块的距离,为常数,单位为m。
潜标上重块附近绳子倾角θ(t)的计算公式为
(13)
式中:Shm(t)为潜标的水平位移,单位为m。
2.2.2 潜标上流速误差和校正
潜标上的ADCP产生水平和垂向位移,导致流速测值在水平和垂直方向产生误差。潜标上ADCP的水平速度误差为
Uhm(t)=dShm(t)/dt
(14)
(15)
式中:Shm(t)为ADCP相对于重块的水平位移。
潜标上ADCP水平流速校正公式为
urm(t,z)=uom(t,z)+Uhm(t)sinθom(t)
(16)
vrm(t,z)=vom(t,z)+Uhm(t)cosθom(t)
(17)
式中:urm和vrm分别为纬向流速和经向流速校正值;uom和vom分别为纬向流速和经向流速测值;θom为ADCP测得的第一层流速的方向,正北方向为零。
潜标上ADCP的垂向移速为其垂向流速误差w′m,表达式如下
w′m(t)=dD(t)/dt
(18)
潜标上垂向流速的校正值wrm表达式如下
wrm=wom+w′m
(19)
式中:wom为ADCP垂向流速测值,单位为m/s。

图2 垂直状态(a)及非垂直状态(b)下潜标系统上ADCP的空间变化Fig.2 Spatial variation of ADCP on mooring system in vertical stage (a) and non-vertical stage (b)
2.2.3 潜标上ADCP的倾斜误差
图3所示为ADCP的结构和角度变化。如图所示,ADCP换能器发出声波的厚度由几十个深度单元组成,这个厚度称为厚层(Bin),为设定常数,单位为m。当ADCP向下(上)观测时,观测剖面等于观测深度和厚层的和(差)。换能器与声波之间有一段距离没有声波覆盖,这段距离称为盲区(Blank),为设定常数,单位为m。设定的盲区越大,ADCP换能器离测量水柱的距离越大,因此其测得的数据精度越高。ADCP 在测流的过程中会发生倾斜,影响其厚层在垂向上的投影,进而影响数据质量。倾斜校正是厚层投影到垂向上的过程,即对厚层Bin的校正,校正公式如下
Bin′(t)=Bincosθt(t)
(20)
式中:θt是ADCP倾角,Bin′是校正厚层。倾角θt的计算公式[19]为
θt(t)=sin-1[sinθp(t)sinθr(t)]
(21)
式中:纵摇(θp)是朝向在Y-Z面上的夹角(俯仰角),横摇(θr)是朝向在X-Z面上的夹角(横滚角)(图3b)。由于换能器与主体成20°的夹角,因此当θp和θr大于20°时,认为ADCP测值无效。

图3 ADCP的结构(a)与纵摇和横摇(b)Fig.3 The structure (a), pitch and roll (b) of ADCP
3 台风期间ADCP数据处理结果
3.1 浮标ADCP数据的处理结果
3.1.1 ADCP的水平位移
浮标上ADCP的水平位移会给ADCP数据带来误差。图4为台风前后浮标的水平运动轨迹。浮标均围绕重块P(0,0)运动,其中1号浮标的轨迹形成2个小圆形(图4a),2号~4号浮标的轨迹则形成1个大圆形(图4b~4d)。有两种方法可以确定重块的经纬度。第一种传统方法是以表1中站位的布放经纬度作为重块的经纬度;第二种方法是以GPS所测经度和纬度的中值作为重块的经纬度,这种方法称为中值法。采用传统方法结合公式(1~3)算出的1~4号浮标的最大水平位移(也称为水平位移半径)分别为4.9、6.3、5.88 和5.69 km,均超出了浮标挂绳的总长度4.5 km。由中值法结合公式(1)计算的最大水平位移半径分别为3.12、2.58、2.61和2.47 km,处于浮标总长度的范围内,因此中值法计算的最大水平位移更切合实际。
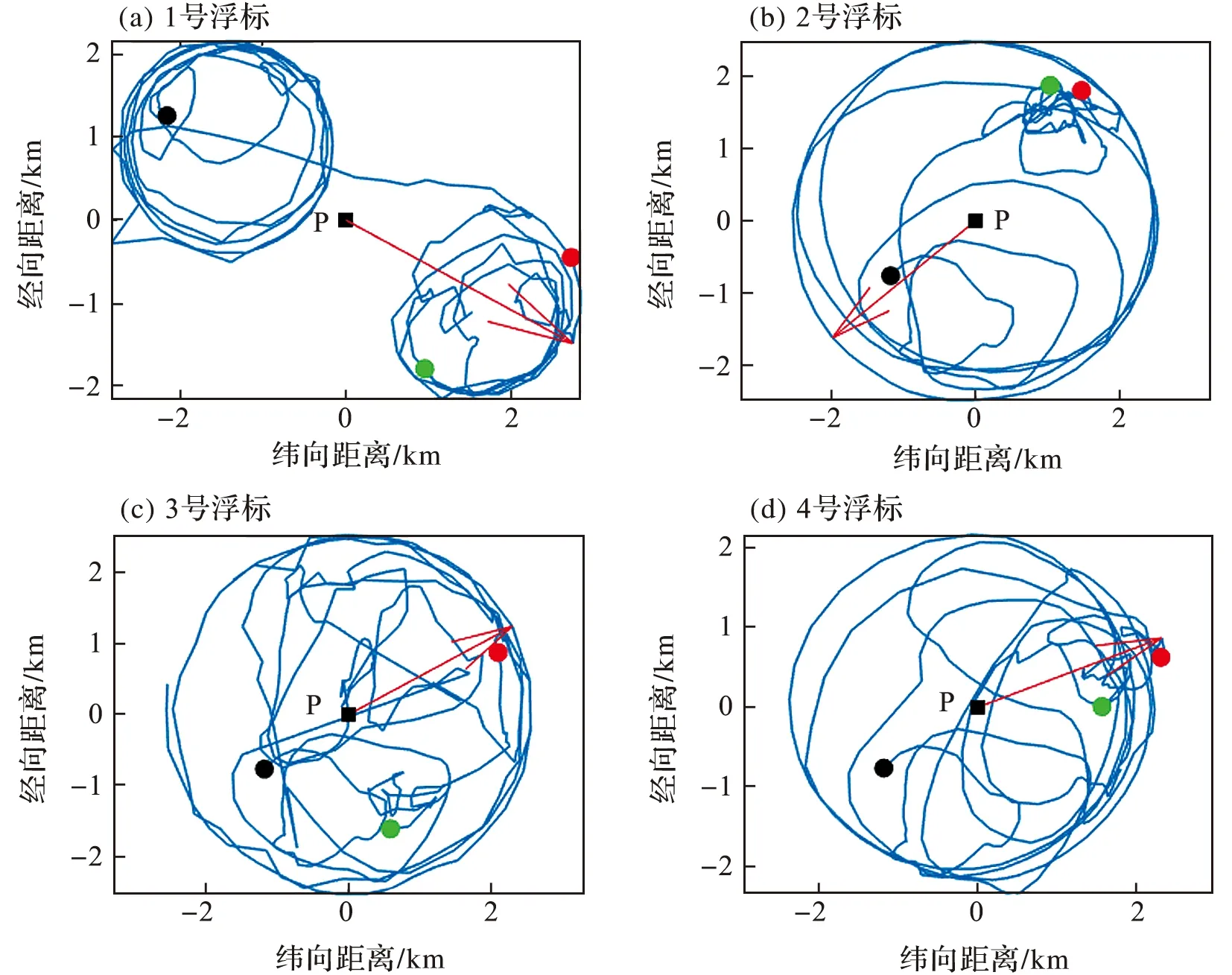
图4 各浮标的水平位移Fig.4 Horizontal displacements of each buoy
3.1.2 ADCP的水平流速误差以及水平校正
图5所示为浮标的水平移速,即ADCP的水平流速误差。由图可知,1号浮标水平流速的误差在台风前后都有周期性的变化。1~4号浮标上ADCP对应的水平流速误差最大值分别为0.20、0.27、0.21和 0.22 m/s。如图5b~5d所示,2~3号浮标的水平流速误差在台风过后的几天内均表现为大约1.5 d的近惯性周期运动,这反映了台风引起的近惯性流对浮标的推动作用。
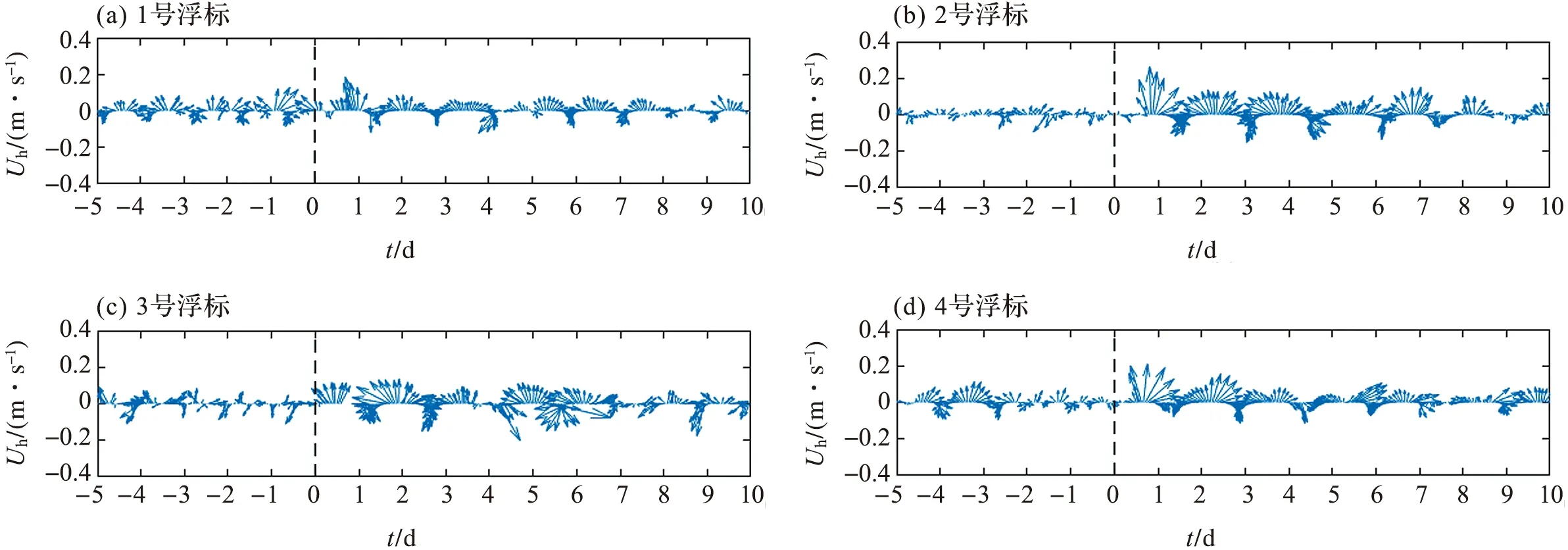
图5 各浮标上ADCP的水平流速误差矢量Fig.5 Horizontal velocity bias vectors of ADCP on each buoy
以2号浮标为例,比较水平校正前后浮标ADCP的水平流速。如图6所示,台风前,ADCP流速的水平校正值和测值差别不大。台风后,混合层(0~50 m)的流速水平校正值稍微大于测值,而温跃层(100~280 m)流速水平校正值显著大于测值(图6b中黑色方框内的流速),这表明在台风过后对ADCP温跃层流速的水平校正非常有必要。

图6 2号浮标在混合层(a)和温跃层(b) ADCP水平流速的测值和校正值Fig.6 Observed value and correction value of horizontal speed in mixed layer (a) and thermocline (b) of ADCP on Buoy 2
3.1.3 浮标ADCP的垂向变化
台风后,各浮标处的最大波高显著增大,浮标上ADCP会有10余米的垂向位移。以1号浮标和3号浮标为例,台风后最大波高分别为18 m和 14 m,大约4 d后波高衰减成台风前的状态(图7a和7b)。垂向流速的误差如图7c和7d所示,在台风过后的1 d内,随着波高迅速增长,流速误差为正,但最大值仅为 5×10-4m/s;之后,随着波高逐渐降低,流速误差减小为负值,台风过去后4 d左右误差恢复至台风来之前的状态。4 d后的波高再增长来自后续热带气旋凤凰(1416)的影响,这里不再讨论。

图7 1号浮标和3号浮标处测量的最大波高及ADCP垂向流速误差Fig.7 Maximum wave height and vertical current velocity bias of ADCP on Buoy 1 and Buoy 3
3.2 潜标ADCP数据的处理结果
3.2.1 ADCP的空间变化
图8是潜标上ADCP的空间参数随时间的变化过程。1~4 号潜标上ADCP的垂向位移增量(dy)的最大值分别为32、179、133和152 m,ADCP相对于重块的水平位移(Shm)的最大值分别为916、1 501、1 332 和 1 354 m,绳子倾角(θ)的最大值分别为35°、24°、21°和22°。1号潜标上ADCP的水平位移增量在台风前2 d开始增大(图8a),垂向位移增量开始减小(图8b)。2~4 号潜标上ADCP的水平位移增量在台风过后开始减小(图8e、8i和8m),垂向位移增量开始增大(图8f、8j和8n)。1号潜标上ADCP的位移增量较小是因为其观测水深随时间的变化幅度较小。2号潜标上ADCP的位移增量较大是因为其离台风中心较近。

图8 各潜标上75 kHz ADCPs的空间参数Fig.8 Spatial parameters of 75 kHz ADCPs on each mooring
3.2.2 ADCP的水平流速误差
潜标上ADCP水平流速误差来自ADCP的水平移动。如图9所示,台风前后潜标上ADCP的水平流速误差变化不大,1~4 号潜标的水平流速误差的平均值和标准差分别为0.001±0.001、0.006±0.005、0.006±0.006和0.006±0.006 m/s。由于潜标上ADCP的水平流速误差相对于ADCP测值较小,因此这里不进行水平流速校正。

图9 各潜标上ADCP的水平流速误差Fig.9 Horizontal velocity bias of ADCPs on each mooring(正值/负值表示ADCP做远离/靠近重块运动。)(The positive/negative values represent that the ADCPs move away from/close to the concrete block.)
3.2.3 ADCP的垂向流速误差以及垂向校正
图10为2号潜标上ADCP的垂向流速误差以及垂向流速的校正值和测值。如图10a和10b所示,ADCP垂向流速误差的振幅在台风过后有轻微的增大,由于300 kHz ADCP和75 kHz ADCP安放位置相近且都在潜标上,因此垂向流速误差振幅接近。由于300 kHz ADCP观测的水层范围为温跃层 200~300 m,其垂向流速测值比垂向流速误差大一个数量级(图10c),因此垂向校正后的流速与测值差别不大;75 kHz ADCP所测的水层范围为中层300~800 m,其垂向流速测值与垂向流速误差量级相同,因此垂向校正后的流速在台风过后的几天内显著增大,这说明垂向校正对中层流速的作用不可忽略。

图10 2号潜标上300 kHz和75 kHz ADCP的垂向流速误差、测值和校正值Fig.10 Vertical velocity bias, observed value and correction value of 300 kHz ADCP and 75 kHz ADCP on Mooring 2
3.2.4 ADCP的倾斜误差
如图11a所示,台风过后ADCP的纵摇和横摇增大。由于纵摇和横摇变化的幅度较小(变化范围在-5°~5°之间),因此由公式(21)计算的 ADCP 倾角的量级更小(变化范围在-0.1°~0.1°之间,图11 b),再由公式(20)可知,ADCP倾角对厚层的影响非常小,因此ADCP倾斜校正对数据的影响可以忽略。

图11 2号潜标上300 kHz ADCP的纵摇、横摇和倾角Fig.11 The pitch, roll and tilt angle of 300 kHz ADCP on Mooring 2
4 结论
本文基于2014年9月台风海鸥期间,南海北部的浮标和潜标上的声学多普勒流速剖面仪(ADCP)数据,提出了一套几何算法来计算台风过程中 ADCP 空间变化,并进行了误差分析以及相关的数据校正。计算结果显示:(1)浮标上ADCP水平位移可达 2.61 km,水平流速误差可达0.27 m/s,并在离台风较近的站位中出现近惯性振荡的信号;水平校正计算后发现,在台风过后的几天内混合层的流速变化不显著,而温跃层流速的水平校正值显著大于其测值;由于波浪的作用,浮标上ADCP的垂向位移可达10余米,但垂向流速误差较小,最大仅为5×10-4m/s,在垂向流速校正中可忽略。(2)台风导致潜标上ADCP的最大水平位移可达1.5 km,绳子倾角可达35°,ADCP 最大垂向位移可达179 m,由于近惯性波的作用ADCP空间参数具有近惯性 ;校正计算发现,潜标上ADCP的水平流速误差和倾斜误差均较小,可忽略不计,但垂向校正对台风过后几天内中层流速的作用不能忽略。
本文提出的ADCP数据质量控制方案能有效减小观测误差,更准确地反映海洋流场在极端情形(如台风期间)下的变化,可为更好地研究海洋变化过程服务。
猜你喜欢
环球时报(2022-09-07)2022-09-07
垂钓(2022年3期)2022-05-14
垂钓(2022年1期)2022-02-09
舰船电子工程(2021年5期)2021-06-04
国学(2020年1期)2020-06-29
小读者(2020年4期)2020-06-16
垂钓(2019年2期)2019-09-10
中国医学影像学杂志(2018年9期)2018-10-17
摄影之友(影像视觉)(2017年10期)2017-11-07
摄影之友(影像视觉)(2017年1期)2017-07-18
