
基于空气介质的光学溶解氧传感器便捷校准方法研究
2022-04-06 10:42张颖颖张云燕吴丙伟冯现东
海洋学研究 2022年1期
高 顺,张颖颖*,2,3,袁 达,2,3,张云燕,2,3,吴丙伟,2,3,冯现东,2,3
(1.齐鲁工业大学(山东省科学院)海洋仪器仪表研究所,山东 青岛 266061; 2.山东省海洋监测仪器装备技术重点实验室,山东 青岛 266061; 3.国家海洋监测设备工程技术研究中心,山东 青岛 266061)
0 引言
溶解氧是衡量海水水质状况、评估海洋生态环境的主要指标,也是海洋科学实验和资源勘探的重要依据,具有非常重要的观测价值和研究意义[1]。海水中溶解氧浓度的基准测量方法是实验室的Winkler滴定法,随着海洋生态环境监测技术的发展和对溶解氧长期原位监测的需求,一系列溶解氧传感器应运而生,这些传感器在精度、响应时间等方面逐渐满足海洋观测任务的要求[2-4]。基于荧光猝灭原理的光学溶解氧传感器因具有维护周期长、可以获得长期连续观测数据等优势而被广泛应用[5-7]。
但是,光学溶解氧传感器在定标后至投放前的贮存期内和监测应用的过程中不可避免地会发生“贮存漂移”和“测量漂移”,例如,目前比较成熟的安德拉传感器灵敏度每年下降约4%~5%[8-10]。安装于无人值守的Argo、滑翔机等平台上的传感器,每年哪怕只有十分之几的数据漂移也会严重影响海-气氧通量的准确估算[11]。因此,在溶解氧传感器布放期内如何保证其测量准确度变得非常重要。
目前对于溶解氧传感器的校准方法仅有实验室方法,主要包括两点校准法和多点校准法[12]。两点校准法通过测量传感器在无氧水和100%溶解氧饱和水中的漂移数据,建立两点校准模型直接修正溶解氧浓度漂移[12]。该方法简单,应用相对广泛。多点校准法通过选取多个温度点,每个温度点选取不同的浓度梯度,重新建立漂移溶解氧传感器的相位偏差,温度、溶解氧浓度之间的非线性关系[13]。此方法校准精度高,缺点是该方法实际是一个重新标定的过程,步骤繁琐、需要消耗大量时间,操作人员需要经过专业培训。不论采用上述哪种校准方法,目前都只能将传感器取回实验室进行人工校准,费时费力,维护周期短、成本高,且影响监测数据的连续性。对于需要长期稳定、准确、可靠的溶解氧测量数据的浮标、潜标、滑翔机器等无人值守观测平台而言,如何快速校正溶解氧传感器是亟待解决的难题[14]。因此,迫切需要开展溶解氧传感器现场校准方法的研究,建立便捷的溶解氧传感器现场校准模型,从而提升海水溶解氧的监测数据质量和数据连续性,以满足当前海洋环境监测的需要。
本文在传统两点溶液校准方法的基础上,针对海上无人值守平台上很难创造100%饱和度的水体环境用于光学溶解氧传感器校准和不同温度下光学溶解氧传感器在不同介质中响应特性不同等问题,开展基于空气介质的光学溶解氧传感器现场校准方法研究。
1 材料和方法
本文首先根据光学溶解氧传感器在空气和水体这两种不同介质中表现出不同响应特性规律的问题,研究建立不同温度下溶解氧传感器在空气中的响应特性模型,修正溶解氧传感器通过空气介质校准存在的系统误差,之后利用空气介质校准实验获得的数据,建立基于空气介质的光学溶解氧传感器两点校准模型,实现海上无人值守平台上光学溶解氧传感器的现场校正。
1.1 仪器设备
本研究使用的仪器设备共4种。采用挪威安德拉公司生产的AANDERAA 4531型溶解氧传感器读取密封压力反应罐内空气介质的温度和氧气浓度测量值,该传感器测量准确度为5%或<8 μmol·L-1,经过国家海洋标准计量中心的计量检定[15]。采用美国海鸟公司生产的SeaBird SBE39温度传感器监测密封压力反应罐内温度变化状况,其准确度为 ±0.002 ℃。采用中国速迅电子科技有限公司生产的压力传感器监测密封罐体内的压力,其准确度为 0.5%FS。采用中国宁波新芝生物科技股份有限公司生产的恒温水槽用于控制水浴和密封罐内气体温度,其控温精度为±0.01 ℃。
1.2 校准实验装置
本文设计加工的现场校准实验装置如图1所示。现场校准实验装置的主体是密封的压力反应罐,采用不锈钢材质制作,可以在保证强度的情况下保持良好的导热性。设计校准实验装置体积适宜,既能容纳所有传感器,又能有效完成密封压力反应罐内外的能量交换。底部设计成碗状结构以保证罐内实验用水排放完全,减少残存水体对实验结果的影响。实验装置预留接口,方便空气和水体的进出。为防止装置内部压力过大,通过流量质量控制器控制气体流速,以保持装置内部和外部大气压基本处于平衡状态。恒温水槽利用Proportion Integral Differential(PID)控制系统调节水槽水体的温度,从而控制罐内空气的温度变化。由于安德拉光学溶解氧传感器在空气环境中的响应速度变缓,实验过程中,通过SeaBird SBE39温度传感器监测罐内温度变化情况作为温度调节参考值,罐内布放的安德拉光学溶解氧传感器示数进入稳定状态后再进行数据读取。

注:1—计算机终端;2—传感器线缆;3—密封压力反应罐;4—SeaBird高精度温度传感器;5—光学溶解氧传感器;6,9—塑胶水管;7,8,10,11,12—流量质量控制器;13—导气管;14—压力传感器;15—纯净饱和空气瓶;16—高精度恒温水槽;17—水;18—纯净氮气瓶图1 校准装置结构Fig.1 Structure of calibration device
1.3 空气介质响应特性实验
根据光学溶解氧传感器实际部署的环境温度和实验条件,选定3~30 ℃作为考察的温度范围。首先设定恒温水浴温度为3 ℃,用饱和空气压出密封压力反应罐内的所有水体并持续一定时间后,封闭排水管,将所有流量质量控制器关闭,打开排气管,排出过量气体,保持内外压平衡,之后封闭排气管,创造出一个较为理想的密闭实验环境。通过水浴使密封压力反应罐的内外温度逐渐趋于稳定[16]。待光学溶解氧传感器的温度读数稳定在±0.01 ℃,且氧气浓度持续稳定5 min后,记录密封压力反应罐内的压力、温度、湿度和氧气浓度数据。间隔3 ℃作为1个采样点,进行其他温度点的考察,1个温度点获取大约15组数据。
最终根据10个温度点下获取的压力、温度、湿度和氧气浓度数据,构建光学溶解氧传感器在空气中的响应特性曲线。其中,空气中的氧气分压根据公式(1)[17]计算,作为校准装置中氧气分压的真值:
(1)

为空气中的相对湿度;χO2为空气中氧气的摩尔分数。其中,PH2O由下式计算获得[18]:
(2)
式中:t为温度,单位:℃。
密封罐内饱和空气的氧分压单位是hPa,而传感器获取的氧气浓度单位为μmol/L,需按照安德拉传感器产品说明书中的公式(3)~(5)(1)参考安德拉传感器官方网站:https://www.aanderaa.com/oxygen-sensors。将光学溶解氧传感器获取的氧气浓度值换算为分压值:
(3)
Y=44.614×EXP(1.710 69×T5+0.978 188×T4+4.802 99×T3+3.990 63×T2+3.224×T+2.008 56)
(4)
(5)
式中:CO2是待转换的氧气浓度,单位:μmol/L;PO2是转换后的氧气分压,单位:hPa;常数C=1.05,D=-0.18。
最后,计算校准装置内氧气分压与仪器测量氧气分压的相对误差,建立相对误差与温度的公式模型,从而获得不同温度下溶解氧传感器在空气中的响应特性模型。
1.4 建立校准算法模型
将光学溶解氧传感器放置于随机温度的饱和空气中,等传感器读数稳定后记录15组温度示值和氧气浓度示值,从而获得饱和空气点的数值。再将光学溶解氧传感器放在充满氮气的密封罐内,等待传感器读数稳定后记录15组温度示值和氧气浓度示值,从而获得无氧状态下的数值。以此建立溶解氧传感器两点校准算法模型。
1.5 验证实验
研究建立光学溶解氧传感器的现场校准公式后,将光学溶解氧传感器直接放在装有纯净水的恒温水槽中,随机考察3~30 ℃范围内10个温度点的溶解氧测量值。
首先,通过恒温水槽控制水浴的温度环境,待一定的温度条件稳定后开始进行实验。利用光学溶解氧传感器实时测量水浴的温度与溶解氧浓度,待读数在0.1%内变化并持续5 min后开始采集数据。1个温度点持续实验5 min,大约采集15组溶解氧的浓度数值。同时,从传感器的光学窗口附近取水样,采用Winkler滴定法检测水样的溶解氧浓度值。完成1个温度点的实验之后,采用升温的方式进行剩余9个温度点的实验。
2 结果与讨论
2.1 建立空气介质响应模型

表1 10个温度条件下传感器在空气中的测定值与氧分压真值Tab.1 The measured value and the theoretical value at 10 temperature conditions

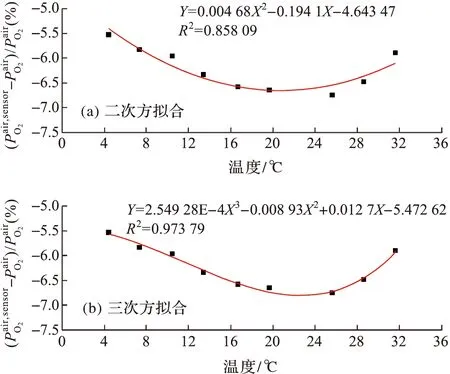
图与的相对误差与温度间的关系Fig.2 Relationship between relative error of

图与实验数据(a)和与与在不同温度下的差值(b) at different temperatures (b)
2.2 建立两点校准模型并进行实验验证

(6)
(7)
(8)

(9)
(10)
(11)


表2 校准值、仪器示值与Winkler测定值比对Tab.2 Comparison among calibration value, instrument indication value and Winkler measurement value
如图4所示,光学溶解氧传感器的校准值与Winkler 测定值的偏差在±6 μmol·L-1之内,明显低于未经校准的误差值,说明经溶解氧传感器现场校准方法校正后的传感器测量误差达到了小于等于±5%的要求。

图4 仪器示值、校准值、Winkler测定值数据对比(a)及差值对比(b~d)Fig.4 Comparison of instrument indication value, calibration value and Winkler measurement value data (a) and the difference value among them (b~d)
如图5所示,光学溶解氧传感器的校准值与Winkler测定值具有良好的一致性,线性相关性系数R2=0.999 4。校准实验结果表明,利用光学溶解氧传感器在空气和水两种介质中的不同响应特性规律,从而建立的两点校准模型和方法能够满足现场校准的要求。

图5 光学溶解氧传感器校准值与Winkler测定值线性相关性分析Fig.5 Linear correlation analysis of optical dissolved oxygen sensor calibration value and Winkler measurement value
3 结论
本文通过研究光学溶解氧传感器在水和空气中的响应规律,建立了一种基于空气介质的光学溶解氧传感器校准方法,建立两点校准模型,实现AANDERAA 4531型溶解氧传感器的现场便捷校正。通过实验验证,校正后的传感器数据误差在±6 μmol·L-1以内,满足数据误差小于等于±5%的使用要求。本研究建立的现场校准方法使用简单便捷,可以免去将传感器从海上平台取回实验室进行校准的繁琐步骤,降低了传感器的后期维护成本,能够有效提高溶解氧传感器的长期监测数据质量和数据连续性。该方法具有通用性,理论上适用于所有光学溶解氧传感器数据校准,在浮标、潜标、glider等多种无人值守自主观测平台上具有广阔的应用前景。
猜你喜欢
中学生数理化·中考版(2022年9期)2022-10-25
初中生学习指导·中考版(2022年4期)2022-05-12
中学生数理化·中考版(2021年9期)2021-11-20
建材发展导向(2021年20期)2021-11-20
科技视界(2021年21期)2021-08-24
海洋通报(2021年2期)2021-07-22
中学生数理化(高中版.高考理化)(2021年5期)2021-07-16
科学与信息化(2020年11期)2020-06-19
儿童故事画报·自然探秘(2016年6期)2016-09-14
中学生数理化·中考版(2016年2期)2016-09-10
