
数据手套控制的微创手术机械臂抓钳系统设计
2022-04-02 06:12李晓虎张敏燕茅士央
生物医学工程学进展 2022年1期
李晓虎,张敏燕,茅士央
1.上海理工大学健康科学与工程学院(上海,200093)
2.上海星辰儿童医院供应链管理部(上海,201100)
0 引言
微创外科腹腔镜手术机器人技术已成为当前的腹腔镜手术领域的研究热点[1]。与传统微创手术相比,手术机器人具有定位准确、状态稳定、无抖动、工作空间范围大等优点[2],未来手术机器人的发展趋势将更加智能、轻巧、便携[3-5]。本研究设计了一种可穿戴数据手套,能实时控制腹腔镜手术机械臂,实现手术抓钳的伸缩、绕轴杆旋转、开合及腕部偏转操作。
1 系统结构与功能设计
本系统包括手术机械臂和数据手套2 部分,可以单手穿戴数据手套控制一台手术机械臂,也可双手同时穿戴2 只数据手套控制2 台手术机械臂进行协同操作。
1.1 手术机械臂结构与功能设计
手术机械臂包括主体和抓钳两个部分,如图1所示。主体关节由电机0、1、2、3 驱动,并可围绕轴线R0、R1、R2、R3、R4转动;抓钳可完成伸缩、绕轴杆旋转、腕部偏转、开合4 个动作[6];电机4带动轴杆沿轴线R4旋转±135°;电机5 转动拉动刚性绳从而带动抓钳腕部沿轴线R5做±80°俯仰运动;电机6 转动拉动刚性绳从而带动钳爪沿轴线R6开合,最大张角K6为80°;电机7 通过齿轮齿条传动机构带动抓钳沿M7方向伸缩,伸缩范围±20 mm。

图1 手术机械臂结构Fig.1 Surgical robotic arm structure
1.2 数据手套结构与功能设计
本项目设计的数据手套与实物如图2 所示。使用时用手掌托住数据手套主体,四指可伸入指环,每个指环各与1 个摇杆电位器4 固连,手掌部位安装陀螺仪2 和无线模块3,大臂和小臂上的倾角传感器1 通过腕带固定。
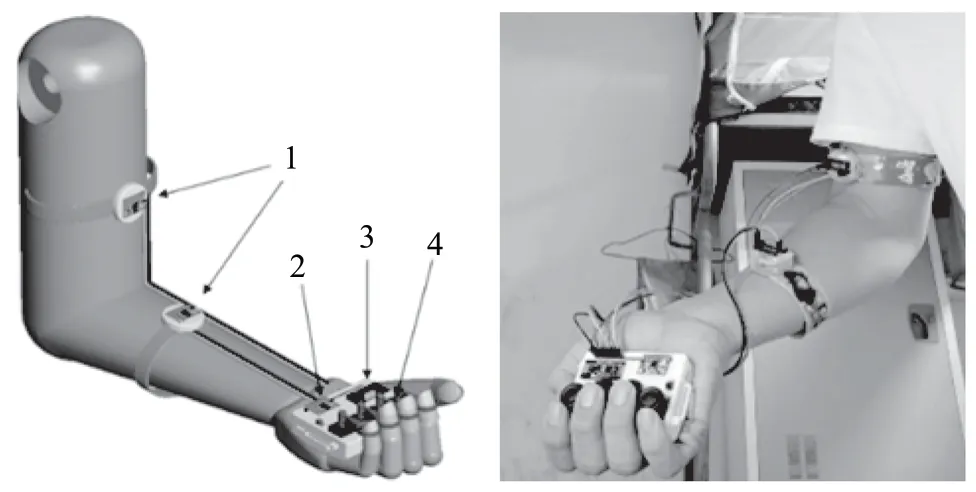
图2 数据手套结构Fig.2 Data glove structure
2 数据手套人机交互实时控制
2.1 系统控制方案设计
系统总体设计如图3 所示。摇杆电位器采集手指弯曲数据,控制抓钳驱动电机实现对抓钳的动作控制;倾角传感器ADXL345 采集大臂、小臂运动过程中x轴的倾角;MPU6050 六轴陀螺仪、三轴磁力计采集手掌姿态数据;数据手套的主控芯片STM32 单片机处理数据并通过无线收发模块将数据发送至手术机械臂;手术机械臂的STC15 单片机接收、处理数据,获得手臂的空间位置和姿态数据,控制手术机械臂电机,同时处理摇杆电位器的采样数据,控制抓钳驱动电机;显示器显示内窥镜下抓钳实际的空间位置图像,用于实时控制调整。

图3 系统总体设计框图Fig.3 System overall design block diagram
2.2 手指控制指令的采集与处理
人手的四指弯曲带动4 个摇杆电位器在±22.5°夹角范围内摆动,摇杆电位器阻值随摆动幅度角度发生变化,数据手套主控芯片检测到输入模拟电压发生变化,经过数/模转换、滤波处理后得到4 个摇杆电位器(图2 所示)的数据,通过无线模块发送至手术机械臂主控单元,控制手术抓钳的4个驱动电机(图1 中电机4-7)的转动,实现抓钳的伸缩、绕轴杆旋转、开合及腕部偏转动作。
2.3 人手到手术机械臂主体关节的运动映射
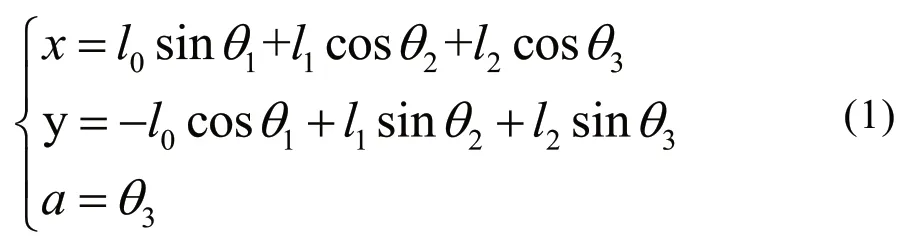
建立手臂各关节直角坐标系(见图4),大臂到小臂、小臂到手腕、手腕到手掌中心M关节间的距离分别对应手术机械臂相应关节间的实际距离l0、l1、l2。由式(1)几何关系得x0y0世界坐标系下M点空间位置(x,y),姿态角α。
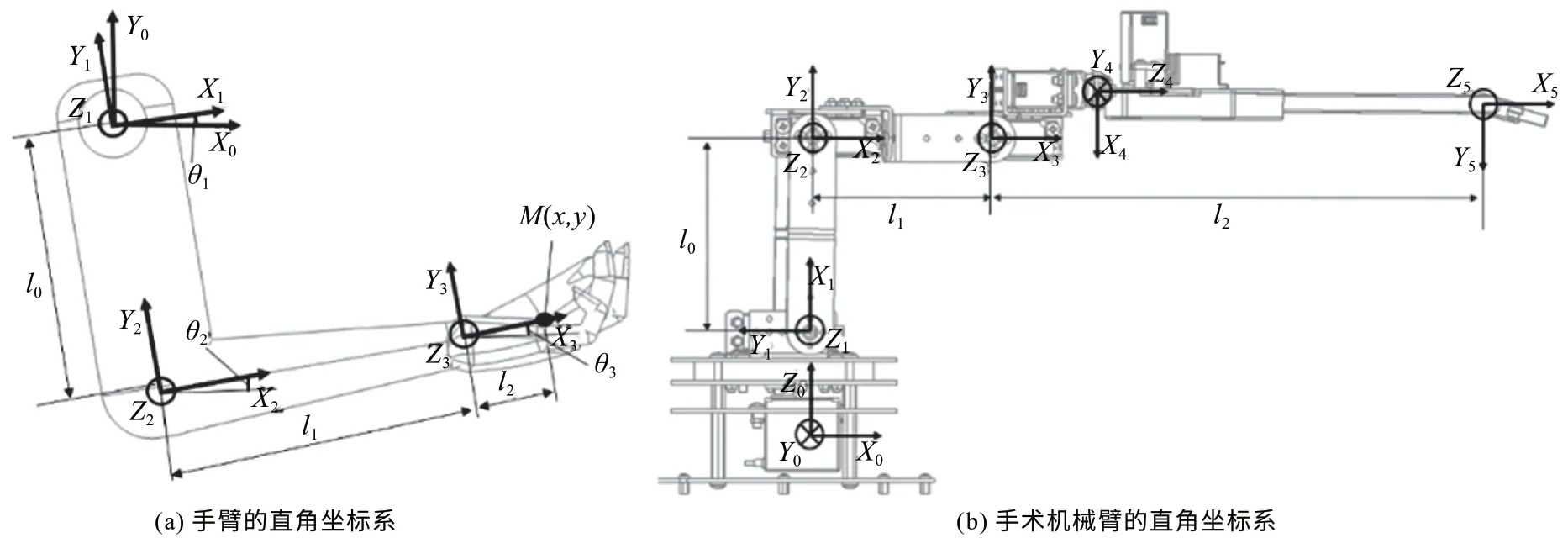
图4 手臂与机械臂的直角坐标系对应关系Fig.4 Correspondence between arm and robotic arm
对机械臂模型进行简化[7],如图5 所示。图中P为抓钳顶端位置,采用几何法的逆向运动学算法来完成对手术机械臂运动的控制。
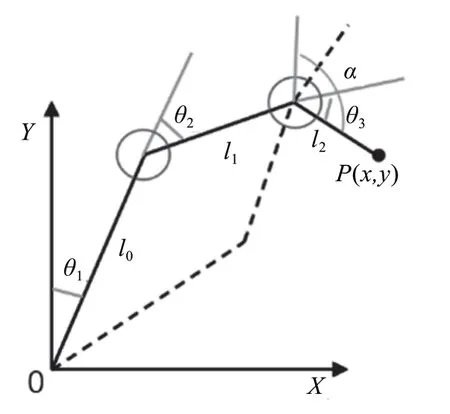
图5 手术机械臂简化几何表示Fig.5 Simplified geometric representation of surgical manipulator
根据模型几何关系得出P点坐标位置满足如下关系式:
为了便于计算,令

由式(2)、(3)化简得:

经式(4)求解得:

其中:

θ1、θ2结果取值各有两种情况,如图5 中实线和虚线,为提高动力性能,选择力臂小的实线位置。解析数据手套发送的M(x,y)坐标、姿态角α、航向角数据,通过上述计算可以得到图4(b)中手术机械臂Z1、Z2、Z3关节对应的转角θ1、θ2、θ3,手术机械臂Z0关节水平转角的对应航向角,建立起人手到手术机械臂主体关节的映射关系[8]。
3 操控实时性测试
数据手套主控单元的定时器记录手部单组控制指令的采集和处理时间,当8 个电机运行到各目标角度后结束计时,向PC 串口发送计时和电机转动过程中随时间变化的角度信息。测试结果如图6所示。通过10 次测试取均值,经数据手套采集处理手部单组控制指令、手术机械臂解析处理数据,过程耗时约70 ms。8 个电机从初始角度转动到各目标角度平均响应时间460 ms,总平均响应时间530 ms。由此验证控制系统的实时性,且8 个电机控制运行过程中同步匀速转动、动作连贯、平稳性好。
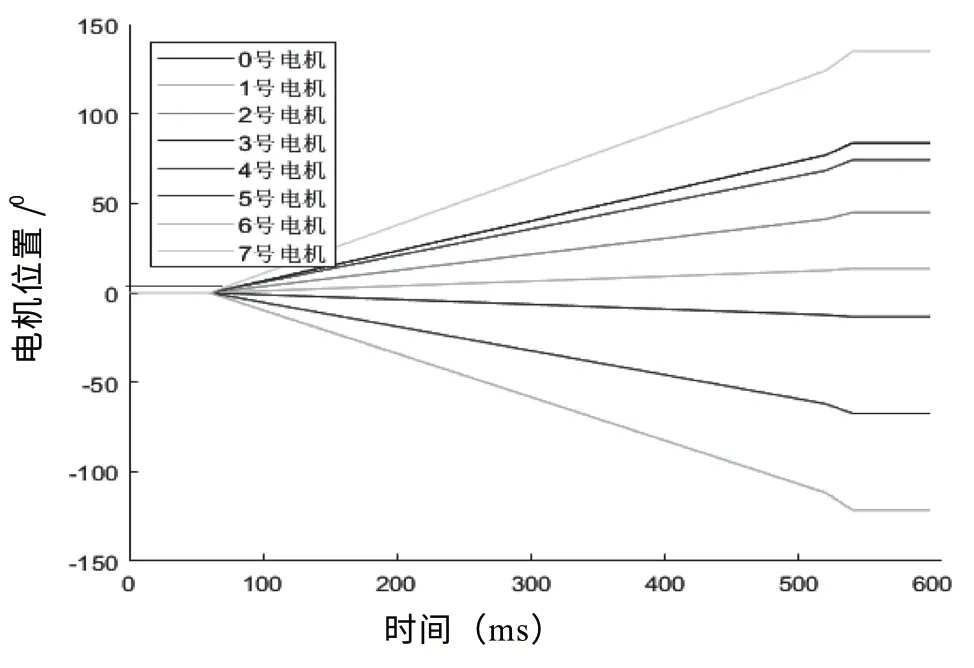
图6 电机位置随时间变化的情况Fig.6 Motor position changes over time
4 结语
本研究设计了一种灵巧、低成本实时控制腹腔镜手术机械臂数据手套,提供数据手套对手术机械臂的实时控制。实验结果表明,手术机械臂抓钳可以快速响应数据手套发送的控制指令,具有实时性、灵活性,对数据手套控制手术机械臂的方法研究有一定的参考价值。
本研究尚处于初步探索阶段,控制精度需进一步提高,可增加切换控制多台适配不同手术器械的手术机械臂,增加显示屏显示操控信息、力反馈[9-10]等功能,更好地提升人机交互体验。
猜你喜欢
包装与食品机械(2021年5期)2021-11-06
家庭百事通·健康一点通(2020年11期)2020-11-30
科学技术创新(2020年1期)2020-03-26
World Journal of Hepatology(2019年5期)2019-06-20
中国新技术新产品(2017年1期)2017-01-20
中国信息技术教育(2016年23期)2017-01-03
科学与财富(2016年28期)2016-10-14
现代电子技术(2015年5期)2015-03-31
哈尔滨理工大学学报(2014年3期)2015-01-04
计算机应用文摘·触控(2006年10期)2006-11-02
