
一类二次可逆Lotka-Volterra系统的全局相图
2022-04-02 01:07:22吴泽敏李文仙
肇庆学院学报 2022年2期
邵 仪,吴泽敏,李文仙
(肇庆学院 数学与统计学院,广东 肇庆 526061)
1 预备定理
自上世纪以来,为解决Hilbert十六问题,平面多项式系统一直是常微分方定性理论和分支理论研究的热点,尤其是平面多项式系统的极限环个数问题,更是分支问题研究的重中之重.研究二次系统的扰动系统最多有多少个极限环一直是许多学者研究的热点问题之一[1-2].利用常微分方定性理论,研究系统在有限平面和无限远平面奇点的性质、极限环的存在性与位置,以及过奇点的分界线的去向等,得到系统的全局相图.通过全局相图我们可以直观了解系统的轨线走向和动力学性态,从而为进一步研究扰动系统的分支等问题提供必要的研究准备.COLAK I E等[3]研究了具有幂零中心的三次齐次哈密尔顿系统的全局相图.TIAN Y等[4]研究了关于y轴对称的四次齐次哈密尔顿系统的全局相图和分支图.但对于二次系统到底能有多少种拓扑结构互不相同的相图,至今依然是个没有完全解决的问题,需要不断的补充和完善.
本文将研究一类二次可逆Lotka-Volterra系统[1]

的全局相图,其中b为参数.利用常微分定性理论,我们将证明这是一类没有极限环的二次系统.首先我们研究系统在有限平面奇点的拓扑分类,然后研究它在无穷远点的拓扑结构,最后在Poincaré紧化盘中得到系统(1.1)有6类不同的拓扑等价相图.
令z=x+iy,则系统(1.1)可化为:

设系统(1.2)的线性近似方程为

若(xo,yo)是系统(1.2)的奇点,则线性近似方程(1.3)的系数矩阵为

为了研究系统(1.2)的拓扑全局相图,我们给出下面几个预备定理.
定理1[5]:如果线性近似方程(1.3)系数矩阵A的特征根实部非零,且不是重根,那么非线性方程(1.2)在平衡点(xo,yo)附近的轨线与它的线性近似方程(1.3)在原点附近的轨线拓扑结构相同,为稳定的焦点或者结点、不稳定的焦点或结点、或鞍点.
定理2[6]:(对称原理)若原点O是系统(1.3)的中心,且系统(1.2)满足条件
P(x,-y)=-P(x,y),Q(x,-y)=Q(x,y)或P(-x,y)=P(x,y),Q(-x,y)=-Q(x,y),则原点O也是系统(1.2)的中心.
定理3[7]:具有中心的二次系统不存在极限环.
通过研究系统(1.2)在有限平面和无穷远奇点的各种类型,我们得到本文主要结论为以下定理:
定理:系统(1.2)的全局相图,有6种不同的拓扑结构.见图1至图6.
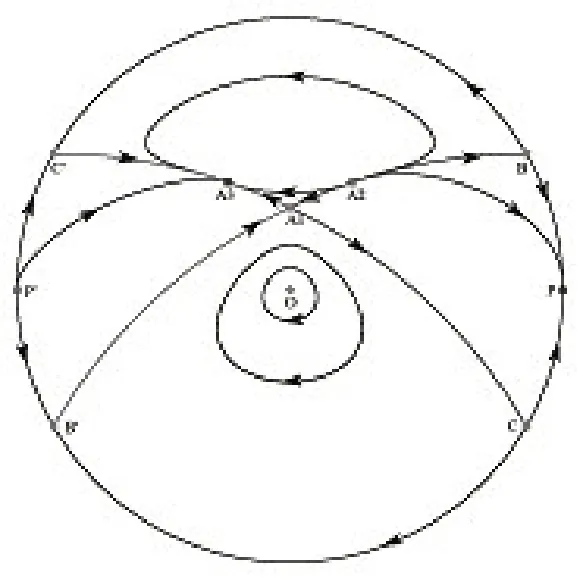
图1
(2)当b>1(或b<-1)时,在有限平面上有一个中心,三个鞍点.在右(或左)半平面y>0(或y<0)的无穷远处有一个稳定结点,两个不稳定结点,对应在左半平面y<0(或y>0)的无穷远处有一个不稳定结点,两个稳定结点,相图见图2;
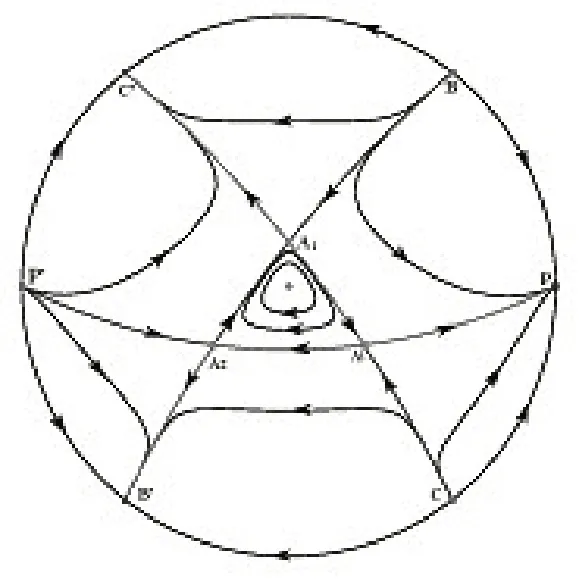
图2 b >1
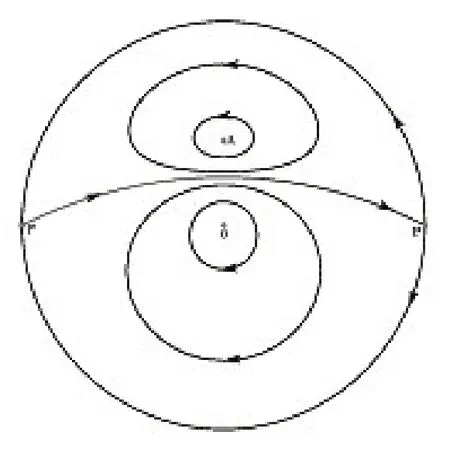
图3
(4)当b=1时,在有限平面上有一个中心,一个鞍点.在右半平面y>0 的无穷远处有一个稳定结点,两个半双曲奇点为鞍结点,在左半平面y<0 的无穷远处对应一个不稳定结点,两个鞍结点,相图见图4;
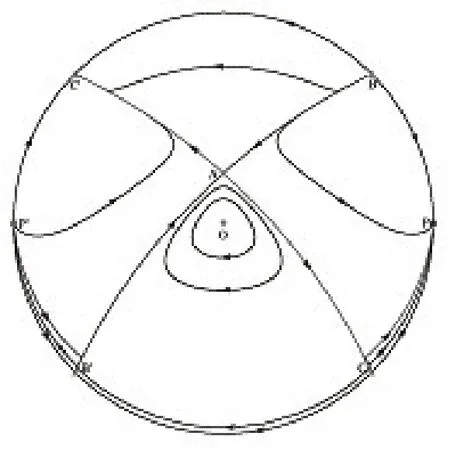
图4 b=1
(5)当b=-1时,在有限平面上只有一个中心.在右半平面y>0 的无穷远处有一个半双曲鞍点,在左半平面y<0 的无穷远处对应一个半双曲鞍点,在y轴正半轴的无穷远处有一个幂零奇点,在y轴负半轴的无穷远处对应有一个幂零奇点,相图见图5;
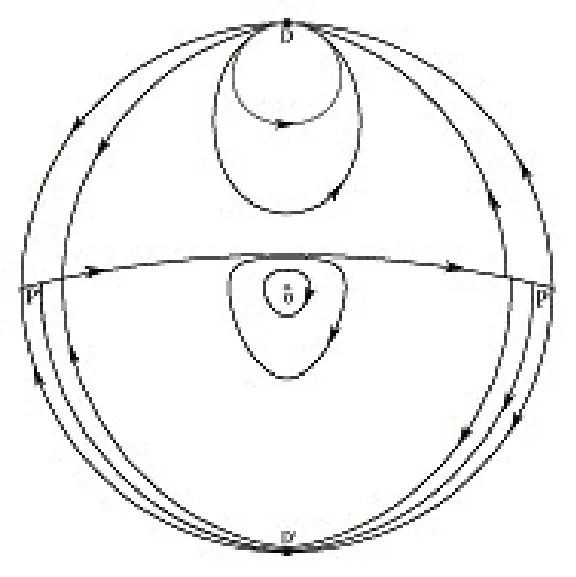
图5 b=-1
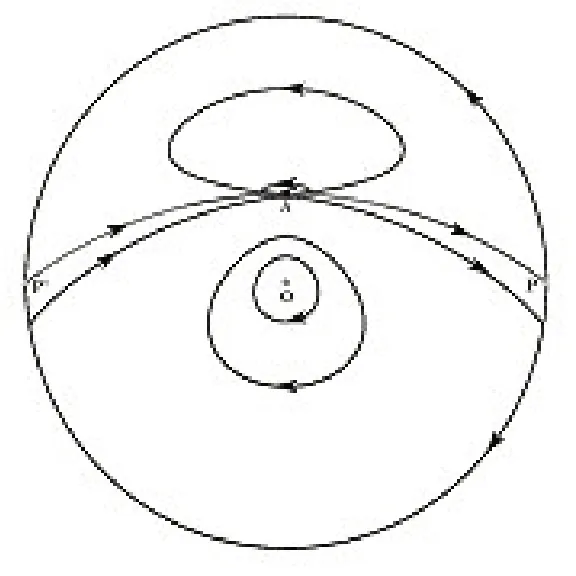
图6 b=1/3
2 有限平面奇点及性态
这部分我们主要研究系统(1.2)在有限平面的奇点类型、稳定性以及它们附近的轨线性态,为此我们有下面的引理.
引理1:在有限平面,系统(1.2)的奇点类型及性态如下:
(2)当b>1(或b<-1)时,系统也有四个奇点,分别是中心O(0,0),鞍点
(4)当b=1时,有两个奇点,分别是中心O(0,0)和鞍点
(5)当b=-1时,仅有一个奇点O(0,0)是中心;
证明:应用常微分方程定性理论,设系统(1.2)的奇点为(xo,yo),则系统(1.2)在(xo,yo)处的线性近似方程(1.3)的系数矩阵为

令系统(1.2)中的P(x,y=Q(x,y)=0,容易得到当<b<1,或b>1,或b<-1 时,系统(1.2)有四个奇点和;当时,系统(1.2)有两个奇点O(0,0)和;当b=1 时,有两个奇点O(0,0)和;当b=-1 时,系统(1.2)仅有一个奇点O(0,0);当时,有两个奇点中心O(0,0)和.
对于奇点O,易知b取任意实数,O都是系统(1.3)的奇点,系数矩阵(2.1)的特征值为i和-i,所以O是此线性近似方程(1.3)的中心.又因为系统(1.2)满足P(-x,y)=P(x,y),Q(-x,y)=-Q(x,y),所以由对称原理定理2可知,原点O也是系统(1.2)的中心.下面我们分情况讨论除O(0,0)外其他奇点的情形.
(2)当b>1或b<-1时,易求得奇点A1,A2和A3的特征值与(i)的相等,但由于的取值范围不同,所以三个奇点对应系数矩阵(2.4)的特征值均为异号实根,故奇点A1,A2和A3都是系统(1.2)的鞍点.
令ξ=x,η=则有

因为

由对称原理可知,原点是系统(2.2)的中心,故A也是原系统(1.2)的中心.
(4)当b=1 时,易求得奇点对应的系数矩阵(2.1)的特征值为λ=-+1,故A是原系统(1.2)的鞍点.
(5)当b=-1情形,只有一个中心奇点O(0,0),上述已证.

系统(1.2)化为系统

由y+P2(x,y)=0 解得隐函数
并且


由文献[8]的定理7.2及坐标变换(2.3)可知,奇点的邻域由一个椭圆扇形与一个双曲扇形组成,并且椭圆扇形在双曲扇形的上方.
这样我们就完成了系统(1.2)在有限平面上所有奇点性态的分析.
引理2:系统(1.2)是没有极限环的系统.
证明:由引理1的证明知道,不论b取何值,系统(1.2)都有一个奇点是中心O,由定理3,系统(1.2)没有极限环.
3 无限远奇点及性态
这部分我们将通过运用Poincaré变换,研究系统(1.2)在无穷远处的奇点类型以及轨线性态,为此我们有如下引理.
引理3:在无限远处,系统(1.2)的奇点性态为
(2)当b>1(或b<-1)时,系统(1.2)有三个奇点,分别是稳定(或不稳定)结点P(0,0),不稳定(或稳定)结点
(4)当b=1 时,系统有三个奇点,分别是稳定非正常结点P(0,0),半双曲的鞍结点B(1,0)和C(-1,0),B点和C点邻域的轨线由一个抛物扇形与两个双曲扇形组成,B点的抛物扇形在Poincaré圆盘内,而C点的两个双曲扇形在Poincaré圆盘内;
(5)当b=-1时,系统(1.2)有两个奇点,分别是半双曲鞍点P(0,0)以及y轴正半轴上的幂零奇点D(0,0),D的邻域的轨线由一个椭圆扇形与一个双曲扇形组成,且椭圆扇形在圆盘内,而对应y轴负半轴上的椭圆扇形不在圆盘内.
证明:我们先求系统(1.2)在x-y平面除y轴上的两个无穷远点以外的无穷远点的情况.为此作Poincaré变换,令,即,将系统(1.2)化为u-z平面上的方程组

令z=0,系统(3.1)在u轴上的奇点,即满足(1-3b)u+(b+1)u3=0.容易解出当和b<-1时,系统(3.1)在u轴上有三个奇点;当时,系统(3.1)在u轴上只有一个奇点P(0,0);当b=1时,系统(3.1)在u轴上有三个奇点P(0,0),B(1,0)和C(-1,0).
易求得系统(3.1)的线性近似方程组的系数矩阵为

(2)当b>1 或b<-1 时,奇点P,B,C的特征值与情形(i)相等.容易看出当b>1 时,P点的两个特征值为相异的负实根,B点和C点的两个特征值为相异的正实根,而当b<-1 时,奇点P,B,C的特征值与b>1 的特征值符号正好相反.因此当b>1 时,P是稳定结点、B点和C点均为不稳定结点;当b<-1 时,P是不稳定结点、B点和C点均为稳定结点.
(4)当b=1 时,易求得P(0,0)的两个特征值相等是-2,因此P是稳定非正常结点.而B点和C点的特征值为4 和0,属于高阶奇点,这种情形较为复杂.我们先讨论B点的情形.为此我们先做坐标变换u→u-1,z→z,将B点平移到u-z平面的原点,方程组(3.1)变为

为了确定高阶奇点B的类型,我们再做坐标变换

将方程组(3.3)化为

应用文献[8]的定理7.1,系统在奇点O(0,0)的充分小邻域内,解析函数ϕ(xˉ)=0 满足ϕ(xˉ)+Q2(xˉ,ϕ(xˉ))≡0.令,所以O(0,0)是鞍结点,O点邻域的轨线由分别沿着y正半轴和负半轴进入O点的两条分界线分成两部分,一部分是抛物扇形,一部分是两个双曲扇形,而且抛物扇形在xˉ-yˉ平面的右半平面.方程组(3.4)与(3.1)是拓扑等价的,故高阶奇点B也是鞍结点,其邻域的轨线拓扑等价于O点邻域的轨线性态.由坐标变换可知,xˉ-yˉ平面的右半平面对应方程组(3.1)z>0,故抛物扇形在Poincaré圆盘内.
高阶奇点C的情形与B点讨论类似,我们直接做坐标变换

方程组(3.1)变为

同时将C点平移到了原点.同样应用文献[8]的定理7.1,解析函数满足≡0,,即,即O(0,0)也是鞍结点,O点邻域的轨线分成两部分,一部分是抛物扇形,一部分是两个双曲扇形,而且两个双曲扇形在͂平面的右半平面.由于方程组(3.5)与(3.1)也是拓扑等价的,故高阶奇点C也是鞍结点,即为半双曲奇点,其邻域的轨线拓扑等价于O点邻域的轨线性态.由上述坐标变换可知,͂平面的右半平面对应方程组(3.1)z>0,故两个双曲扇形在Poincaré圆盘内.
(5)当b=-1 时,易求得P(0,0)的两个特征值为4 和0,也属于高阶奇点.与(4)中B点的讨论情形类似,不难求得坐标变换
将方程组(3.1)变为以下方程组

应用文献[8]的定理7.1,方程组(3.6)在P(0,0)的小邻域内存在解析函数满足令,即,所以P(0,0)是半双曲鞍点.

将方程组(3.1)变为方程组

由文献[8]的定理7.1,方程组(3.7)在P(0,0)的小邻域内,解析函数=0 满足ϕ(x)+Q2(x,ϕ(x))≡0.令,即m=3,am=-1 <0,所以P(0,0)是半双曲鞍点.
接下来研究y轴上的两个无穷远点.运用Poincaré变换,即,将系统(1.2)变换为ν-z平面上的方程组:

只要研究方程组(3.8)在点(v,z)=(0,0)附近的情况,就可以确定系统(1.2)在x-y平面上y轴方向的两个无穷远点的情况.
当方程组(3.8)满足(v,z)=(0,0)时,只有b=-1,这时方程组(3.8)简化为

方程组(3.9)的线性近似方程组的系数矩阵为

容易求得奇点D(0,0)处的两个特征值均为0.应用文献[8]的定理7.2,容易求得方程组(3.9)存在隐函数z=ϕ(ν)=4ν2+4ν4+O(ν6)满足z+P(ν,z)=0,并有

即

故D(0,0)的邻域轨线由一个椭圆扇形和一个双曲扇形组成,且在ν-z平面中,椭圆扇形在双曲扇形的上方.由于z>0 对应Poincaré圆盘y>0 在圆内部分,因此椭圆扇形在圆盘内.至此,我们完成了引理3的证明.
定理的证明:结合引理1和引理3,我们就证明了二次可逆Lotka-Volterra 系统ż=-iz+z2+bzˉ2在有限平面和无穷远处的奇点类型及轨线性态.综合分析就可以画出二次可逆Lotka-Volterra 系统ż= -iz+z2+bzˉ2当参数b各种取值范围的全局相图.需要注意的是b>1 和b<-1 的全局相图是拓扑等价的,我们只需要运用坐标变换(x,y,t)→(-x,-y,t),一种情形的相图就拓扑等价于另一种情形的相图.
4 结语
通过利用微分方程定性理论,对一类二次可逆Lotka-Volterra 系统在有限平面及无穷远平面的初等奇点、半双曲奇点以及幂零奇点进行了研究,得到了6类拓扑等价的全局相图.
猜你喜欢
湘潭大学自然科学学报(2022年1期)2022-04-11 11:07:42
军事文摘(2021年22期)2022-01-18 06:22:48
小学生学习指导(爆笑校园)(2021年10期)2021-11-01 08:43:58
小学生学习指导(爆笑校园)(2021年9期)2021-09-27 03:45:38
小学生学习指导(爆笑校园)(2021年4期)2021-04-29 09:34:02
军事文摘(2020年14期)2020-12-17 06:27:46
华东师范大学学报(自然科学版)(2020年1期)2020-03-16 03:14:55
上海师范大学学报·自然科学版(2018年3期)2018-05-14 13:47:10
经济数学(2017年4期)2018-01-18 17:25:55
数学物理学报(2017年3期)2017-07-01 16:18:49
