基于视差影像的规则建筑物自动检测方法
2022-04-02 08:06:50宫一鸣曹
测绘地理信息 2022年2期
宫一鸣曹 辉
1武汉大学遥感信息工程学院,湖北武汉,430079
基于遥感影像提取建筑物的理论研究最早开始于20世纪80年代,经过多年的不断发展,学者们相继提出了许多有关建筑物提取的方法[1-6]。根据数据的选用可分为两类:基于遥感影像的建筑物提取和基于点云的建筑物提取。基于遥感影像的建筑物提取例如王子明[7]结合数字表面模型(digital surface model,DSM)提出了一种基于对象和基于知识的建筑物提取方法,李百寿等[8]采用多尺度影像分割、CART决策树分类和Canny算子进行建筑物轮廓的标绘。基于点云的建筑物提取例如朱依民等[9]利用区域增长改进算法、三维Hough变换算法和α-shape算法在机载LiDAR点云数据中提取建筑物轮廓,郝明等[10]利用ISDATA算法对LiDAR数据聚类后结合高度信息、坡度信息和地物的空间关系,由粗略到精细地进行建筑物的提取。
1 视差影像自动检测建筑物方法
由于视差图包含了场景的三维信息,而场景中建筑物具有较为独特的三维突变的特点,因此研究利用视差影像进行建筑物检测和提取的基本思路是:首先将遥感影像对进行自动影像匹配处理,获取视差影像数据,然后基于视差影像数据中所能获取的场景三维信息检测建筑物的位置信息,在此基础上在原始影像中提取建筑物的轮廓信息,获得如图1的技术路线。

图1 技术流程Fig.1 Flow Chart of Technical Process
1.1 视差影像生成
首先,根据空中三角测量结果,对逐个立体像对进行核线影像纠正;并通过逐像素密集匹配,获取立体像对的视差图[11];然后对视差影像产生过程中出现的匹配误差进行修复,采用种子生长法对视差值黑色的空洞部分进行修补,得到完整的视差影像。最后通过所获取的视差影像进行实验区深度信息和视差点云数据的恢复,获取实验区三维信息。
1.2 基于视差点云的规则建筑物分类与自动检测
1.2.1体素分割
八叉树数据结构是一种广泛应用于描述三维空间结构中的一种树状数据结构[12]。对于视差影像恢复出的实验区视差点云信息,为了提高分割算法的效率和精确度,本文采用基于八叉树的区域增长算法[13],对由视差影像恢复出的实验区视差点云数据进行分割。
1.2.2体素聚类
不同的地物对光谱的反射特性不同,例如植被等地物的NDVI(normalized difference vegetation index)等植被指数可作为很好的度量,结合到本文中:体素是各阶层地物的表达对象,各体素中包含一些点云数据,其中规则建筑物的属性特征隐含在体素中包含的这些点云数据中,所以本文选取的属性特征包括3个方面,即体素中点的3种颜色的平均值(red-green-blue,RGB),以此为属性特征可以将植被等地物与建筑物很好的区分开来。由于本文实验数据的选取,每个点的RGB属性值是已经可用的。因此每个规则建筑物的RGB值可以分别用体素中所有点的平均值来表示。所以属性相似性推理的建立的综合表达式如下:

体素中点云数据的三维信息的平均值h为重要的空间特征,每个规则建筑物的深度信息可以分别用体素中所有点的平均值来表示。此外,本文在空间特征的建立中增加采用了地物的表面平滑度θ。地物的表面平滑度定义为视差点云数据中点距与这些点相适应的平面之间距离的标准差。正交距离回归(orthogonal distance regression,ODR)技术,又称为全最小二乘(total least squares,TLS),用于确定地物表面粗糙度或平滑度的误差较小,适用于各地物的表面平滑度的估算。以深度信息和地物表面平滑度为空间特征可以将围墙、汽车等地物与建筑物很好的区分开来所以空间相似性推理的建立的综合表达式为:

采用属性特征和空间特征的综合相似性推理,基于案例的推理分析法进行体素分类[14]步骤如下:
1)建立案例库:根据先验知识人工选取样本案例来建立案例库,每个案例由属性特征、空间特征和所属类别3个部分组成,,表达式为:

2)案例的推理:对于一个新的案例,给出了它的特征就可以推断其所属的地物类别,这里通过具有更高分类精度的模糊方法来进行分类,即采用隶属度F(x∈C)来表示推理的相似度,通过k最近邻算法(k-NN)来计算隶属度。
3)分类的结果:对于不同的地物类别,一个新案例可有不同的隶属度函数,由最大值来推理出其最后所属的地物类别。
基于案例的推理分析法进行体素分类,可以有效地将植被、围墙、汽车等地物与建筑物区分开来,对建筑物的分类提取精度均达到90%以上,效果与精度较为稳健。
1.2.3建筑物个体化
由于规则建筑物的视差点云数据在体素化后具有体素与体素之间的闭合性和连通性,基于属性特征和空间特征综合相似性推理后所获得的体素分类数据,在每一片规则建筑物的体素单元中随机设置一处体素单元为种子点,基于种子生长算法对体素单元的4领域中每一个体素单元进行是否属于规则建筑物的判别,并不断迭代计算聚类,直至遍历完一片规则建筑物中所有体素单元为止。在获得所有体素的聚类连接后,聚类存储这一片区域中所有连接体素,并对所有体素单元进行编号,获取各个规则建筑物的位置信息。
1.3 规则建筑物轮廓确定方法
基于所获取的建筑物的大概位置信息,返回到原始遥感影像数据中,在原始遥感影像数据的基础上,根据所得到的建筑物位置信息,采用区域增长算法提取规则建筑物的轮廓单元。
本文采用了一种中点计算方式来计算一个轮廓线和单元网格的相交点,线性插值采用与一个轮廓线相交的单元网格边的一个中点进行代替,所以该计算方法中间误差的最高值为0.5个单元边的长度,省去了插值计算的步骤。如果一个网格单元某一个网格顶点函数的估计值与阈值相等,那么这就说明轮廓线通过了这个网格顶点,需要在与此个网格顶点相连的3个单元网格顶点单元中重新搜寻并找到下一个轮廓线的网格单元,这样会明显降低整个算法的效率。所以本文采用中点算法避免这种情况的发生,该算法将函数值等于阈值的顶点归类到小于阈值的情况之中,如此0.5个单元边长就成了网格单元与轮廓线的实际交点与中点之间的最大误差。因为每一个中点有且仅有一条对应边,这样搜索下个网格单元时即可仅用在上、下、左、右4个方向上搜索,这样就避免了由于轮廓线通过网格单元顶点时造成错误的搜索路径。图2(a)给出了轮廓线通过网格单元顶点时的情况,下一个搜索单元就会有3种选择,而图2(b)用中点代替顶点,就能由中点唯一确定下一个搜索单元[15]。这样就避免了需要对原始遥感影像数据中所有单元进行处理的冗余工作,实现对建筑物的轮廓提取。
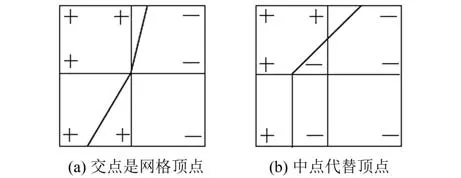
图2 中点算法Fig.2 Midpoint Algorithm
2 结果与分析
2.1 试验数据
选用的试验区域的数据为高分辨率航空影像对及其核线影像,如图3(a)所示,实验地区有以下两个特点:
1)平缓的地形。实验地区选用的是大片平坦地形,绝大部分区域地形起伏变化较为平缓,基本没有高程起伏的变化,这为利用三维信息进行地物分析提供了可行性。
2)建筑物分布较多且较为规则。试验地区中占地面积较大的是规则建筑物。建筑物形状规则,绝大部分为矩形组合的房顶规则建筑物。但房屋的附属结构比较多,且实验地区规则建筑物的周围常有树木环绕以及人工围墙的包围,会干扰规则建筑物的检测,需要结合其他地物干扰项和规则建筑物的三维信息或者光谱特征进行区分。
2.2 试验流程及结果
采用多测度半全局匹配算法可高效获取细节丰富、质量可靠的视差结果,结果如图3(b)所示。

图3 实验数据及视差影像Fig.3 Experimental Data and Parallax Images
根据视差影像信息恢复出该区域三维信息和视差点云数据如图4所示。
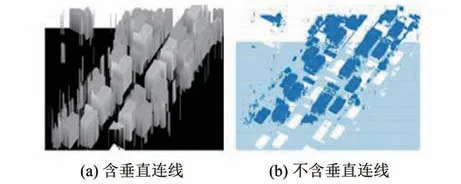
图4 视差点云恢复结果Fig.4 Result of Cloud Recovery
将所得到的实验区数据视差点云信息基于八叉树原理进行体素化处理,经过反复实验确定选择最小体素单元阈值为9,使得边界尽量清晰,结果如图5所示。
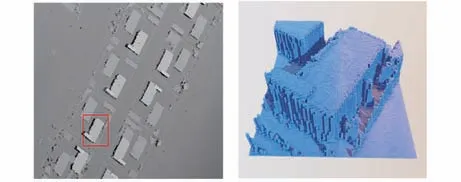
图5 体素分割结果Fig.5 The Results of Voxel Segmentation
采用传统的基于案例的推理分析法进行实验区规则建筑物的分类提取,在3 774 969个案例中,人工随机选取21 534个已知案例作为案例库,如图6所示。

图6 人工随机选取案例库Fig.6 Manual Random Selection of Case Base
基于属性特征和空间特征进行综合相似性推理,得到体素化后分类结果如图7所示。
根据混淆矩阵进行评价,综合相似性推理结果的混淆矩阵如表1所示。

表1 综合相似性推理混淆矩阵Tab.1 Synthetic Similarity Inference Confusion Matrix
由综合相似性推理后分类结果图7和混淆矩阵表1计算可得分类准确度为0.92,规则建筑物的提取精度为0.96。采用的体素化后进行基于案例的推理分析法对规则建筑物进行分类提取的实验中表现较好,该算法对规则建筑物的提取精度较高,实验样区中的规则建筑物均能较完整地分类出来实现了规则建筑物的位置信息提取,虽然由于围墙的光谱特征与三维信息均与建筑物存在较大的相似性,存在少许规则建筑物与围墙的误分情况,但本文中所采用的算法的提取精度大于90%,效果和精度仍然稳健,能够获取建筑物视差点云位置信息。

图7 综合相似性推理后分类结果Fig.7 Result of Classification After Synthetic Similarity Reasoning
分别选取个体建筑物的种子点,基于区域增长的算法对每个建筑物进行独立存储,如图8所示,不同颜色表达不同的规则建筑物个体。

图8 个体建筑物独立存储Fig.8 Individual Building Independent Storage
对所获取的所有规则建筑物的像素位置信息构成单元网格,根据基于区域增长的轮廓线提取算法,对基于视差点云数据体素化后经过综合相似性推理分类后的规则建筑物位置信息进行规则建筑物的轮廓线提取,以及进行规则建筑物提取,实验结果如图9、图10所示。

图9 规则建筑物提取结果Fig.9 Regular Building Extraction Results

图10 规则建筑物轮廓线提取结果Fig.10 Extraction Results of Regular Building Contour Lines
图9中不同颜色表达不同的规则建筑物个体,与图8中规则建筑物个体的独立存储相对应。
采用均误差、均方根误差、最大偏移3个参数指标来对规则建筑物的轮廓线提取进行精度评定。从原始影像上挑选出17个规则建筑物角点为检查点,计算轮廓精度如表2所示。
2.3 讨论
总体上来说,通过基于区域增长的规则建筑物轮廓提取方法对样区进行实验,从实验结果图9、图10中分析得出,基于区域增长法所得到的试验结果中轮廓线完整度较高和细节的描述较好,而且由于中点算法的原则,运行所用时间较少,效率有了明显的提高;从轮廓线误差评定表2中分析得出检测出的规则建筑物准确率较高,规则建筑物轮廓线提取的误差主要来自以下几个方面:
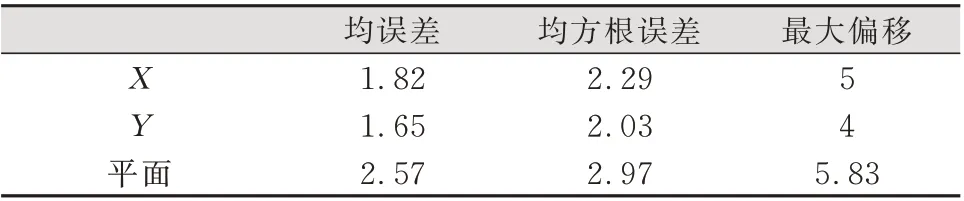
表2 轮廓线误差评定表/像素Tab.2 Profile Error Evaluation Table/pixel
1)视差点云精度的影响,视差影像的精度直接影响到基于视差影像的地物分类精度,这直接决定了基于视差点云提取出的规则建筑物初始位置并不能作为最终结果。
2)轮廓线段提取的影响,从影像上提取线段的精度影响着最终结果的精度。
3)围墙、规则建筑物的阴影等与规则建筑物相邻的物质的灰度值相近,会使得该算法得到的轮廓线出现误差,如图11所示。

图11 规则建筑物提取漏检结果Fig.11 Regular Building Extraction Miss Detection Results
此时该小型规则建筑物由于其属性特征与空间特征均与围墙类别地物相似,造成了该小型规则建筑物的漏检情况,导致后续规则建筑物轮廓提取中无法提取该小型建筑物的轮廓。可以考虑添加更加详细的形态学空间特征规则,构建相应的参数,来解决类似的漏检误检情况,这些问题将在后期的研究中加以讨论与处理。
3 结束语
为充分利用遥感影像对数据实现规则建筑物的自动检测,本文研究了在视差影像中独立分割规则建筑物,并基于此返回原始影像中对规则建筑物进行检测的方法。通过试验,验证了本文提出的基于视差影像的规则建筑物自动检测方法的有效性。试验表面,本文方法通过所获取的规则建筑物点云位置信息对规则建筑物进行轮廓提取,大大减少了其他地物对提取结果的干扰,建筑物轮廓的完整性和准确性有明显加强;采用区域增长法进行建筑物轮廓提取,选取起始种子点,通过中点算法,明显提高了计算效率;对建筑物提取结果的效果分析验证了本文算法的可行性、可靠性,同时表明了在提取较大片面积规则建筑物时,本文算法具有高质量、完整性和准确性。
猜你喜欢
计算机集成制造系统(2022年11期)2022-12-05 11:40:44
小型微型计算机系统(2022年1期)2022-01-21 02:55:06
计算机集成制造系统(2020年4期)2020-05-08 02:41:16
中国教育信息化(2019年22期)2019-12-20 07:31:26
中国惯性技术学报(2019年1期)2019-05-21 00:58:46
天津大学学报(自然科学与工程技术版)(2018年6期)2018-05-30 00:57:46
娃娃乐园·3-7岁综合智能(2016年1期)2016-10-25 09:32:48
现代计算机(2016年3期)2016-09-23 05:52:13
西部广播电视(2015年5期)2016-01-16 03:45:06
计算机工程与科学(2015年1期)2015-03-27 07:06:17