基于双传感器的云底高度测量方法研究
2022-04-02 08:06:50刘建明
测绘地理信息 2022年2期
刘建明
1山东省国土测绘院,山东 济南,250013
航空摄影是一项复杂的系统工程,需要根据天气情况多部门密切配合进行实施作业,在有云情况下,影响航空摄影的天气因素主要是云层高度[1]。云层高度信息主要反映在影像遮挡方面,如果云层较低,则导致地面信息无法获取[2]。由于云底高度判读仍以目测判读为主,估算误差大,经常出现云高估算过高,但实际低于飞行高度,造成空飞情况;也存在因云底高度估算过低,但实际高于飞行高度,造成滞飞情况,影响数据获取效率。
由于云形成原因复杂,云类型众多[3],针对云的研究主要在气象领域,包括主动探测以及被动反演等方式,其中一些研究成果与设备也广泛应用于气象观测的相关单位[4。5]。当前主要方法有目视测量、探空气球、激光测云仪、气象雷达、摄影测量等[6-8]。谭涌波等[9]提出了双站数字摄影测量云高,李国胜[10]以“一体化高速只能球型摄像机”为核心,提出摄影测量解决方案,两者都是利用摄影测量原理进行研究,同时对图像匹配特别是云图像匹配的研究较为深入[11~16],为本文研究提供参考。
由于并未考虑到航空摄影测量任务范围不固定、测定时间短等特点,所以已有研究仍具有局限性,而本文针对航空摄影实施过程中云底高度测量便捷快速的特殊性,探索出适用于航空摄影实施过程中的云底高度快速测量方案。
1 系统结构与技术流程图
1.1 系统结构
本文设计硬件部分如图1所示,传感器位于球形外壳内,旋转平台可记录垂直角度与旋转角度,底座带有对中置平装置,使用时将设备架设于已知点,首先进行单独定向观测,然后采用远程曝光装置进行两台设备同步曝光,获得独立像对。

图1 云底高测量设备结构图Fig.1 Device Structure of Cloud Bottom Height Measurement
1.2 技术流程
云底高度快速测量技术流程如图2所示。

图2 技术流程图Fig.2 Flow Chart of Technology
2 观测系统参数解算
传感器安装于旋转平台内,传感器横轴、数轴与旋转平台的横轴数轴存在一定误差,使得观测时旋转平台记录观测角度与实际传感器外方位角元素存在一定误差常数,这个常数称为安置角。
2.1 标定场建立与标志点提取
为进行安置角测定,采用圆形靶标(中心空白并带有十字丝),在某建筑物背面建立标定场,再根据要求进行拍摄。标志点均匀分布于拍摄像片内,考虑到标志数量较多且提取过程中可能存在误差,本文中将标志点提取分为粗提取与精提取两个步骤。
标志点粗提取指手动测量4个标志像点坐标,采用后方交会计算出拍摄瞬间概略姿态角,对所有物方点坐标进行计算像点坐标x、y,如图3所示,十字丝为概略像点坐标,每个点位均位于标志内。

图3 标志点粗提取成果Fig.3 Outline Extraction of Flag Points
标志点精提取指在粗提取成果下,通过指定范围,采用图像处理方式检测范围内的圆形区域,拟合出圆心坐标,如图4所示。
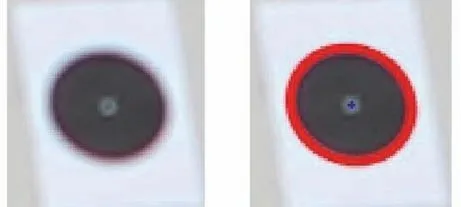
图4 标志图形与精提取结果Fig.4 Flag Image and Extraction Points
2.2 安置角测定
根据安置角定义,安置角测定采用差分方式,即实际测量值减去观测值,如式(1)所示。
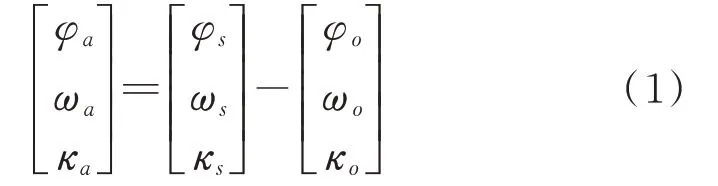
式中,φa、ωa、κa为安置角常数;φs、ωs、κs为实际测量值;φo、ωo、κo为观测值,由于云底高测量设备只有水平旋转与垂直旋转两个角度,所以κo为0。
根据后方交会结果可得出3个外方位角元素,但考虑到实际操作中,拍摄定向目标时候旋转平台旋转角置零,此时定向角度实际值φs为计算值φo与安置角误差φa的和,如式(2)所示。

而拍摄目标物时,拍摄旋转角实际值φm等于旋转角φr与安置角误差φa的和减去定向角实际值φs,如式(3)所示。

根据式(2)与式(3)得:

根据式(4)可知,由于每次定向存在安置角误差,观测目标同时存在安置角误差,两者互相抵消,最终旋转角实际值φm是旋转角φr与定向角φo的和,与安置角φa无关。
综上所述,可以获得安置角测量常数有高度角常数ωa与传感器翻滚角常数κa,本文安置角测量结果如表1所示。

表1 传感器安置角常数Tab.1 Sensor Placement Angle
3 双传感器前方交会云高测量
3.1 定向角测量
设备安装完成后,需要进行定向观测,即对准已知点进行拍摄,获取定向照片进行定向角φo计算。图5中标注的点位提前使用全站仪获取坐标,然后进行拍摄。

图5 定向角观测照片Fig.5 Initial Orientation Photo
根据空间直角坐标系的旋转变换,考虑到旋转平台与摄影测量坐标系矩阵Rt变换公式可得:
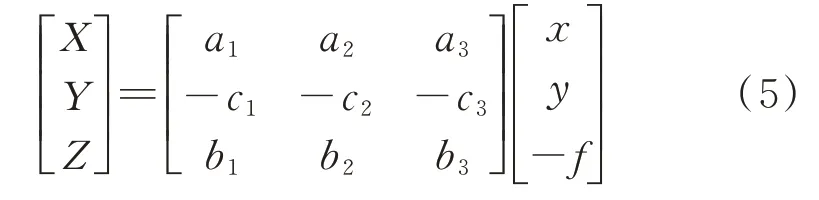
式中,X、Y、Z为定向标志点世界坐标为已知数据;x、y为标志点像点坐标为已知数据;-f为焦距为已知数据;ai、bi、ci为关于外方位元素φ、ω、κ的函数,其中ω、κ已经通过观测值与安置角计算得出,为已知数据,所以未知数就只有φ,因此,只需一个定向标志可以计算出传感器拍摄瞬间的旋转角φ。
3.2 有云图像匹配
本研究针对不同云类型制定了多种匹配方案,增加匹配成功率,同时利用双传感器姿态参数反算匹配点,剔除粗差点位,匹配结果如图6所示。

图6 朵状云匹配图Fig.6 Cumulus Image Matching
3.3 云底高度计算
传感器标定完成后内方位元素为已知数据,云底高测量系统架设已知点后量取仪器高,外方位线元素Xs、Ys、Zs计算得出,旋转平台记录旋转角相对值及高度角绝对值,定向拍摄后经过解算可以获得旋转平台初始角度,翻滚角由安置角测定得出结果,外方位角元素φ、ω、κ计算得出;经过图像匹配,像方点mi(xi,yi)为已知数据,根据共线方程前方交会原理,进行云底高度计算。
云底高计算完成后进行粗差剔除,首先反算像点坐标,然后与原始像点坐标进行对比,设定阈值像素个数,如果超过阈值认为是粗差进行剔除,否则保留为云高数据。
4 试验数据对比与误差分析
为证明本文剔除云底高度快速测量系统可用性,基于UV20-ARS无人机(unmanned qerial vehicle,UAV)航摄系统提出两种切实有效的实验方案进行验证。图7为UV20-ARS无人机的航摄系统设备。

图7 UV20-ARS航摄系统Fig.7 UV20-ARS Aerial Camera System
4.1 无人机检核实验
无人机检核实验是以无人机作为检核点,即野外放飞无人机,利用双传感器进行观测,内业人工识别无人机,利用云高计算方法计算无人机方位,并与无人机自带POS系统解算后轨迹进行对比。
本实验中未采用匹配方式进行无人机像点坐标提取,消除了匹配误差。经表2对比分析可知,本文提出方法测量得到的无人机三维坐标与无人机轨迹相近,证明本系统同步性好,能够测量不断运动变化的云。

表2 无人机检核精度统计Tab.2 UAV Verification Accuracy Statistics
4.2 无人机探云实验
无人机探云实验是利用无人机穿云时拍摄的照片判断穿云时刻,确定穿云时的位置,从而确定云低高度,再利用本系统进行有云图像获取并进行云底高度计算。通过对比验证本系统云底高测量精度,表3中是多次对两个高度层的云进行测量,求取平均数得到的结果。
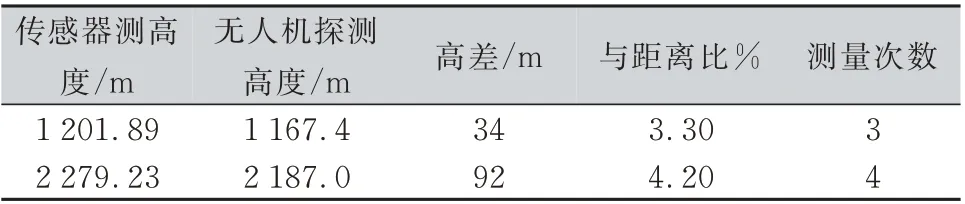
表3 无人机探云精度统计Tab.3 UAV Detection Cloud Accuracy Statistics
由于云是非规则实体,云底匹配点未必是最低点,所以最终使用全部数据进行排序,认定最低的5%数据为云底数据。
5 结束语
根据本文提出方案设计完成的云底高观测设备,其操作方法与常规测绘仪器使用方法相近,便于航摄人员相互之间应用,同时充分考虑设备便携性,不需要固定安装,仅需要少量控制点即可操作,满足设备在不同测区快速布设要求;经过实验验证,本系统在中低空云底高测量时精度优于5%,能够大幅提升云底高度观测精度。
猜你喜欢
计算机测量与控制(2024年2期)2024-02-29 04:22:22
军事文摘(2023年18期)2023-11-03 09:45:42
测控技术(2018年12期)2018-11-25 09:37:20
传感器与微系统(2018年7期)2018-08-29 00:44:24
长春师范大学学报(2018年8期)2018-08-17 12:40:20
小学生导刊(2017年13期)2017-06-15 20:29:38
测绘科学与工程(2017年1期)2017-05-04 03:40:44
太空探索(2016年7期)2016-07-10 12:10:15
太空探索(2015年8期)2015-07-18 11:04:44
计算机工程与设计(2014年9期)2014-12-23 01:16:00