
基于最小铜耗和最大转矩的双三相永磁电机单相缺相折衷容错控制*
2022-04-02 03:02:44张建亚郭玲玲张鑫彬崔业兵
飞控与探测 2022年1期
张建亚,王 凯,郭玲玲,张鑫彬,崔业兵
(1.南京航空航天大学 自动化学院· 南京·211106;2.上海航天控制技术研究所·上海·201109)
0 引 言
为确保安全性与可靠性,电机驱动系统必须具备带故障继续工作的能力。多相电机在控制上具备更多的自由度与灵活性,能够在不改变硬件结构的前提下,实现电机驱动系统的带故障运行,得到了国内外学者的广泛关注。
近年来,多相电机容错控制策略的研究大多是针对缺相故障开展的,主要分为降阶解耦矢量控制和最优电流给定控制两类。顾名思义,前者通过建立缺相后电机的数学模型,重构控制策略实现降阶矢量控制;后者则给定容错电流,并设计电流控制器以实现最优电流给定控制。由于多相电机降阶数学模型的建立非常复杂,且对不同故障位置其数学模型不同,故降阶解耦矢量控制缺乏普适性。最优电流给定控制则将对剩余各相电流的优化问题转化为方程组求解问题。为获得最优电流,附加了额外的约束条件,如镜像对称理论、基波幅值相等等。然而,上述研究更多关注容错电流的优化,一般采用电流滞环控制策略,不适合大功率场合。
文献[15]研究发现,奇数相电机缺相后若仍采用正常解耦坐标变换矩阵,则基波和谐波平面电流不再相互解耦,并提出改变谐波平面电流给定即可实现容错运行,减少了缺相前后控制框架的改变。因此,基于正常解耦坐标变换的缺相容错控制得到了广泛研究。由于多相电机单相缺相后,仍具有额外的自由度与灵活性,因此,在实现无扰运行的同时可以进一步提高容错性能。与正常运行时一致,电机驱动系统常常考虑系统铜耗和带载能力这两点,延伸而出的两种控制方式分别为最小铜耗控制和最大转矩控制。前者确保电机在缺相运行时铜耗最小,后者则保证电机缺相后的转矩最大。然而,鲜少有文献分析这两种控制方式之间的联系。
为此,本文分析了容错运行时最小铜耗和最大转矩控制方式下的容错性能,提出了基于最小铜耗与最大转矩的折衷容错控制策略。通过在谐波平面注入特定的基波平面电流分量,实现电机缺相后的无扰运行,并引入权重系数进一步提高容错性能。通过双三相电机的实验验证了所提方法不仅可以抑制缺相引起的转矩脉动,而且能够同时兼顾容错运行时的带载能力和运行效率。
1 传统容错控制策略
本文以隔离中性点的双三相永磁电机为研究对象,以C相绕组发生开路故障为例进行研究,并假设缺相前后控制框架不变。VSD坐标变换矩阵如下

(1)
通过式(1),六相电流被映射到2个相互正交的子平面,即基波平面-和谐波平面1-2

(2)
式中,、、、、和分别为A、B、C、X、Y、Z相电流;和分别为-平面电流;1和2分别为1-2平面电流。
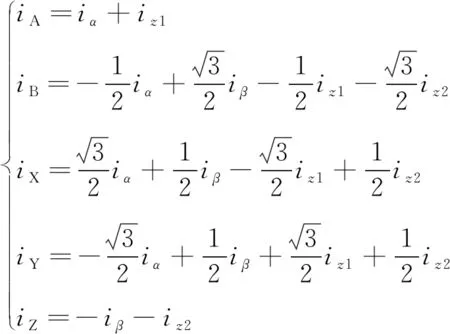
当电机正常运行时,基波平面参与机电能量转换,而谐波平面电流参考值设为0,以减小系统铜耗。然而,电机发生开路故障时,C相电流为0

(3)
由式(3)可知,缺相后基波平面与谐波平面并未解耦。为维持输出转矩不变,必须保证基波平面电流分量不变,故谐波平面电流分量可由基波平面电流分量线性表示。为实现缺相后电机的平稳运行,在1-2平面中注入基波平面电流分量
(4)
式中,、、和是基波电流注入系数。
此时,将式(3)代入式(4)可以得出
(5)
为使式(5)成立,待定系数需满足
(6)
由式(6)可知,待定系数的解不唯一。为获得最优解,通常以最小铜耗或最大转矩为原则进行优化。
1.1 最小铜耗控制方式
定子铜耗可由各平面电流分量计算得出

(7)
式中,为定子电阻。由于故障前后基波平面电流分量不变,因此缺相运行时最小铜耗原则可简化为

(8)
将式(4)和式(6)代入式(8),有


(9)

(10)
1.2 最大转矩控制方式
为保证缺相后输出转矩最大化,必须要使最大电流幅值最小,即
min
(11)
式中,=max[||,||,||,||,||]为最大电流幅值,、、、和为故障后剩余各相电流,具体表示如下
(12)
将式(4)和式(6)代入式(12),有

(13)
由式(13)可知,剩余各相电流幅值为
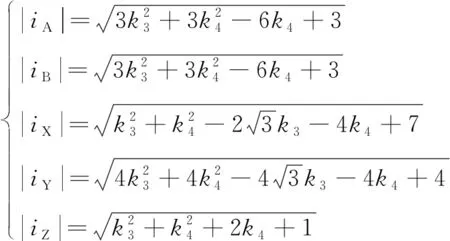
(14)
根据式(14),||=||。此时,最大电流幅值简化为




(15)


(16)
2 基于最小铜耗和最大转矩的折衷容错控制策略
由第1节分析可知,在谐波平面1-2中注入特定的基波平面电流,即可实现双三相电机的容错控制。而且,选取不同注入系数具有不同的容错控制性能。
对最小铜耗控制而言,铜耗最小,仅为正常运行时的1.5倍;但电流幅值为正常运行时的1.803倍,故带载能力为55.46%。因此,最小铜耗控制是以带载能力为代价带来效率的提高。
对最大转矩控制而言,其电流幅值最小,为正常运行时的1.732倍,带载能力为57.74%,与最小铜耗控制相比,带载能力提高了约4%。但是,最大转矩的定子铜耗为正常运行时的2倍。因此,最大转矩控制是以铜耗,也就是运行效率为代价带来带载能力的提高。
根据上述分析,传统容错控制策略难以同时兼顾带载能力与运行效率。本节以最小铜耗和最大转矩为临界点,将双三相电机的容错运行状态分为3个区间。如图1所示,区间I中的效率和带载能力均比最大转矩控制差,区间III中的效率与带载能力均比最小铜耗控制差;而区间II中的效率比最大转矩控制高,且带载能力优于最小铜耗控制,因此有必要对区间II进行研究,在提高带载能力的同时实现效率最优。

图1 双三相电机缺相容错运行状态Fig.1 Fault-tolerant operation for dual three-phase machines under open-circuited fault
与各区间对应的谐波平面1-2中注入的基波平面电流,可以用最小铜耗控制和最大转矩控制的参考电流按比例折算叠加合成
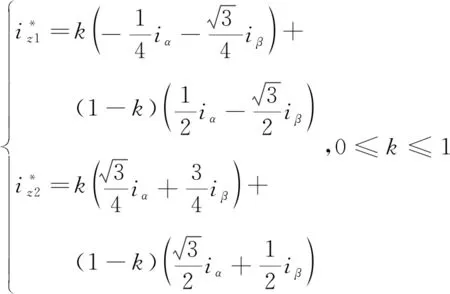
(17)
式中,为权重系数。当=0时,可简化为最大转矩控制;当=1时,可简化为最小铜耗控制。<0时,容错控制性能位于区间Ⅰ;0<<1时,容错控制性能位于区间Ⅱ;>1时,容错控制性能位于区间Ⅲ。
由式(16)可知,定子铜耗为

(18)
最大电流幅值为
=max[||,||,||,||,||]

(19)
由式(18)和式(19)可知,双三相电机单相缺相运行时,铜耗和最大电流幅值随权重系数的变化趋势如图2所示。其中,纵坐标分别以正常运行时的铜耗3和最大转矩控制的最大电流幅值1732为基准值。
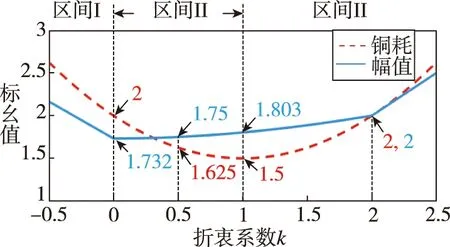
图2 双三相电机单相缺相容错控制性能随权重系数的变化趋势Fig.2 Fault-tolerant operation performance with the weight coefficient for dual three-phase machines under one phase open
由图2可知,通过改变的取值,即可实现不同容错控制性能。特别指出,当=1时,双三相电机只有XYZ三相正常工作,AB相也做开路处理。此时,运行状态等同于传统三相电机。在故障后系统仍留有余量的情况下,完全可以在0~1之间选取合适的值,实现容错运行的同时兼顾电机的运行效率与带载能力。
3 实验验证与结果分析
为验证所提容错控制策略的有效性,搭建了图3所示的双三相永磁同步电机驱动控制平台。图4所示为故障后无容错控制策略的实验结果。由图4(a)和(b)可知,故障后剩余各相电流波形严重畸变,转速稳定在500r/min,但输出转矩存在巨大的波动。-平面电流轨迹不再为圆形,无法保证转矩的平稳输出,1-2平面电流轨迹也不再受抑制,如图4(c)和(d)所示。

图3 双三相电机驱动系统实验平台Fig.3 The experiment setup for dual three-phase machine drives

(a)相电流波形
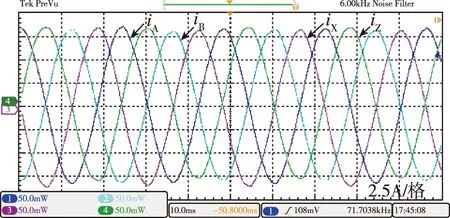
图5所示为最小铜耗控制的实验结果。由图5(a)可知,最大电流幅值约为9.3A,最小电流幅值约为4.2A。转矩维持在4Nm且未出现明显的波动,转速稳定在500r/min,如图5(b)所示。由图5(c)和(d)可知,-平面电流幅值为5A,电流轨迹为圆形;1-2平面电流轨迹为一条直线,不影响转矩的平稳输出。
(a)相电流波形
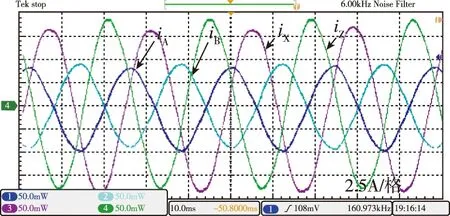
图6所示为最大转矩控制的实验结果。由图6(a)可知,相电流呈相位相差90°的对称分布,幅值约为8.6A。转矩稳定在4Nm,转速稳定在500r/min,均没有出现明显波动,如图6(b)所示。由图6(c)和(d)可知,-平面电流幅值仍为5A,电流轨迹为圆形;1-2平面电流与基波平面电流的频率和幅值相同、相位超前60°。
(a)相电流波形
图7所示为所提容错控制的实验结果,其中=05。由图7(a)可知,最大电流幅值约为9A,Y相电流(因为示波器仅有4个采样通道,故未能给出Y相电流波形)幅值最小,约为2.8A。负载转矩为4Nm,转速为500r/min,相对平稳,如图7(b)所示。由图7(c)和(d)可知,-平面电流幅值为5A,相位相差90°,电流轨迹为圆形;1-2平面电流幅值分别为3A和4A,相位相差35°,电流轨迹为椭圆形。
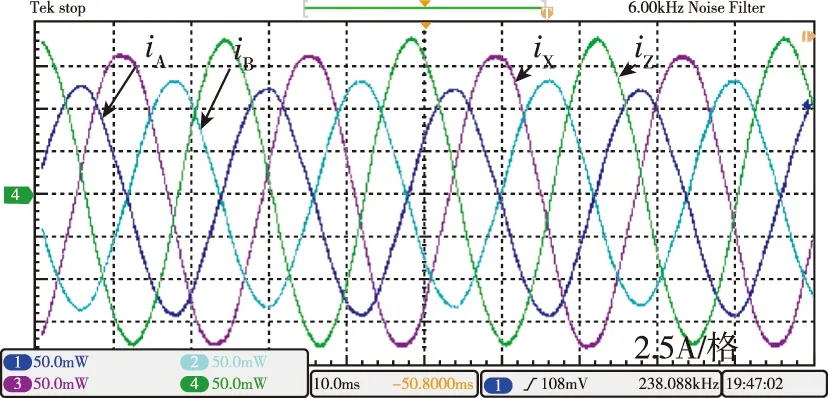
(a)相电流波形
4 结 论
针对传统容错控制策略无法同时兼顾电机运行效率与带载能力的问题,本文分析了不同控制方式下电机驱动系统的容错性能,提出了基于最小铜耗和最大转矩的折衷容错控制策略。实验结果表明:所提容错控制策略可以实现最大转矩输出能力范围内的定子铜耗最小,在提高带载能力的同时实现效率最优。
猜你喜欢
防爆电机(2023年6期)2023-11-30 03:05:28
新型工业化(2021年8期)2021-10-23 10:27:10
电子与封装(2021年7期)2021-07-29 10:58:48
测控技术(2018年9期)2018-11-25 07:44:40
大电机技术(2018年4期)2018-09-26 03:11:28
电测与仪表(2016年5期)2016-04-22 01:13:44
电测与仪表(2016年9期)2016-04-12 00:29:58
电测与仪表(2016年14期)2016-04-11 12:32:40
西部广播电视(2015年1期)2016-01-15 02:05:37
电测与仪表(2015年13期)2015-04-09 11:57:36
