GAT-D陀螺经纬仪在长盾构区间测量中的研究与应用
2022-04-01 09:25朱辉
工程建设与设计 2022年5期
朱辉
(徐州市勘察测绘研究院有限公司,江苏徐州 221000)
1 引言
陀螺经纬仪是一种不受时间、地形等影响,能够测定真北方位的物理定向仪器,在国防、煤矿、铁路等部门得到广泛应用。近年来,随着我国城市轨道交通建设的飞速发展,陀螺经纬仪在城市轨道交通工程建设中的应用也越来越多,北京、广州、深圳等城市地铁建设中有不少利用陀螺经纬仪进行定向的工程实例,均取得了良好的效果[1]。
盾构施工工艺一般都是单向贯通,从始发井至接收井。因此,通过较短的地铁车站进行的联系测量,去指导较长区间盾构施工,是典型的测量技术中的引起误差的“短边定长边”问题。在盾构区间隧道测量中,一般隧道内地下控制导线都布设为支导线,随着支导线的长度,导线点的精度将逐步降低,长盾构区间的贯通测量则是地下工程测量的重难点。因此,研究在长盾构区间中进行陀螺经纬仪定向,对提高隧道贯通精度具有重大意义[2]。
本文以某地铁盾构长区间为例,研究了GAT-D 陀螺经纬仪定向的基本原理与技术要求,同时对陀螺定向提出一些建议。通过陀螺定向成果与联系测量成果进行比较分析,表明陀螺精度良好,成果可靠,可应用于长盾构区间测量。
2 陀螺经纬仪定向原理
陀螺经纬仪是通过高速旋转的陀螺马达本身的动力学特性以及地球自转的影响,完成寻找真北方向的目的。它不受时间、气候、地形的影响,无论白天黑夜,都能测定出测站点的真北方向。
3 应用实例
3.1 使用仪器
本项目拟使用由长安大学测绘与空间信息研究所、北斗天恒(西安)科技发展有限公司联合研制的GAT-D05 全自动陀螺全站仪,该陀螺仪的主要功能是测定真北方向,主要应用于矿山与地铁隧道测量等领域。GAT-D05 陀螺经纬仪技术参数如表1 所示。
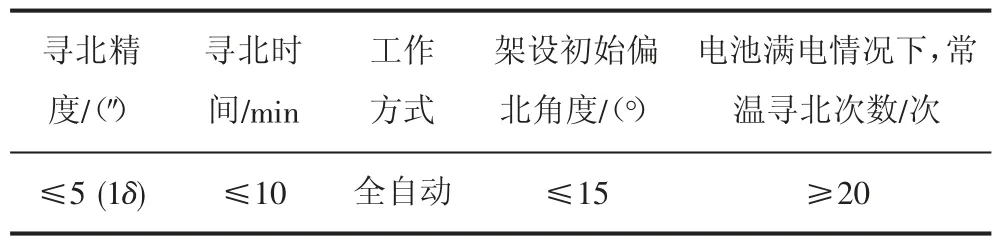
表1 GAT-D05 陀螺经纬仪技术参数
3.2 外业观测
地铁某盾构区间长约1.7 km,联系测量采用两井定向方法将方位角及坐标传递至井下,隧道内通过支导线进行导线控制测量,为保证隧道贯通精度,在隧道掘进至1 km 处进行陀螺定向测量,检核联系测量支导线传递的方位角。陀螺定向方法按照“地面已知边定向—地下定向边往返定向—地面已知边测后定向”的流程进行[3]。
3.2.1 地面已知边陀螺定向
对地面已知边进行测前陀螺方位角观测,采用联系测量定向边作为地面已知边进行陀螺定向。在地面控制网点GPS051 架设陀螺经纬仪,观测GPS051-GPS050 边的陀螺方位角。每次定向观测3 个测回,测回间陀螺方位角较差最大值为6.9″,测前测后零位变化均小于0.1 格。
3.2.2 地下定向边陀螺定向
在完成地上已知边测前观测后,在地下控制点ZJY7 设站,观测ZJY7-ZJY8 的陀螺方位角,完成后进行对向观测ZJY8-ZJY7 的陀螺方位角,并记录至掌上电脑中。地下定向边独立进行3 测回,往返定向2 次。测回间陀螺方位角较差最大值为7.4″。
3.2.3 地面已知边测后检查
完成地下定向边陀螺定向后,还需回到地面已知边进行定向,检查仪器常数是否发生变化,由于仪器搬动及隧道内振动可能对仪器造成影响。此次观测无须再进行初定向找北,可采用第一次的陀螺北观测值作为初北方向。测回间陀螺方位角较差最大值为6.4″。地面陀螺定向边测后观测数据如表2 所示。
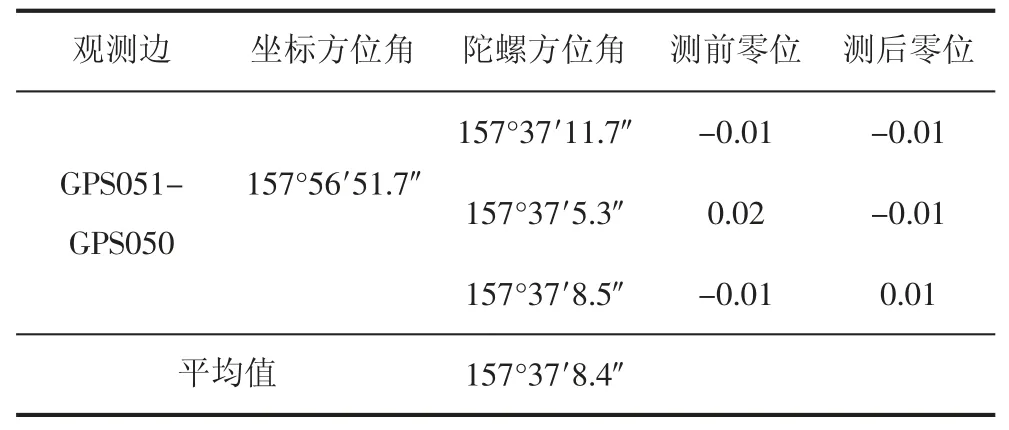
表2 地面陀螺定向边测后观测数据
3.3 数据处理
3.3.1 仪器常数计算
根据地面已知边GPS051-GPS050 上的测前及测后陀螺观测数据进行计算,测前地面已知边陀螺方位角观测平均值为157°37′10.0″,观测值中误差为2.0″,已知边坐标方位角为157°56′51.7″,测前仪器常数为-0°19′41.7″。测后地面陀螺方位角观测平均值为157°37′8.4″,观测值中误差为2.9″,测后仪器常数为-0°19′43.3″。测前、测后常数较差为1.6″。
3.3.2 子午线收敛角计算
子午线收敛角是指通过该点的子午线投影与过该点的纵坐标线之间的夹角,规定西偏为正,东偏为负。子午线收敛角计算见表3。
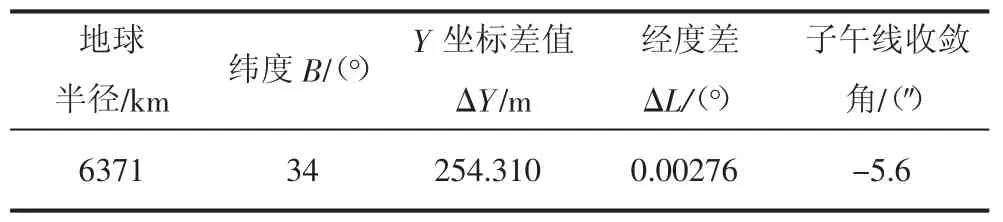
表3 子午线收敛角计算
3.3.3 坐标方位角计算
通过对仪器常数进行计算,得知仪器常数为-0°19′42.5″。
地下定向边陀螺方位角=地下边陀螺观测方位角(ZJY7-ZJY8)-仪器常数+子午线收敛角,计算结果详见表4。
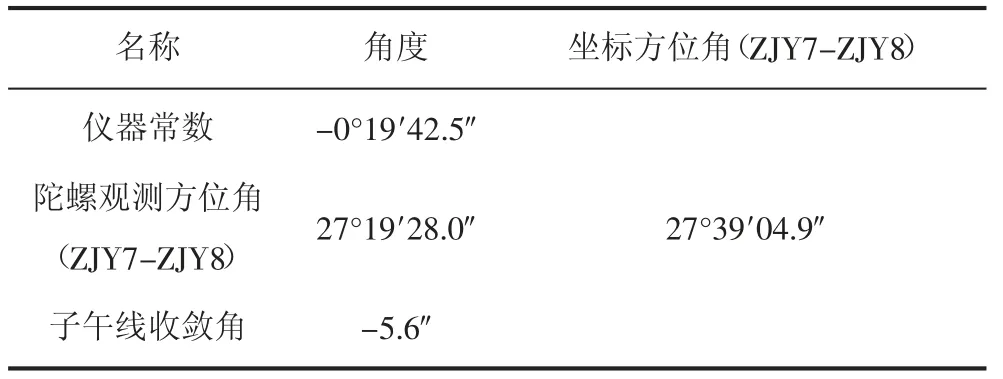
表4 地下定向边陀螺方位角计算表
4 精度分析
4.1 定向测量精度
本次陀螺经纬仪定向测量在外业测量过程中严格按照GB/T 50308—2017《城市轨道交通工程测量规范》中的技术要求执行,测回间陀螺方位角较差最大为7.4″,满足规范要求的±20″;两次仪器常数较差1.6″,满足规范要求的±15″;测前、测后地面定向边陀螺方位角中误差分别为2.0″、2.9″,观测地下定向边陀螺方位角中误差为1.2″[4]。
4.2 陀螺定向与联系测量成果比较
陀螺定向边成果与两井定向联系测量成果较差为2.0″,ZJY7-ZJY8 联系测量成果是从隧道洞口通过两井定向联测及支导线引测至隧道内,而ZJY8 点位埋设在约隧道内850 m处,支导线传递导致导线方位精度已经严重降低。因此,采用自动陀螺经纬仪进行陀螺定位,能有效检核导线方位精度,控制洞内支导线测角方位误差的传递,可以提高长盾构区间的平面贯通精度。
5 影响陀螺定向精度的主要因素
5.1 振动对测量的影响
陀螺经纬仪的振动受内部因素及外部环境的影响。在使用过程中重点需要注意外部环境的影响。外部环境影响主要有以下几点:(1)人员在仪器旁来回走动,由于地铁隧道临时人行通道比较窄,过往人员较多;(2)隧道内电瓶车行驶振动影响;(3)隧道内施工影响,特别是有爆破冲击振动源等。
因此,在陀螺仪经纬仪测量过程中,不能在仪器附近做可能产生振动影响的动作。
5.2 温度变化对测量的影响
陀螺经纬仪温度变化主要表现为以下2 点:一是外界环境温度的变化;二是陀螺经纬仪马达内部产生的温度变化。随着陀螺仪的内部温度升高,会因为结构材料膨胀系数的不同,导致陀螺仪的中心发生位移,从而使陀螺仪的摆动中值产生漂移,从而影响其定向精度[5]。
因此,在测量时需注意:(1)仪器使用时应尽量避免太阳光长期直射;(2)为保证测量精度,寻北仪在定向测量时,遇到外界干扰或使用温度与贮存温度变化较大时,设备自动适当延长定向测量时间;(3)如果仪器使用环境温度与仪器存放温度相差大于5 ℃,应将仪器提前放置在工作环境温度下稳定2~4 h。
5.3 子午线收敛角的影响
子午线收敛角改正值Δγ 主要受以下因素影响:(1)地下定向边与地面已知边所在投影带的地理位置关系,主要指经纬度的关系;(2)地下定向边与地面已知边的相对位置关系,即地面已知边与地下定向点的坐标差值,即Δγ 与ΔY[6]。
根据子午线收敛角大小随经纬度的变化规律可知:当地下定向边与地面已知边距离越近时,子午线收敛角差值越小;当距离在一定范围内时,可以使得子午线收敛角的差异较小;越靠近投影带边缘的定向边,所采用的地面已知边也应尽可能靠近定向边,则子午线收敛角差异对陀螺定向的影响几乎可以消除。在实际计算过程中,当ΔY 大于60 m 时,必须要进行子午线收敛角改正数计算。
6 结语
本文结合工程实例,介绍了陀螺经纬仪定向的基本原理与作业过程,对长盾构区间测量具有一定的指导意义。总结本项目,得出以下经验:
1)通过本次定向过程,可以认定GAT-D 陀螺经纬仪在野外实际定向的精度完全可以达到其标称精度。相比传统陀螺经纬仪,在启动和制动陀螺时均无须等待,在定向过程中仪器采用手簿自动记录,能达到提高精度、节省人力、节约电量、提高作业效率的目的。
2)为保证测量精度,需避免外界干扰,特别是隧道内振动及温度变化对测量的影响。
3)在实际工作中,尽可能保证已知边靠近定向边,减小子午线收敛角影响,当ΔY 大于60 m 时,必须添加子午线收敛角改正数。
猜你喜欢
宇航计测技术(2022年2期)2022-06-01
矿山测量(2020年4期)2020-09-03
空间科学学报(2020年4期)2020-04-22
现代计算机(2018年19期)2018-08-01
中学生数理化·七年级数学人教版(2017年1期)2017-03-25
百科探秘·航空航天(2016年9期)2016-12-01
科技创新与应用(2016年9期)2016-05-14
火炮发射与控制学报(2015年2期)2015-11-27
知识窗(2015年11期)2015-05-14