基于BIM技术的空间双曲面赛道毫米级精度控制方法研究
2022-04-01 09:25彭辉刘莎莎
工程建设与设计 2022年5期
彭辉,刘莎莎
(上海宝冶冶金工程有限公司,上海 201999)
1 引言
北京2022 年冬奥会国家雪车雪橇中心赛道为国内首条、亚洲第3 条设计及施工难度极大的奥运赛道。赛道依山势而建,呈蜿蜒起伏状,为长线型空间扭曲的双曲面结构,采用永久性结构喷射混凝土施工技术。运动员在赛道内曲功能面高速滑行,滑行最高时速为135 km。雪车或雪橇无制动装置,竞技运动要求赛道功能面空间坐标和成型精度达到毫米级,否则将直接影响运动员的比赛成绩和个人安全。
赛道骨架结构安装包含夹具、制冷管道、钢筋、高精度找平管,分别具有定位、通冷降温、结构整体受力、辅助精度成型的功能。夹具由原设计参数指导制作和安装,用来控制赛道设计断面坐标和固定制冷管道;在制冷管道上,以此安装双曲面钢筋骨架和高精度找平管。因设计参数仅代表既定断面,其余空间异型曲面无设计参数,因此,采取BIM 参数化建模的方式对赛道整体曲面进行深化,提取特征坐标参数并建立仿真模型[1]。通过对各安装工序中特征坐标点的精确测量进行控制,将混凝土喷射加工成型曲面的三维影像扫描同BIM 仿真模型的点云偏差进行比对,及时完成混凝土面的在线调整,最终实现成型面的毫米级精度。
2 雪车雪橇赛道设计分析
2.1 赛道原设计分析
赛道每2 m 或2.5 m 提供一个设计断面,通过该断面的标高、里程号、中心线、坐标点等可定位到具体位置,断面之间按照自然过渡的原则相连接,形成理想的曲面赛道,混凝土功能面任一点的空间坐标精度须在10 mm 以内。设计断面以外的部分无坐标参数,故无法通过测量手段控制安装精度。
2.2 赛道深化设计
为实现赛道空间双曲面异型结构的安装精度控制,采用BIM 参数化建模技术建立三维仿真模型。
犀牛Rhino 软件参数化建模在特异型曲面结构建模方面具有独特的优势,同时可实现空间坐标参数的提取,可有针对性地提取特征点坐标或任意选点测量,将测量坐标导入模型计算实际偏差,使原来对少量“特征点”的精度控制提升至“实体面”的控制[2],如图1 所示。

图1 BIM参数化建模
3 毫米级精度控制方法的研究与应用
3.1 骨架安装过程的精度控制方法
3.1.1 夹具安装精度控制
夹具能控制赛道断面的位置和固定制冷管道,是赛道骨架精度的控制基础,采用20 mm 厚钢板激光切割成型,上有方形卡齿用于固定制冷管的安装位置,同时卡齿的角点也作为测量安装的特征点,如图2 所示。通过模型提取夹具的特征点坐标,安装时使用全站仪跟踪测量并实时调整,使夹具安装精度控制在2 mm 以内。

图2 北京2022 冬奥会雪车雪橇赛道夹具和制冷管道
3.1.2 制冷管道和钢筋骨架安装精度控制
制冷管道为φ34 mm 的特殊管材,因长度较长而具有一定柔韧度,理论上制冷管与夹具接触的每个点安装牢固即可形成自然过渡线形,制冷管道表面安装三维钢筋骨架,钢筋紧贴制冷管依附成型。上述2 道工序可通过多点目测观察和塞尺检测其接触点是否存在间隙判断其安装精度。
制冷管道与钢筋骨架安装完成后,对夹具特征点进行精度复测,通过夹具上的可调节装置实现超差的调整,使安装精度控制在5 mm 以内,如图3 所示。
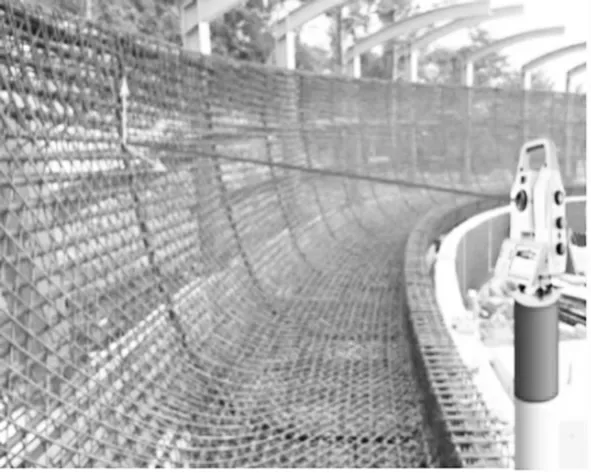
图3 夹具精度复测
3.2 混凝土成型面的精度控制方法
3.2.1 找平管安装精度控制
找平管为赛道曲面混凝土提供参照的基准。找平管的安装方法为:选用与钢筋保护层厚度等外径的特殊管材,按一定间距安装在赛道曲面的钢筋骨架上,如图4 所示。混凝土喷射完成后,沿相邻管道刮下多余混凝土,即得到理想成型面。找平管最上表面的点和混凝土成型面相重合,可通过测量找平管的安装精度提前判断混凝土成型面的精度。
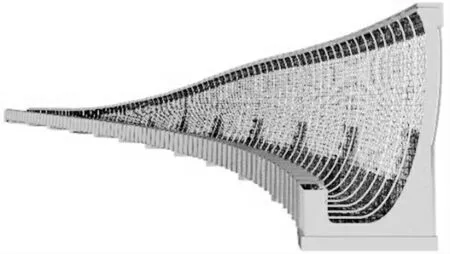
图4 赛道骨架三维模型
找平管安装间距为500~800 mm,与原设计断面不重合,基于参数化建模技术加以深化。使用全站仪测量找平管上表面均匀等分的控制点,将坐标值导入BIM 模型,比对被测点的偏差值,对误差超过10 mm 的部位做调整[3],如图5 所示。

图5 找平管测量
3.2.2 混凝土成型后的精度控制
混凝土喷射找平初凝前后,对混凝土表面做三维影像扫描[4],如图6 所示。确定后视坐标点的三维激光扫描仪可快速且准确地扫描测得混凝土面的点云图,同仿真模型进行比对,设定误差值范围并通过不同颜色凸显,再点选超差部位任意处读取具体数值,以此指导赛道实体的在线定量修复,确保赛道功能面点、线、面的空间毫米级精度,如图7 所示。

图6 赛道混凝土面三维扫描
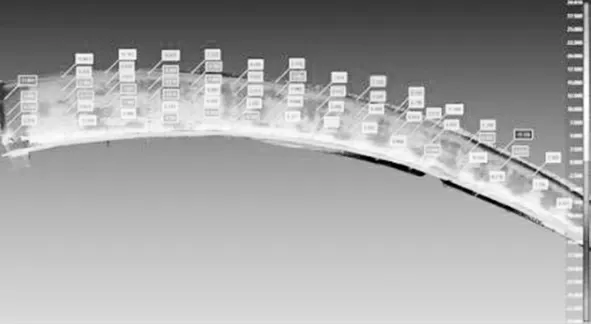
图7 扫描云图对比
4 结语
1)空间曲面异型结构难以通过二维图纸完成实体转化,可依据参数有限,无法实施精度测量控制,BIM 参数化建模技术能实现复杂结构的仿真建模和三维坐标值任意点的提取。
2)利用BIM 参数化建模对赛道夹具和找平管上表面提取坐标点网,辅助测量技术修正夹具和找平管安装精度;在混凝土喷射成型前对赛道骨架的安装精度进行偏差分析和调整。
3)通过BIM 技术仿真建模,结合三维激光影像扫描技术,可快速实现精度偏差区域的定量输出,及时完成赛道混凝土成型面的在线精度调整。
猜你喜欢
石材(2022年4期)2022-06-15
橡塑技术与装备(2022年6期)2022-06-02
电子乐园·上旬刊(2022年5期)2022-04-09
汽车实用技术(2022年5期)2022-04-02
汽车工艺师(2021年7期)2021-07-30
建材发展导向(2021年11期)2021-07-28
哈尔滨轴承(2021年4期)2021-03-08
中国新技术新产品(2020年5期)2020-05-06
农业工程技术·温室园艺(2017年3期)2017-07-13
汽车零部件(2016年6期)2016-07-18