考虑刻度尺误差的捷联成像系统惯性视线重构方法
2022-04-01 02:13:38李春文焦迎杰陶国辉
弹箭与制导学报 2022年1期
王 龙,王 萧,李春文,焦迎杰,陶国辉
(1 西安现代控制技术研究所,西安 710065; 2 清华大学自动化系,北京 100084)
0 引言
图像捷联导引头相比较于平台头而言,取消了万向支架和稳像平台,从而减轻了重量,减小了体积,大幅降低了成本,并提高了可靠性。但由于捷联制导信息无法应用于比例导引系统,需要进一步提取惯性制导信息。这一问题得到了学术界和工程界的广泛关注,并且已有许多学者对此问题提出自己的方法。目前主要方法可归纳为两大类:一类方法是利用导引头测得的弹体视线角和惯性测量组件测得的弹体姿态信息,通过解耦求取惯性视线角,进而利用链式法则或者合适的微分器提取惯性视线角速率,该方法在工程上应用较为广泛;另一类方法是利用运动学规律建立合适的状态转移方程,由惯性视线角与弹体视线角之间的解耦原理建立观测方程,从而建立完整的动态状态空间模型,并通过非线性滤波器评估惯性视线角速率,如粒子滤波器、无迹卡尔曼滤波器、中心差分滤波器以及扩展卡尔曼滤波器等。但鲜有学者针对捷联导引头与惯性测量器件之间刻度尺误差匹配问题进行深入探讨。文献[10]分析了刻度尺误差不匹配给惯性制导信息提取和制导控制系统带来的不稳定性,但并未给出更好的解决方案。文献[11]和文献[12]分别基于扩展卡尔曼滤波器(UKF)和无迹卡尔曼滤波器(EKF)设计了刻度尺误差估计方法,但均较多的依赖于弹体与目标间的相对运动信息,工程应用相对困难。
文中针对捷联导引头刻度尺误差,在分析其对惯性制导信息提取乃至制导控制系统稳定性带来的影响基础上,提出了一种利用UKF滤波器同时在线评估惯性视线角速率及导引头刻度尺误差的算法,保证图像捷联制导控制系统的稳定性和精确性。
1 UKF算法
1.1 UKF算法原理简介
针对常规非线性系统,EKF的工程应用最为广泛。该算法对非线性系统采取线性化处理的方式,实现状态变量经非线性系统传播后均值和方差的估计。区别于这一传统思想,UKF是一种基于无迹变换(UT)的滤波方法。利用一种确定性的采样方式以当前状态变量为中心采集一组加权采样点,利用其均值与方差描述当前状态变量的高斯分布;利用该组采样点通过非线性系统传播后的验后均值和方差描述当前状态变量通过非线性传播后的状态分布。相比于EKF算法,UKF与之复杂度相同,但其滤波精度有较大提高,同时避免了求解Jacobi矩阵的复杂过程;相比于蒙特卡洛算法,UKF采样点大大减少,算法效率更高。因此,UKF应用越来越广泛。
1.2 UKF算法实现方法
不失一般性,假定非线性系统的动态状态空间模型可表示为:

(1)
式中:为当前采样时刻;为维状态向量;为维观测向量;-1为输入量;-1为过程噪声;为观测噪声。
状态变量协方差矩阵定义为,过程噪声的协方差矩阵定义为,而观测噪声的协方差矩阵定义为。(·)为状态转移函数,(·)为量测函数。
针对上述非线性模型,典型的UKF算法主要流程如下:
1)状态变量扩维及初始化

2)Sigma点采样



3)状态一步预测

4)利用更新状态重新采集Sigma点

5)观测一步预测

6) 量测更新

7)递推至下一时刻,返回至流程2)。
2 捷联成像惯性视线重构原理
2.1 坐标系、关键变量定义及转化关系
为了便于讨论,进行如下坐标系定义:
1)地面坐标系(惯性坐标系)
原点选在导弹发射点;轴选在弹道平面与水平面的交线,指向目标为正;轴在包含的铅垂面内,垂直于,向上为正;轴与,构成右手坐标系。
2)弹体坐标系
原点选在导弹质心;与弹体纵轴重合,指向导弹头部为正;在导弹纵对称面内,与垂直,向上为正;与,构成右手坐标系。
针对特别重要的姿态角和需要进行研究的弹目视线角做出如下定义:
1)俯仰角ϑ
导弹纵轴与地面坐标系水平面的夹角,指向水平面上方为正。
2)偏航角
导弹纵轴在地面坐标系水平面内的投影与地面坐标系之间的夹角;投影在的逆时针方向为正。
3)滚转角(倾斜角)
弹体坐标系与包含弹体的铅垂面之间的夹角;从弹体尾部看,若位于铅垂面右侧为正。
4)弹体视线高低角
弹目视线矢量与弹体坐标系平面之间的夹角,向上为正。
5)弹体视线方位角
弹目视线矢量在弹体坐标系平面上的投影与弹体坐标系轴之间的夹角。在逆时针方向为正。
6)惯性视线高低角
弹目视线矢量与惯性坐标系平面之间的夹角,向上为正。
7)惯性视线方位角
弹目视线矢量在地面坐标系上的投影与地面坐标系轴之间的夹角,逆时针为正。
需要指出的是,弹体姿态角由惯性测量组件直接求得;弹体视线角为捷联导引头所测得;而惯性视线角则为捷联制导信息提取算法所评估的目标。
2.2 惯性视线角重构原理与方法
相比于平台导引头,捷联导引头的光学系统刚直的固定在弹体上,实时量测并输出弹体视线角。如图1所示,以俯仰通道为例,捷联导引头测量体视线角中包含惯性视线角和弹体俯仰角ϑ两部分信息。因此需从弹体视线角信息中提取出惯性视线角信息,以便对导弹进行制导。

图1 不同导引头输出信息对比示意图
设弹目视线矢量为,弹目距离为,则弹目视线矢量在惯性坐标系和弹体坐标系下分别表示为:
(2)
根据弹体视线角及惯性视线角定义有:

(3)
考虑到弹体坐标系与惯性坐标系之间的天然转换关系,则有:
=(,ϑ,)
(4)
式(4)中,转换矩阵为:

(5)
由式(3)与式(4)推导可得,弹体视线角与惯性视线角之间解耦关系为:

(6)
(7)
3 惯性视线重构误差分析
3.1 导引头刻度尺误差特性
由上述分析不难发现,影响惯性视角解耦精度的主要因素包括惯性测量组件输出的三轴姿态角精度、捷联导引头输出弹体视线角精度以及二者之间的相位匹配性误差。目前,经过刻度因子标定的MEMS陀螺输出误差主要包含零位误差以及线性漂移两部分,对制导控制系统影响较弱;而陀螺与导引头的时间匹配性可通过一定工程手段解决,因此对上述问题不做深入探讨。
图像捷联导引头量测误差主要为光电系统自身固有的刻度尺系数误差及高频噪声量部分。其中刻度尺误差对捷联导引头探测精度产生影响往往更为深刻,且随着图像捷联导引头视场的增加,量测误差逐渐增大。根据以往测试结果和工程经验,该刻度误差往往处于5%左右,如图2所示。文中着重针对导引头刻度尺误差带来的影响进行分析,并给出相应的解决办法。

图2 图像捷联导引头输出误差随视线角变化
为研究方便,定义图像捷联导引头输出的弹体视线高低角和方位角刻度尺误差系数分别为Δ和Δ,则弹体视线角量测值与真实值之间天然地具有如下关系:

(8)
3.2 导引头刻度尺误差的影响分析
为了便于定性分析,且不失实际意义,假设,,ϑ,,角度较小。由式(6)视线角与姿态角关系近似为:

(9)
进而,角微分之间有如下方程近似成立:

(10)
考虑到捷联图像导引头的测量值具有的刻度尺系数误差,因此有:
(11)
即:
(12)

为了验证上述结论,以某型制导弹药典型弹道为基础,针对不同刻度尺误差条件下,惯性视线角及角速率解耦精度进行了统计和分析。表1的解耦误差统计数据表明,惯性视线角和惯性视线角速率解耦误差的均值与方差随着刻度尺误差增加呈线性增大。

表1 惯性制导信息解耦误差表
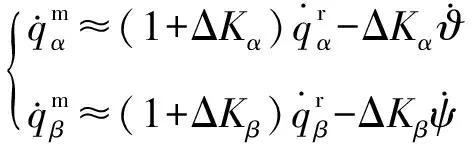
图3给出图像捷联导引头刻度尺误差5%条件下,惯性视线角高低速率解耦误差与弹体俯仰角速率对比曲线。为了方便对比二者之间关系,图中姿态角速率值进行了比例尺(1∶20)调节。显然,惯性视线角速率主要的解耦误差与弹体姿态角速率正相关。利用六自由度仿真可知,当解耦出的惯性制导信息引入制导控制回路后,弹体姿态角速率会出现大幅抖动,而该抖动又使得惯性制导信息解耦误差幅值进一步增大,从而导致整个控制系统的发散。
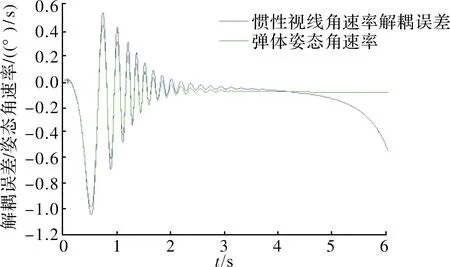
图3 视线角速率解耦误差与姿态角速率关系
4 解决方案实施与仿真验证
针对刻度尺误差问题造成的影响,常规的滤波方法往往无法解决该问题,文中提出一种解决方案,即通过UKF算法同时在线合理的估计刻度尺系数,并高精度提取制导信息,从而消除弹体姿态信息耦合的影响。
4.1 动态状态空间模型建立

ΔΔ]。相应的,状态转移方程可表示为:

(13)
式中,[]为噪声向量,与为与弹目相对运动信息相关的非线性项。考虑到非线性项数值较小,且实际武器系统难以获取,将其作为噪声进行处理,即==0。
根据捷联导引头输出特性以及弹体视线角和惯性视线角之间的天然解耦关系,建立量测方程如下:

(14)
式中捷联导引头两个通道的量测噪声和可认为是高斯白噪声。
4.2 数字仿真分析
采用某制导弹药典型闭环控制弹道环境数据进行数字仿真,并对考虑捷联导引头刻度尺误差的UKF算法(算法1)和常规UKF算法(算法2)滤波结果进行对比和分析。由于不考虑刻度尺误差滤波算法往往带来制导控制系统的发散,对比分析数据采用离线模式进行处理。
4.2.1 滤波结果与对比分析
图4和图5分别给出了不同动态模型条件下,UKF针对惯性视线高低角、方位角及其角速率的估计结果。显然,动态模型未考虑刻度尺误差时,UKF无法有效滤除弹体姿态抖动对惯性视线角及其角速率的影响,尤其是弹体姿态的剧烈抖动严重影响惯性视线角速率的估计品质。而动态模型引入刻度尺误差作为状态变量之后,UKF可对惯性视线角率全程平滑而稳定的跟踪。不同算法的跟踪误差特性如表2所示。
图4 惯性视线方位角信息结果对比分析

图5 惯性视线高低角波结果对比分析

表2 惯性制导信息滤波误差表
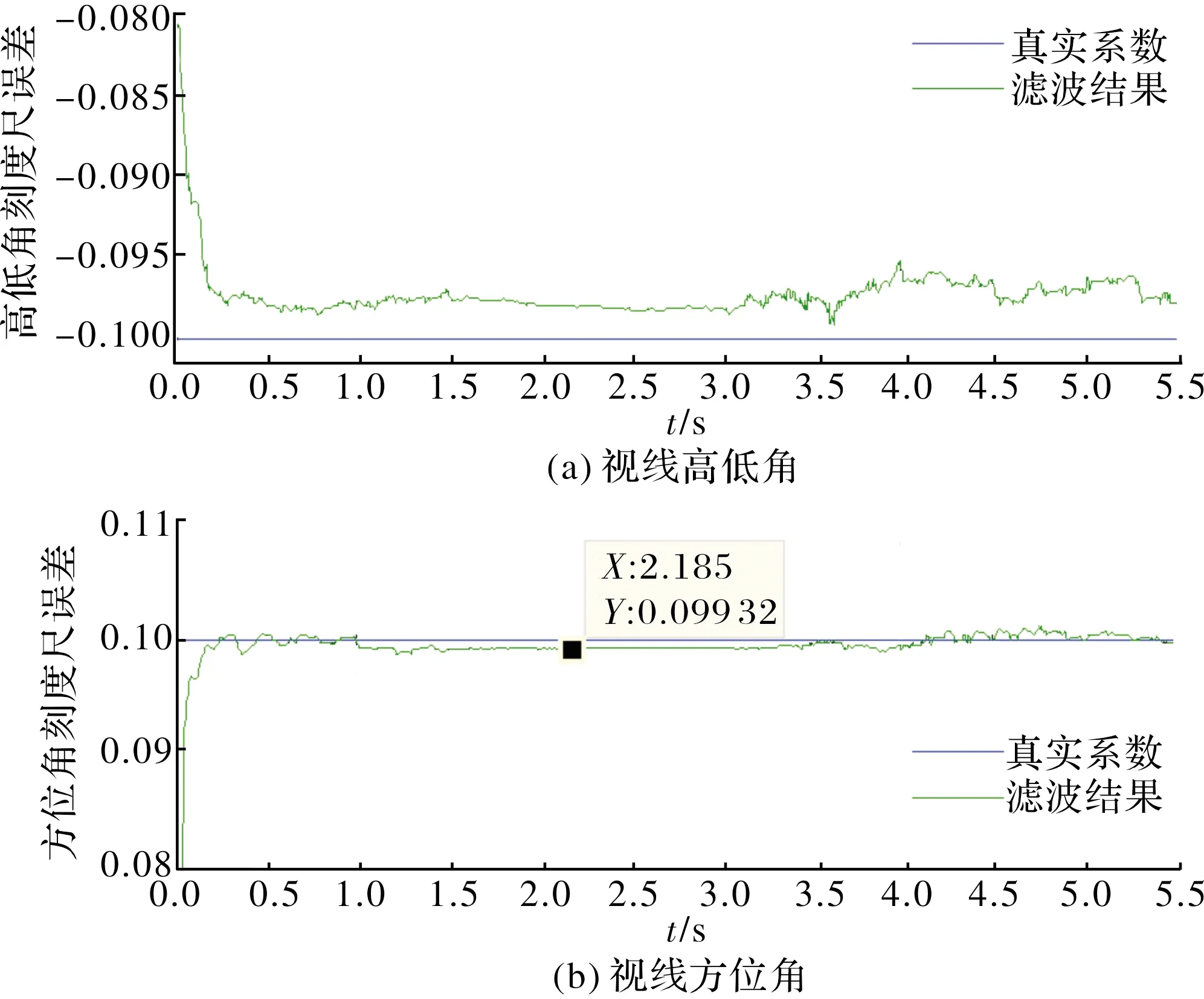
图6 UKF估计弹体视线角刻度尺系数
图6给出UKF算法对捷联导引头输出的弹体视线高低角和方位角的刻度尺误差估计结果。其中高低角稳定跟踪误差不超过5%,平均跟踪误差约为3%;方位角稳定跟踪误差不超过1.1%,平均跟踪误差约为-0.08%。
4.2.2 制导精度数字仿真验证
为了进一步验证提出的滤波模型和算法的有效性,将UKF提取的惯性视线角速率引入比例导引系统,并进行蒙特卡洛仿真分析,对制导弹药脱靶量进行统计。参考某型弹现有器件性能、气动仿真精度及运动目标特性,仿真模拟的各主要扰动因素统计特性如下:
1)陀螺测量误差:三轴姿态角速率的量测噪声皆服从均值为0、标准差为0.3°/s的正态分布;
2)导引头量测误差:弹体视线角的测量噪声均服从均值为0、标准差为0.05°的正态分布;刻度尺系数误差服从均值为0、标准差为3.33%的正态分布;
3)气动参数拉偏:各系数服从均值为0、标准差为1.667%的正态分布;
4)目标机动:目标进行水平方向匀速运动,目标轴、轴方向速度服从均值为0、标准差为20 m/s的正态分布。
针对上述因素,对制导弹药六自由度模型进行500次蒙特卡洛仿真,导弹着靶点散布如图7所示,脱靶量统计特性如表3所示。

图7 着靶点散布图

表3 脱靶量统计特性 单位:m
5 结论
提出了一种基于UKF算法,利用图像捷联导引头及惯性测量组件信息,同时在线评估惯性视线角、惯性视线角速率以及导引头刻度尺误差的方法。相较于以往研究而言,该算法不依赖于弹上难以采集的弹目相对运动信息,而是以三轴姿态信息为基础。经仿真分析,该算法可快速而有效的剥离图像捷联导引头刻度尺误差对惯性视线解耦的影响,准确提取惯性制导信息,为比例导引律设计奠定坚实基础。
猜你喜欢
兵器装备工程学报(2022年7期)2022-08-10 03:37:18
爆炸与冲击(2022年2期)2022-03-17 07:28:44
上海煤气(2018年6期)2018-03-07 01:03:22
北京航空航天大学学报(2017年5期)2017-11-23 05:53:18
北京航空航天大学学报(2017年12期)2017-04-23 08:31:50
制导与引信(2016年3期)2016-03-20 16:01:58
火控雷达技术(2016年1期)2016-02-06 02:18:01
弹箭与制导学报(2015年1期)2015-03-11 15:32:08
弹箭与制导学报(2015年1期)2015-03-11 15:32:06
现代防御技术(2014年5期)2014-02-28 18:26:16