高焓膨胀管风洞性能调试试验研究
2022-03-31 12:49:18龚红明廖振洋吕治国孔荣宗张扣立罗义成
气体物理 2022年2期
龚红明, 常 雨, 廖振洋, 吕治国, 孔荣宗, 张扣立, 罗义成
(中国空气动力研究与发展中心超高速空气动力研究所, 四川绵阳 621000)
引言
超高速地面试验对于高超声速推进系统、 高超声速巡航飞行器、 地球大气再入以及行星进入飞行器的研究和发展具有重要支撑作用. 常规高超声速风洞和反射式激波风洞是目前开展高超声速气动力/热试验研究的主要设备, 但其速度/焓值模拟能力与实际飞行存在较大差距, 难以满足高温真实气体效应等高焓气动现象的模拟需求, 而膨胀管风洞的速度和焓值模拟能力突出, 并且由于运行过程中试验气流主要通过非定常膨胀获得加速, 不经历滞止过程, 因此相比反射式激波风洞能够提供离解度更低的自由来流, 可以更接近甚至复现飞行环境.
近几十年来, 为实现超高速高焓流场模拟, 澳大利亚、 美国、 日本等先后发展了多座大型膨胀管风洞. 澳大利亚昆士兰大学在20世纪八九十年代建设了膨胀管X1, X2, 并在此基础上于2001年建设了更大尺度的膨胀风洞X3[1-6], 能够获得最高速度8.5 km/s, 最高总焓43 MJ/kg的试验气流. 美国卡尔斯潘大学布法罗研究中心(CUBRC)为开展高温真实气体效应等高焓试验研究, 在LENSⅡ激波风洞上改造实现了膨胀管模式运行(LENS X)[7], 并在2009年建成大型膨胀管风洞LENS XX[8-12], 实现了速度12.2 km/s, 总焓90 MJ/kg的高焓流场模拟. 美国通用应用科学实验室(GASL)运行的HYPULSE激波/膨胀风洞[13-17]在2009年前后进行了性能提升以满足高焓流场辐射热流试验研究, 改造后最高激波速度达到12.5 km/s[18]. 2016年日本宇航中心将HEK自由活塞激波风洞改造为HEK-X膨胀管, 以模拟返回舱的高速再入[19-20]. 国内膨胀管设备虽然为数不多但近年来发展较快. 中国航天空气动力技术研究院2016年建成的FD-21自由活塞驱动高焓激波风洞设计时兼顾了膨胀风洞运行模式[21-23]. 2019年, 中国空气动力研究与发展中心(CARDC)建成高焓膨胀管风洞并形成能力[24-27].
本文介绍了CARDC高焓膨胀管风洞的性能调试进展及试验结果. 调试表明, 该风洞可模拟气流速度2.5~11.5 km/s, 最高总焓可达71.7 MJ/kg, 并具有可用的有效试验时间与良好的流场均匀性.
1 高焓膨胀管风洞
1.1 风洞结构组成
高焓膨胀管风洞可使用常温轻质气体驱动和自由活塞驱动, 分别用于实现低焓和高焓流场. 风洞主体结构如图1所示, 主要由活塞驱动段、 第2驱动段、 被驱动段、 加速段、 喷管和试验段组成. 活塞质量850 kg, 活塞驱动段内径600 mm, 其余激波管内径200 mm, 喷管出口直径800 mm. 试验段长5 m, 截面为2 m × 2 m. 设备总长约115 m, 其中被驱动段和加速段总长40 m, 两者分段长度可灵活调整以优化匹配. 测量系统配备了高速纹影、 高速数据采集、 气动力/热测量、 PLIF流场测速以及活塞测速等系统. 风洞照片如图2所示.
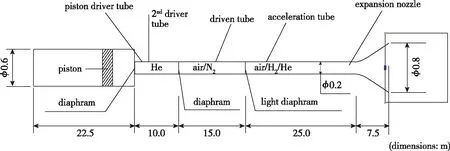
图1 高焓膨胀管风洞结构

图2 高焓膨胀管风洞照片
1.2 风洞运行原理
Trimpi[28]最早对膨胀管流动进行了理论分析, 参考其方法, 高焓膨胀管风洞的流动分区和运行波系如图3所示. 活塞在储气罐气体驱动下压缩管内轻质气体, 形成高温高压驱动气源, 使末端金属膜片快速破开, 在第2驱动段内形成第1道入射激波, 管内初始轻质气体经激波压缩后形成温度、 压力和速度均较高的驱动气流. 激波到达第2道膜片后使其瞬间破开, 在被驱动段形成第2道入射激波, 管内预充的试验气体(1区)经激波压缩后形成高温高压2区气流. 当2区气流达到第3道膜片(轻薄的聚酯膜), 膜片瞬间破开, 在(初始压力更低的)加速段内(10区)形成速度更高的第3道入射激波, 波后为20区气流. 第3道膜片破裂同时会形成左行非定常膨胀波, 2区气流经此非定常膨胀后速度和焓值显著提高, 温度降低, 形成5区气流. 无喷管情况下(膨胀管模式)5区即为试验气流, 有喷管情况下(膨胀风洞模式), 20区和5区气流先后进入喷管, 经定常膨胀后进入试验段, 其中5区膨胀形成6区试验气流. 6区比5区气流略有提速, 径向均匀区范围显著增加.
常温轻质气体驱动是利用除活塞驱动段外的其余部段运行: 在第2驱动段充高压轻质气体作为驱动气体, 在被驱动段充试验气体, 加速段仍保持低压. 两道膜片破裂后依次在被驱动段和加速段形成两道入射激波及非定常膨胀波, 仍按图3分区, 以5区(膨胀管模式)或6区(膨胀风洞模式)为试验气流. 相比活塞驱动更快捷简便, 主要用于低焓流场状态.
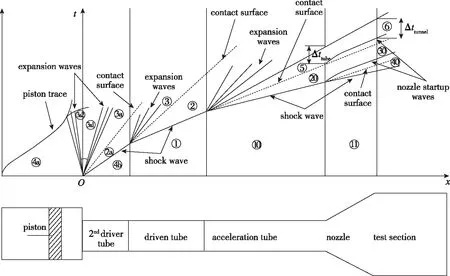
图3 活塞驱动膨胀管风洞运行波系简图
2 风洞调试方法
2.1 流场测量方法
调试试验中主要测量被驱动段、 加速段的管壁静压和激波速度, 以及加速段出口或喷管出口流场的Pitot压力. 20区/5区静压较低, 如高焓状态下通常约几千帕, 但后续来流压力可能高出数倍甚至数十倍, 因此须小心选用适当量程和灵敏度的传感器, 以可靠测量静压且能承受一定的高压. 压力传感器响应速度应足够快, 例如上升时间应不大于2 μs, 以准确测量激波的到达时刻, 获取激波速度.
Pitot压力可用于中低焓值状态下区分20区和5区气流, 也是膨胀风洞模式下计算自由流参数的重要输入参数. 高焓流场中测量Pitot压力相对困难, 既要保护压力传感器不受流场中高动能杂质粒子的撞击而损坏, 还要能快速响应并耐受高温气体的加热. 为此在常规Pitot探头内部设计了一种保护装置. 保护装置会降低探头的响应速度, 但可根据测量效果调节保护装置的通孔孔径及数量. 图4为带保护装置与不带保护装置(传感器在探头端面平齐安装, 直接面对来流)条件下在加速段出口测量的Pitot压力曲线. 可见, 保护装置确实降低了探头对气流到达的感应速度, 不能测量首先到达的20区气流的Pitot压力, 但在所关心的5区试验时间内仍能获得可靠的测量结果, 与无保护探头测量结果的差异在1%以内.
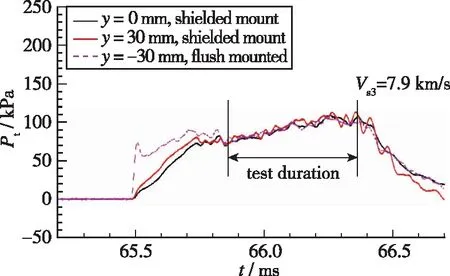
图4 带与不带保护装置的Pitot探头压力测量对比
2.2 流场参数理论计算方法
建立了适用于高焓膨胀管风洞的流场参数理论计算方法, 以风洞初始参数和运行测量参数为输入, 计算膨胀管模式5区及膨胀风洞模式6区试验气流参数. 其中主要包括跨运动激波参数计算、 非定常膨胀流动计算以及喷管定常膨胀流动计算.
2区和20区气流参数通过求解运动激波间断守恒方程(1)~(4)获得, 其中高温气体状态方程(4)按高温平衡空气模型计算.
ρ1us=ρ2(us-u2)
(1)
(2)
(3)
p=p(ρ,h)
(4)
式中, 下标1, 2分别表示波前和波后,us为激波速度.
2区气流经过等熵非定常膨胀形成5区, 熵不变, 即s5=s2, 同时两区之间满足接触相容关系, 速度和压力分别相等, 即u5=u20,p5=p20.p20可测量, 利用p5和s5可获得5区其他热力学参数. 当激波速度很快时, 考虑到管壁边界层导致接触面加速, 可认为u5近似等于激波速度us, 即2区气流从速度u2膨胀到u5, 则可按(5)式非定常等熵膨胀关系计算焓值h5, 由h5和s5可得5区其他热力学参数.
(5)
计算喷管出口流场参数时考虑图5所示的流动模型. 设5区气流经喷管等熵定常膨胀形成6区, Pitot探头脱体正激波波后近下游为6k区, 6k区与6区之间满足正激波间断守恒, 6k区到探头驻点(7区)的流动近似为等熵滞止过程. 利用已知的5区气流参数和测量的Pitot压力(7区压力), 根据总焓不变、 激波间断守恒及等熵关系, 结合高温空气状态方程, 可迭代求解6区气流参数.
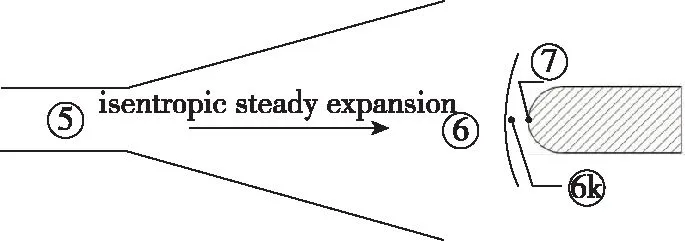
图5 喷管和试验段流动分区示意图
采用11组分高温空气模型计算气流平衡组分和热力学参数. 组分为O2, N2, O, N, NO, NO+, e-, N+, O+, Ar和Ar+, 采用文献[29]的热力学数据和Prabhu等[30]提出的快速迭代算法求解.
以上计算方法将跨激波流动视为平衡过程, 将非定常膨胀及喷管定常膨胀视为平衡或冻结流动计算. 虽然忽略了实际存在的热化学非平衡效应, 但对于评估风洞性能, 即所关注的气流速度和总焓而言影响较小, 重要的是该方法能够在每次试验后快速给出流场参数.
3 调试结果及分析
膨胀管模式与膨胀风洞模式分别以5区和6区作为试验气流, 从试验模拟和设备运行角度两种模式均有必要. 例如, 相同焓值状态下5区气流密度比6区高得多,ρL模拟能力强于6区. 此外, 低焓状态下为限制激波速度, 通常加速段与试验段初始压力较高, 若按膨胀风洞模式运行可能会因静压过低导致喷管启动困难不能获得有效的6区流场, 此时需要以5区作为试验气流.
3.1 膨胀管模式低焓状态调试
膨胀管风洞在低速状态下有效试验时间相对较长. 为考察可实现的最长有效试验时间, 以常温氦气驱动进行调试. 使用一段长5 m的激波管替代喷管, 加速段总长30 m. 初始条件为: 驱动段压力20 MPa, 被驱动段压力 15 kPa, 加速段压力280 Pa. 图6所示为加速段管壁测点的静压曲线(x以图3所示原点为起点), 图7为被驱动段与加速段的激波速度分布.
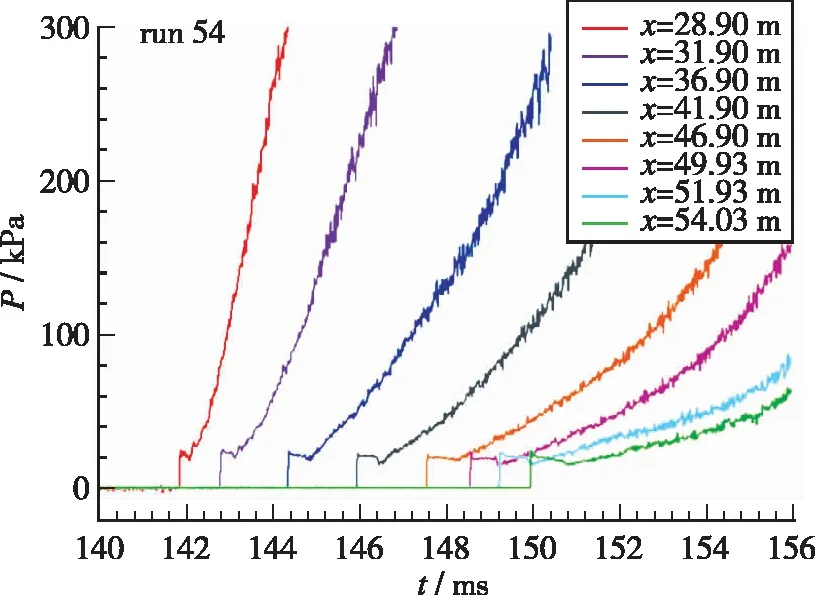
图6 膨胀管加速段管壁静压测量曲线
由图6可见, 沿加速段流向, 波后压力平台持续时间逐渐增加. 静压曲线的压力平台表明20区气流经过, 压力平台尾段的波动表明接触区气流到达, 之后5区气流到达. 受管壁边界层影响5区压力有一定程度的爬升. 5区气流之后是更高压力的左行膨胀波区气流. 由图7可见, 由于边界层黏性影响, 激波沿管长有一定衰减, 其中被驱动段激波速度不超过2 km/s, 因此2区气流基本无离解, 而加速段末端激波速度为2.91 km/s.
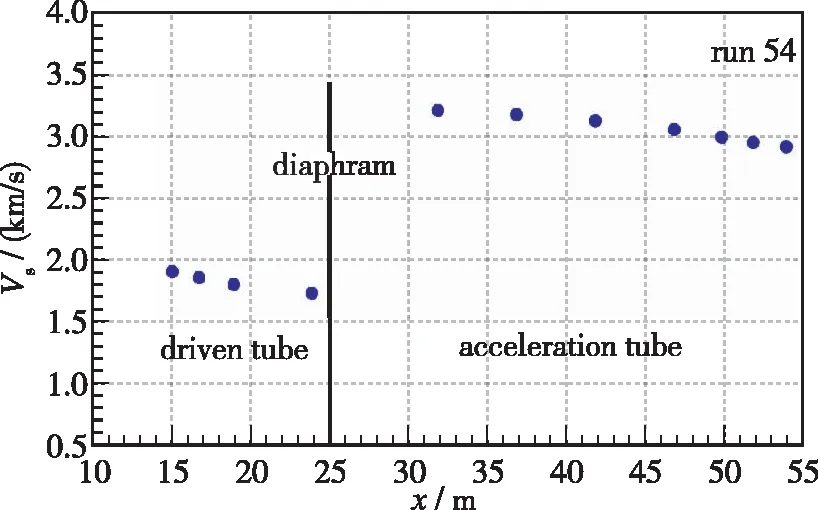
图7 被驱动段与加速段激波速度分布
图8展示了加速段出口Pitot压力曲线(以20区Pitot压力为参考无量纲化), 图中同时给出了加速段末端管壁静压曲线(以20区静压为参考无量纲化, 起始时刻调整到与Pitot压力相同). 由Pitot压力可明显区分5区与20区: 5区与20区静压、 速度基本相同, 但5区温度更低、 Mach数更高, 因此Pitot压力更高. 如图中标注, Pitot压力的两次跃升分别表示激波和接触面到达, 两次跃升后的压力平台依次为20区和5区, 5区之后是非定常膨胀波区. 这与从静压曲线识别的流动分区一致, 但更清晰. Pitot压力表明5区试验气流有效时间达到约 1.1 ms. 与此相比, 理论计算的20区和5区持续时间偏长, 这是未能考虑气流因为进入边界层引起的质量损失所致, 通常这种差异在加速段初始压力较高的低焓状态下更加显著. 根据前述计算方法, 该状态下5区气流速度为2.54 km/s, 静温702 K, 静压 18.5 kPa, 密度 0.087 kg/m3, 总焓 3.9 MJ/kg.
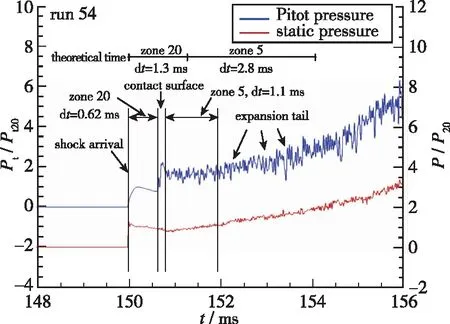
图8 膨胀管加速段出口Pitot压力测量曲线
3.2 膨胀管模式高焓状态调试
在活塞驱动膨胀管模式下进行了高焓状态调试. 初始条件为: 活塞压缩管压力30 kPa(He), 破膜压力39.8 MPa; 第2驱动段压力101 kPa(He), 被驱动段压力1.6 kPa, 加速段压力5 Pa. 图9~11分别展示了加速段管壁静压测量曲线、 被驱动段与加速段激波速度分布以及加速段出口Pitot压力测量曲线. 由图9可见, 沿加速段流向, 波后压力平台的延长表明20区及5区持续时间逐渐增加. 在5区平台的后段, 由于接触面反射稀疏波头追赶导致压力下降, 其后由于膨胀波尾到达而压力升高. 图10中, 被驱动段末端激波速度4.32 km/s, 加速段末端激波速度8.49 km/s. 该状态2区气流温度较高, 在后续非定常膨胀过程中气流温度显著降低, 由此带来一定程度的热化学非平衡. 这在调试模型试验的流场时应通过运行参数匹配进行优化或予以仔细评估.
图9 膨胀管加速段管壁静压测量曲线
图10 被驱动段与加速段激波速度分布
图11中, 由于加速段初始压力极低, 20区气流持续时间极短(仅几十微秒), Pitot压力也很低, 因此在Pitot压力测量曲线上20区已淹没于探头响应过程. 如图所示, 5区有效时间约390 μs, Pitot压力测量值也与理论计算值相符. 此外, 理论计算的接触面反射膨胀波头到达时刻也与5区Pitot压力及静压开始降低的时刻基本相符.
图11 膨胀管加速段出口Pitot压力测量曲线
按前述方法计算, 该状态5区气流速度8.03 km/s, 静温2 574 K, 静压2.1 kPa, 密度2.7×10-3kg/m3, 总焓36.1 MJ/kg.
3.3 膨胀风洞模式高焓状态调试
在膨胀风洞模式开展了设备极限高焓状态调试, 获得速度达到11.5 km/s的流场. 初始条件为: 活塞压缩管压力50 kPa(He), 破膜压力77 MPa; 第2驱动段压力101 kPa(He), 被驱动段压力 1.6 kPa, 加速段压力2 Pa. 图12展示了激波速度分布, 图13为喷管出口截面不同径向位置的Pitot压力曲线, 图14为喷管出口截面Pitot压力径向分布.
图12 被驱动段加速段激波速度分布
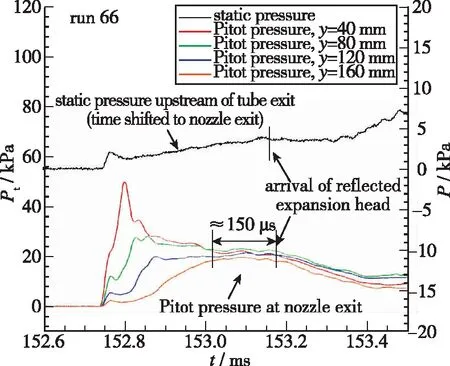
图13 喷管出口Pitot压力测量曲线
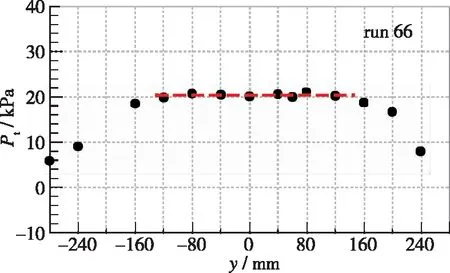
图14 喷管出口Pitot压力径向分布
由图12可见加速段激波速度衰减相对较小, 表明该状态下边界层影响相对较弱, 末端激波速度达到12.21 km/s. 由图13可见, 在喷管出口截面, 沿喷管径向, 流场建立时间逐渐延后, 有效持续时间逐渐变短, 这是由于喷管启动过程及喷管边界层发展的影响, 但整体而言喷管出口流场仍有约150 μs 的有效试验时间, 该区间的截止时刻与加速段5区静压变化特性一致. 图14表明, 在喷管出口截面, 可供模型试验的径向流场均匀区范围约φ240 mm. 根据校测参数, 计算得到喷管出口(6区)自由流速度11.5 km/s, 静温2 340 K, 静压 117 Pa, 密度1.5×10-4kg/m3, 总焓71.7 MJ/kg.
高焓状态下气流速度和总焓的理论计算结果受热化学模型的影响小, 但气流温度、 密度等参数受此影响较显著, 不确定度相对较大. 对于开展模型试验而言, 须更准确地评估流场特性和确定各项自由流参数, 对此通常的办法是结合一维分析及轴对称CFD模拟, 以及能够直接测量温度、 密度及组分等参数的非接触测量技术进行综合诊断.
3.4 高焓膨胀管风洞的模拟能力
根据调试结果和计算分析, 初步得到高焓膨胀管风洞的速度-高度模拟包络如图15所示. 可见, 与激波风洞(如CARDC的FD-14A、 美国LENSⅠ)相比, 膨胀管风洞大幅拓展了地面试验设备的速度模拟范围. 同时可见, 高焓膨胀管风洞的速度(焓值)模拟能力也与世界先进膨胀管风洞LENS XX的模拟能力基本相当.
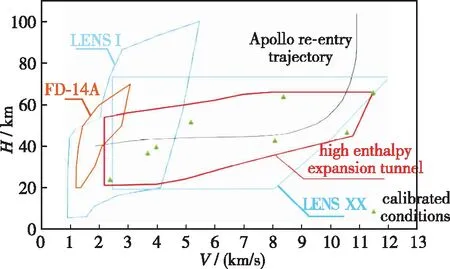
图15 高焓膨胀管风洞速度-高度模拟能力
4 结论
对CARDC新建的高焓膨胀风洞开展了性能调试试验研究, 试验结果表明, 通过两种驱动方式及适当的初始条件匹配, 风洞可实现气流速度2.5~11.5 km/s的流场模拟. 在速度11.5 km/s、 总焓71.7 MJ/kg 状态下,均匀区直径约φ240 mm, 有效试验时间达到150 μs, 较低焓值状态下能够获得相对更长的有效试验时间. 出色的速度模拟使得该风洞具备高温真实气体效应、 高温流场辐射加热等模拟能力, 能够为我国轨道航天器及探月返回器再入、 行星探测器进入与返回再入, 以及未来极高速飞行器的高焓流动研究提供有效的地面试验平台.
猜你喜欢
建材发展导向(2021年15期)2021-11-05 08:21:16
航空学报(2020年8期)2020-09-10 03:25:34
小哥白尼(野生动物)(2020年3期)2020-07-27 01:54:04
航空发动机(2020年3期)2020-07-24 09:03:16
岩土工程技术(2019年6期)2020-01-06 03:19:36
数学大王·中高年级(2018年11期)2018-12-17 08:13:54
测控技术(2018年10期)2018-11-25 09:35:58
实验流体力学(2018年3期)2018-10-10 03:10:12
制造技术与机床(2018年8期)2018-10-09 08:27:32
制造技术与机床(2018年9期)2018-09-19 06:47:44